Изобретение относится к области автоматического управления и может быть применено в устройствах пневмоавтоматики.
Известен струйный командоаппарат, в котором для отработки периодически повторяющейся программы применена бесконечная перфолента.
К недостаткам известного командоаннарата относится недолговечность бесконечной перфоленты.
Предлагаемый командоаппарат содержит привод и раму для крепления перфокарты п отличается тем, что в нем установлен механизм шагового перемещения, выполненный в виде зубчатой рейки, рядом с которой расположен на неподвижной оси рычаг, связанный с приводом и имеющий два фиксирующих выступа, смещенных один относительно другого на полщага зубьев рейки.
Благодаря предложенной конструкции программоноситель может совершать возвратнопоступательные перемещения относительно считывающего устройства, что позволяет применить перфокарту. В результате долговечность программоносителя увеличивается.
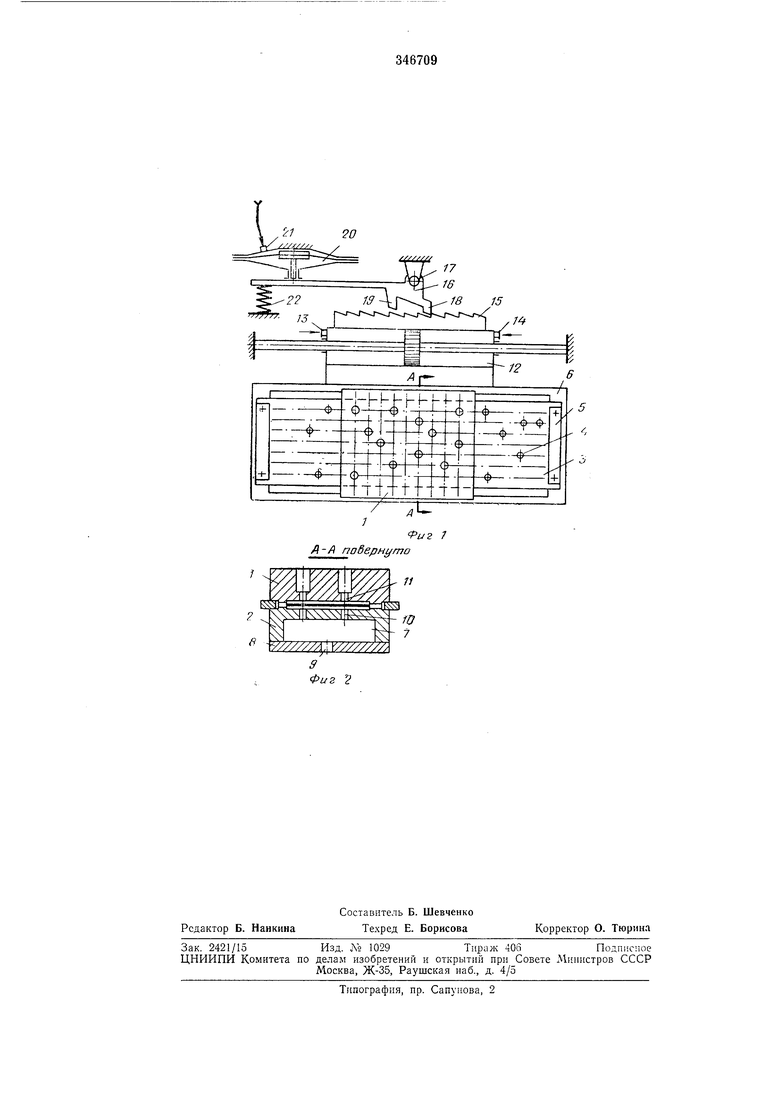
На фиг. 1 схематически изображен предлагаемый командоанпарат, вид в плане; на фиг. 2 - разрез по А-А на фиг. 1.
