1
Изобретение относится к системам автоматического контроля и регулирования и может быть использовано для измерения перемещения.
В промышленности широко применяют бесконтактные преобразователи перемеш,ений, основанные на использовании эффекта Холла, содержащие интегральную схему с элементом Холла и магнитную систему с неоднородным магнитным полем 1, 2. Микросхема с элементом Холла расположена между полюсами магнитной системы. При относительном перемещении микросхемы и магнитной системы изменяется индукция магнитного поля и соответственно выходное напряжение элемента Холла. Выходные сигналы с элемента Холла подаются на микросхему, которая используется для их обработки и преобразования.
Наиболее близким к изобретению по технической сущности является преобразователь перемещений 3, содержащий две магнитные системы в виде постоянных магнитов или электромагнитов с полюсными наконечниками и датчик Холла, расположенный в зазоре, причем линейность выходной характеристики достигается тем, что зазор преобразователя образован обращенными друг к другу полюсными наконечниками обеих магнитных систем.
Недостаток этих преобразователей состоит в их сложности, связанной с необходимостью создания магнитной системы с соответствующей конфигурацией магниткого поля, а также малый динамический диапазон линейности выходной характеристики преобразователей перемещений.
Цель изобретения - расщирение динамического диапазона линеаризации выходной
характеристики датчика перемещений.
Эта цель достигается тем, что в элемент Холла введены два дополнительных электрода, смещенных относительно его измерительных электродо-в на величину, меньшую
половины элемента Холла, при этом два одноименных вывода дополнительных и измерительных электродов соединены между собой, а два других подключены к входу усилителя, выход которого последовательно
соединен с компаратором и регулятором тока.
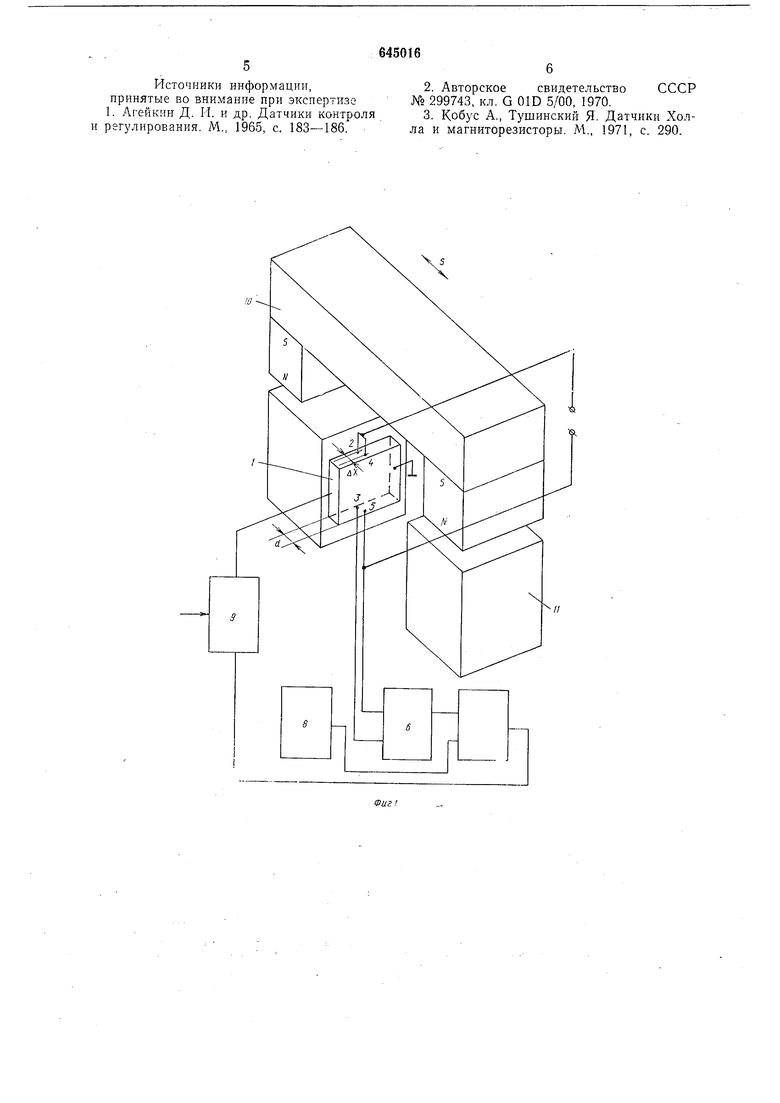
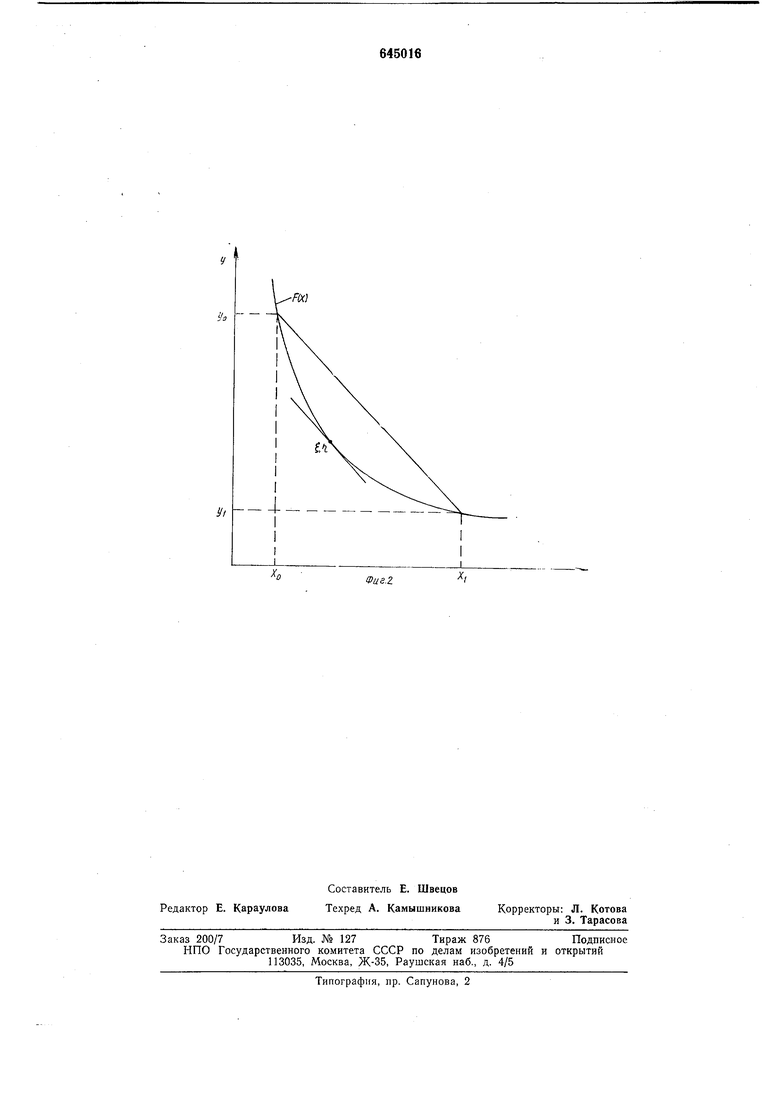
На фиг. 1 представлена блок-схема предлагаемого устройства; на фиг. 2 - выходная характеристика элемента Холла.
Устройство линеаризации выходной характеристики датчиков перемещений содержит элемент Холла 1, два дополнительных электрода 2, 3, смещенных относительно измерительных электродов 4, 5, на величину АХ -, где d - тол1Ц1ша элемента Холла, двухканальный усилитель 6, компаратор 7, один вход .