Г2
Сл
со to
со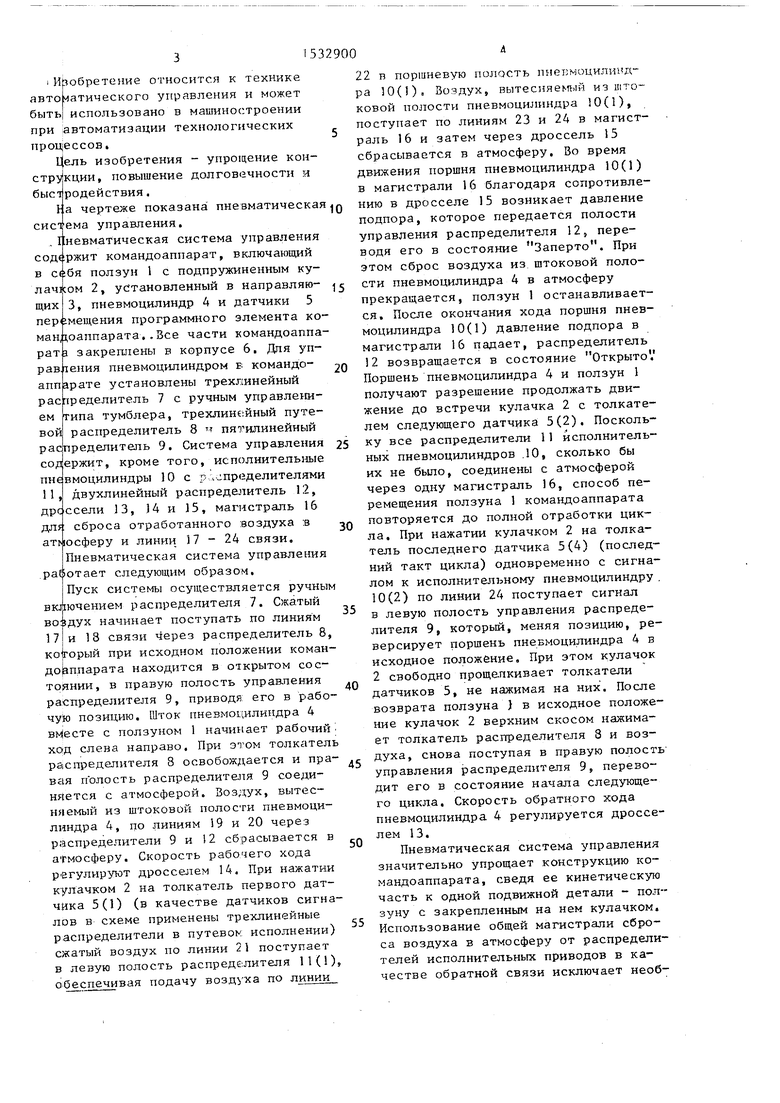
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления пневматическим манипулятором | 1978 |
|
SU943647A1 |
| Пневматический командоаппарат | 1980 |
|
SU937798A1 |
| Пневматический привод | 1988 |
|
SU1596142A1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДЕЙСТВИЯ | 1993 |
|
RU2016270C1 |
| Система управления уравновешивающим подъемником | 1986 |
|
SU1331805A1 |
| Пневмогидравлический привод многоместных зажимных приспособлений технологического оборудования | 1977 |
|
SU1022801A2 |
| СИСТЕМА УПРАВЛЕНИЯ МУФТОЙ И ТОРМОЗОМ МЕХАНИЧЕСКОГО ПРЕССА | 1994 |
|
RU2057024C1 |
| Адаптивный пневматический привод с обратной пневматической связью | 2018 |
|
RU2685167C1 |
| Позиционный пневмопривод | 1989 |
|
SU1642100A1 |
| УСТРОЙСТВО ДЛЯ АБРАЗИВНО-СТРУЙНОЙ ОБРАБОТКИ С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМ ДОЗАТОРОМ | 2007 |
|
RU2349445C2 |
Изобретение относится к технике автоматического управления и может быть использовано в машиностроении при автоматизации технологических процессов. Цель изобретения - упрощение конструкции, повышение долговечности и быстродействия. В системе установлен на магистрали сброса 16 в атмосферу двухлинейный распределитель 12. Выходы слива распределителей 11.1 и 11.2 также соединены с магистралью 16, а камера управления распределителя 9 подключена к распределителю 8. Пневматическая система управления упрощает конструкцию командоаппарата, исключает необходимость применения путевых датчиков в качестве линии обратной связи, а также существенно увеличивает рабочий ресурс пневмоцилиндра. 1 ил.
rafr) wfz}
Изобретение относится к технике автоматического управления и может
быть
испопьзовано в машиностроении
при автоматизации технологических процессов.
Цель изобретения - упрощение конструкции, повышение долговечности и быстродействия,
ha чертеже показана пневматическа система управления.