разуют в месте разъема узкую щель, в которую вставлена перфокарта 3 (фиг. 1) с отверстиями 4, концы которой закреплены с помощью планок 5 на жесткой рамке 6. В нижней плите выполнена полость 7, закрытая крышкой 8 с отверстием 9 для подвода воздуха питания. Отверстия 10 плиты 2, расположенные в несколько рядов в соответствии со строками перфокарты, подводят воздух под
перфокарту. Отверстия // плиты / являются выходными каналами командоаппарата и расположены соосно с -отверстиями 10.
Рамка 6 жестко скреплена с подвижной гильзой пневмоцилиндра 12 с закрепленным
штоком. Пневмоцилиндр имеет два подвода 13 п 14 и служит для периодического пере.мещения рамки с перфокартой на шаг при рабочем ходе и для быстрого возврата ее в исходное положенпе по окончанпи рабочего
цикла. Величина шага перемещения рамки определяется шагом ззбьев рейки 15, который согласуется с перфокартой. Перемещение на шаг обеспечивается с помощью рычага 16, установленного на оси 17 и имеющего
выступы 18 и 19, поочередно фиксирующие при колебаниях рычага зубья рейки 15, прикрепленной к гильзе пневмоцилиндра 12. Приводом колебаний рычага служит мембранная камера 20, на вход 21 которой подапостороннего действия, и для возврата рычага 16 в исходное положение после срабатывания камеры служит нружина 22.
В исходном ноложении рамка 6 максимально сдвинута вправо. Воздух с рабочим давлением подведен к полости 7 плиты 2, а также через подвод 13 в левую полость пневмоцилиндра 12. Правая полость пневмоцилиндра при этом сообщается с атмосферой. Цилиндр развивает усилие, стремящееся переместить гильзу цилиндра вместе с прикрепленными к ней рамкой 6 и рейкой 15 влево. Это усилие воснринимается выступом 18 рычага, фиксирующего зуб рейки 15.
При подаче управляющего сигнала (подаче давления) на вход 21 привода 20 рычаг 16 поворачивается на оси 17 и выступ 18 освобождает зуб рейки. В момент выхода выступа 18 из зацепления выступ 19 рычага достигает такого положения, при котором он может зафиксировать один из зубьев рейки, но так как он находится в этот момент во впадине между зубьями, то гильза цилиндра будет перемещаться до упора соответствующего зуба рейки в выступ 19. Величина хода при этом не превыщает половины шага зубьев рейки. При снятии управляющего сигнала рычаг 16 под действием пружины 22 возвращается в исходное положение, выступ 19 освобождает зуб рейки, а выстуи 18 занимает положение фиксации. Гильза цилиндра вместе с рамкой 6 перемещается еще на полщага зубьев. Таким образом при подаче импульса давления на вход 21 привода 20 перфокарта перемещается на щаг с промежуточной фиксацией через полщага. Положение промежуточной фиксации в качестве рабочего не используется.
В каждом рабочем положении рамки отверстия, пробитые в перфокарте, соединяют выходные каналы 11 с подводящими отверстиями 10. Управляющие сигналы, появив r 346709
шиеся на выходах, поступают в логическую часть системы или непосредственно на усилители исполнительных приводов. Количество сигналов в каждом рабочем положении, т. е.
в каждом такте, определяется программой, записанной с помощью отверстий, пробитых в перфокарте.
После окончания рабочего цикла рамка 6 с перфокартой устанавливается в исходное
положение. Для этого реверсируется пневмоцилиндр, т. е. давление воздуха подается в его правую полость через подвод 14, а левая сообщается с атмосферой. При обратном ходе пневмоцилиндра рейка 15 рычагом 16 не
фиксируется, а его выступы 18 и 19 «прощелкивают зубья рейки, вызывая колебание рычага. Управление пневмоцилиндром 12 программируется на перфокарте командоаппарата. Команда на возврат нерфокарты в исходное положение может быть подана в любом такте, благодаря чему количество тактов в управляемом цикле можно менять от одного до максимально возможного, определяемого длиной перфокарты и конструктивными размерами командоаппарата. Порядок подачи команд и их количество в каждом такте определяются отверстия.ми перфокарты.