которого С1осди)1ен с источником 8 эталонного на-пряжения, регулятор 9 тока. Устройство,работает следующим образом. При перемещении контролируемого объекта, на котором укреплена система из постоянных магнитов 10, изменяется величина Магнитной индукции магнитного концентратора 11, внутри которого расположен элемент Холла. В результате изменяется выходное напряжение элемента Холла. Линеаризация выходной характеристики датчика неремещения осуществляется нутем автоматического поддержаиия заданной чувствительности датчика перемещений. В результате смещения дополнительных электродов 2, 3 относительно измерительных электродов 4,5 на величииу получается смещение выходных характеристик, снимаемых с измерительных и дополнительных электродо элемента Холла одна относительно другой иа величину Х (см. фиг. 2). Величина квантования AJ выбирается из заданной величины относительной погрешности кусочно-линейной аппроксимации выходной характеристики элемента Холла. Если F (X -выходная характеристика элемента Холла, а Ао, Уо - точка на кривой F(X), то требуется выбрать вторую точку Xi, У на кривой такую, чтобы хорда, проходящая через эти две точки, отклонялась от кривой F(X) не более чем на |, ц. Обозначим через I, г| точку кривой F(X, максимально удаленную от хорды, соединяющей точки Ji, У и Хй, Уо- Так как кривая F(X) не содержит точки нерегиба, то касательная к кривой в точке |, г| должна быть параллельна хорде. Уравнение хорды и касательной соответственно У КХ+Ь-(1) У КХ + В.(2) У1-У А, Ь Уо - Xf Хд . Расстояние между хордой (1) и касательной (2) Так как эта величина является максимальным удалением кривой X от хорды, то / - - - е гГГя .Решая это уравнение, получаем l/8s /TTlg l . Р (о) 1 Чем больше заданная погрешность аппроксимации, тем больше шаг квантования может быть выбран. Соединяя одпо1 менные концы измерительных и дополнительных электродов, на выходе измерительного и дополнительного электродов получаем разность напряжений координат характеристик, отнесенную к величине смещения указанных электродов, т. е. получаем значение чувствительноети 5 , Эта чувствительность, предварительно усиленная двухканальным усилителем 6, подается на компаратор 5, в котором она сравнивается с постоянным уровнем, равным заданной чувствительности, задаваемым от эталонного источника 8. При изменении неинформативного параметра, например температуры окружающей среды, изменяется напряжение на выходных электродах элемента Холла. Это изменение напряжения приводит к изменению утла наклона выходных характеристик, т. е. изменяется величина реальной чувствительности. В реззльтате сравнения