Пневматическая система управления содержит командоаппарат, включающий в себя ползун 1 с подпружиненным кулачком 2, установленный в направляю- щих 3, пневмоцилиндр 4 и датчики 5 перемещения программного элемента ко мандоаппарата..Все части командоаппарат а закреплены в корпусе 6. Для управления пневмоцилиндром Е команде- аппарате установлены трехлинейный распределитель 7 с ручным управлением гсипа тумблера, трехлинейный путевой распределитель 8 т пя илинейный распределитель 9. Система управления содержит, кроме того, исполнительные пне|вмоцилиндры 10 с г определителями
И.
двухлинейный распределитель 12,
дрсссели 13, 14 и 15, магистраль 16 длг сброса отработанного воздуха в атмосферу и линии 17-24 связи,
Пневматическая система управления работает следующим образом.
Пуск системы осуществляется ручным включением распределителя 7. Сжатый воздух начинает поступать по линиям 17Jи 18 связи через распределитель 8, который при исходном положении коман- до&ппарата находится в открытом состоянии, в правую полость управления распределителя 9, приводя его в рабочую позицию. Шток пневмоцилиндра 4 вНесте с ползуном 1 начинает рабочий ход слева направо. При этом толкатель распределителя 8 освобождается и пра- вая п олость распределителя 9 соединяется с атмосферой. Воздух, вытесняемый из штоковой полости пневмоцилиндра 4, по линиям 19 и 20 через распределители 9 и 12 сбрасывается в а Гмосферу. Скорость рабочего хода регулируют дросселем 14, При нажатии кулачком 2 на толкатель первого датчика 5(1) (в качестве датчиков сигналов в схеме применены трехлинейные распределители в путевок исполнении) сжатый воздух по линии 21 поступает в левую полость распределителя 11(1), обеспечивая подачу воздуха по линии
0
5
0
5
0
.,
0
5
22 в поршневую полость ппев чоцилт д- ра 20(1), Воздух, вытесняемый из шоковой полости пневмоцилиндра 10(1), поступает по линиям 23 и 24 в магистраль 16 и затем через дроссель 15 сбрасывается в атмосферу. Во время движения поршня пневмоцилиндра 10(1) в магистрали 16 благодаря сопротивлению в дросселе 15 возникает давление подпора, которое передается полости управления распределителя 12, переводя его в состояние Заперто. При этом сброс воздуха из штоковой полости пневмоцилиндра 4 в атмосферу прекращается, ползун 1 останавливается. После окончания хода поршня пневмоцилиндра 10(1) давление подпора в магистрали 16 падает, распределитель 12 возвращается в состояние Открыто1.1 Поршень пневмоцилиндра 4 и ползун 1 получают разрешение продолжать движение до встречи кулачка 2 с толкателем следующего датчика 5(2). Поскольку все распределители 11 исполнительных пневмоцилиндров 10, сколько бы их не было, соединены с атмосферой через одну магистраль 16, способ перемещения ползуна 1 командоаппарата повторяется до полной отработки цикла. При нажатии кулачком 2 на толкатель последнего датчика 5(4) (последний такт цикла) одновременно с сигналом к исполнительному пневмоцилиндру 10(2) по линии 24 поступает сигнал в левую полость управления распределителя 9, который, меняя позицию, реверсирует поршень пневмоцилиндра 4 в исходное положение. При этом кулачок 2 свободно прощелкивает толкатели датчиков 5, не нажимая на них. После возврата ползуна } в исходное положение кулачок 2 верхним скосом нажимает толкатель распределителя 8 и воздуха, снова поступая в правую полость управления распределителя 9, переводит его в состояние начала следующего цикла. Скорость обратного хода пневмоцилиндра 4 регулируется дросселем 13.
Пневматическая система управления значительно упрощает конструкцию командоаппарата, сведя ее кинетическую часть к одной подвижной детали - пот- зуну с закрепленным на нем кулачком. Использование общей магистрали сброса воздуха з атмосферу от распределителей исполнительных приводов в качестве обратной связи исключает необ5 1
ходимость в путевых датчиках положения, что существенно упрощает внешний монтаж коммуникаций рабочих органов и удешевляет конструкцию. Отработка полного цикла работы системы за счет одного двойного хода пневмо- цилиндра командоаппарата существенно увеличивает рабочий ресурс пневмоци- линдра и его распределителя, а также уменьшает затраты времени на частые переключения. Отсутствие программоносителя в командоаппарате не снижает способности системы к смене программы, так как любую программу можно получить коммутацией связей между датчиками сигналов и распределителями исполнительных пневмоцилиндров.
Формула изобретения. . Пневматическая4 система управления,
содержащая командоаппарат, связанный с приводом, выполненным в виде пнев
6
моцилиндра, полости которого подключены к управляющему распределителю, распределитель с ручным управлением, связанный с путевым распределителем,
и исполнительные пневмоцилиндры, по
лости которых подключены к распределителям, связанным с датчиками перемещения программного элемента командоаппарата, отличающаяся тем, что, с целью упрощения конструкции, повышения долговечности и быстродействия, она содержит установленный на сбросе в атмосферу из управляющего
распределителя двухлинейный распределитель, управляющая полость которого и выходы слива распределителей исполнительных пневмоцилиндров соединены через регулирующий дроссель с атмосферой общей магистралью, причем камера управления управляющего распределителя подключена к путевому распределителю .
| Система управления пневматическим манипулятором | 1978 |
|
SU943647A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