Предмет изобретения
Струйный командоаппарат, содержащий привод и раму для крепления перфокарты, установленной в зазоре между двумя плитами с питающими и приемными капалами, отличающийся тем, что, с целью повышения надежности устройства, в нем установлен механизм шагового перемещения, выполненный в виде рейки, закрепленной на раме, и связанного с приводом и закрепленного на неподвижной оси рычага с двумя фиксирующими выступами, смещенными один относительно другого иа полщага зубьев рейки.
A-A пабернуто 7/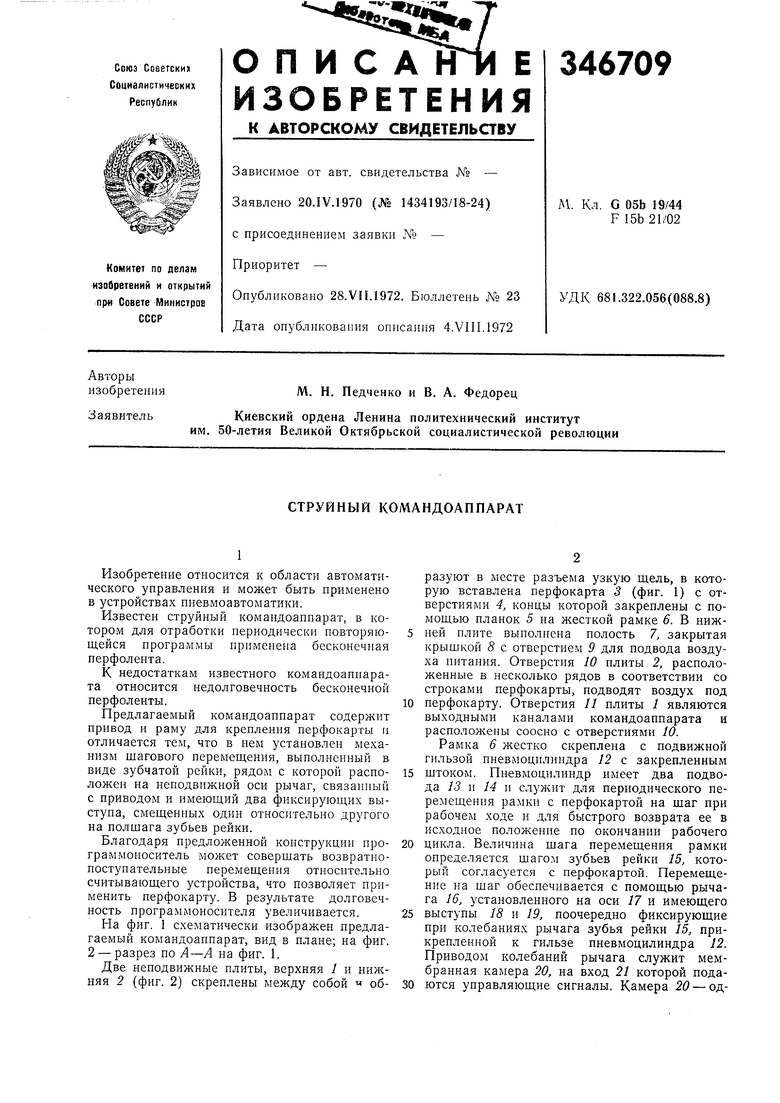
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический командоаппарат | 1976 |
|
SU642680A1 |
| Швейный полуавтомат для шитья по контуру | 1989 |
|
SU1730280A1 |
| Устройство для шаговой подачи полосового материала в рабочую зону пресса | 1975 |
|
SU590047A1 |
| Система управления пневматическим манипулятором | 1978 |
|
SU943647A1 |
| Автомат для сборки | 1987 |
|
SU1428561A2 |
| УСТРОЙСТВО для РАСКРОЯ УЛОЖЕННОГО слоями | 1973 |
|
SU381201A1 |
| Пневмогидравлический цифровой привод | 1980 |
|
SU1038631A1 |
| Пневматический командоаппарат | 1975 |
|
SU572765A1 |
| Пневматический шаговый двигатель | 1970 |
|
SU480856A1 |
| Автомат для сборки | 1985 |
|
SU1391857A1 |