нового значения реальной чувствительности с эталонным уровнем чувствительности, задаваемым от эталонного 8 источника, выделяется разность напряжений, которая подается иа регулятор 9. Регулятор тока отрабатывает ошибку от погрешности неинформативного параметра, нриводя таким образом к компенсации изменений напряжений на выходных электродах элемента Холла. Это означает, что реальная чувствительность датчика перемещений остается постоянной во всем д гнамическом диапазоне, т. е. выходная характеристика получается линейной. Формула и 3 о б р е т е и и я Устройство линеаризации выходной характеристики датчика перемещений, содержащее подвижной п неподвижный магннтопроводы с источником МДС, в зазорах которых установлен элемент Холла, подключенный к регулятору тока, усилитель и компаратор, от л и ч а ю ще е-е я тем, что, с елью расширения динамического диапазбиа ;пгнеаризации выходной характеристики датчика перемещений, в элемент Холла введены два дополнительных электрода, смеН1,енных относительно его измерительных электродов на величи 1у, меньшую полови-ны ТОЛ1ЦИНЫ элемента Холла, при этом два oднoп ieIп ьтx вывода измерительных п доГ;олннтсл 11ых электродов соединены между собой, а два других подключены к входу еилителя, выход которого последователь1Ю сосдине г с компаратором и регулятором тока.
Источники информации, принятые во внимание при экспертизе 1. Агейкин Д. И. и др. Датчики контроля и регулирования. М., 1965, с. 183-186.
2.Авторское свидетельство СССР № 299743, кл. G 01D 5/00, 1970.
3.Кобус А., Тушинский Я. Датчики Холла и магниторезисторы. М., 1971, с. 290.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения параметров магнитного поля | 2018 |
|
RU2696058C1 |
| Способ измерения магнитного поля и устройство для его осуществления /его варианты/ | 1980 |
|
SU958991A1 |
| ИНТЕГРАЛЬНЫЙ МАГНИТОТРАНЗИСТОРНЫЙ ДАТЧИК С ЦИФРОВЫМ ВЫХОДОМ | 2009 |
|
RU2437185C2 |
| Способ измерения концентрации парамагнитного компонента в газовой среде | 1979 |
|
SU1126858A1 |
| Компенсационный магнитометр холла | 1977 |
|
SU691790A1 |
| Магнитоанизотропный датчик механических усилий | 1986 |
|
SU1318810A1 |
| Устройство для измерения малыхуглОВ НАКлОНА | 1979 |
|
SU838336A1 |
| Управляемый измерительный генератор | 1983 |
|
SU1109851A1 |
| МОДУЛЬНАЯ УНИВЕРСАЛЬНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА БЕЛАШОВА | 2009 |
|
RU2394339C1 |
| Устройство для линеаризации характеристик измерительных преобразователей | 1979 |
|
SU894747A1 |
-Ш
Фиг.г
