(54) УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАЛЫХ УГЛОВ НАКЛОНА
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухкоординатный наклономер | 1979 |
|
SU838339A1 |
| Устройство для эталонированияСЕйСМОНАКлОНОМЕРА | 1979 |
|
SU830272A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ГРАВИТАЦИОННОГО И ВОЛНОВОГО ПОЛЕЙ | 2003 |
|
RU2260199C2 |
| СПОСОБ ИЗМЕРЕНИЯ СИЛЫ ТОКА В ПРОВОДНИКЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2453853C2 |
| БЕСКОНТАКТНЫЙ ПРОГРАММИРУЕМЫЙ ДАТЧИК АБСОЛЮТНОГО УГЛОВОГО ПОЛОЖЕНИЯ В 360° | 2006 |
|
RU2312363C1 |
| ПРОГРАММИРУЕМЫЙ БЕСКОНТАКТНЫЙ ДАТЧИК УГЛОВОГО ПОЛОЖЕНИЯ С ЛИНЕЙНЫМ УГЛОВЫМ ДИАПАЗОНОМ В ПРЕДЕЛАХ 360° | 2006 |
|
RU2317522C2 |
| Преобразователь углового положения объекта | 1982 |
|
SU1067358A1 |
| СИЛОИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 2005 |
|
RU2296306C2 |
| Микробарограф | 1979 |
|
SU847090A1 |
| Устройство для измерения температурного коэффициента постоянного магнита | 1985 |
|
SU1267309A1 |
I
Изобретение относится к контрольно-измерительной технике, а именно к устройствам для измерения и контроля малых углов наклона Ъбъектов относительно плоскости горизонта.
Известен датчик угла наклона, содержащий корпус, инерционную массу, подвешенную на тягах, точка пересечения которых совмещена с центром тяжести инерционной массы, и дифференциальный преобразователь, образованный тензорезисторами, являющимися составной частью тяг.
Датчик позволяет проводить измерения как при больших, так и при малых (до 5°) диапазонах измеряемых углов 1.
Однако такие датчики не обладают достаточной точностью при малых изменениях угла наклона объекта.
Наиболее близким техническим решением к предложенному является устройство для измерения углов наклона, содержащее корпус, постоянный магнит, одностепенной физический маятник, датчик Холла и измерительный прибор. Известное устройство позволяет повысить точность измерений углов наклона и автоматизировать процесс измерений 2.
Однако устройство имеет недостаточную точность измерения малых углов наклона из-за ошибок, вызываемых временным и температурным дрейфом составных частей устройства, низкую разрешающую способность и чувствительность при измерении малых углов наклона.
Цель изобретения - повышение точности измерения путем исключения температурного и временного дрейфа.
Поставленная цель достигается тем, что устройство снабжено дифференциальной магнитной системой, выполненной в виде закрепленных в нижней части маятника двух квадрупольных магнитных линз, в зазоре каждой из которых помещен датчик Холла, установленный на основании корпуса в вертикальной плоскости, перпендикулярной оси качания маятника, при этом выходные электроды датчиков Холла соединены последовательно и подключены к измерительному прибору.
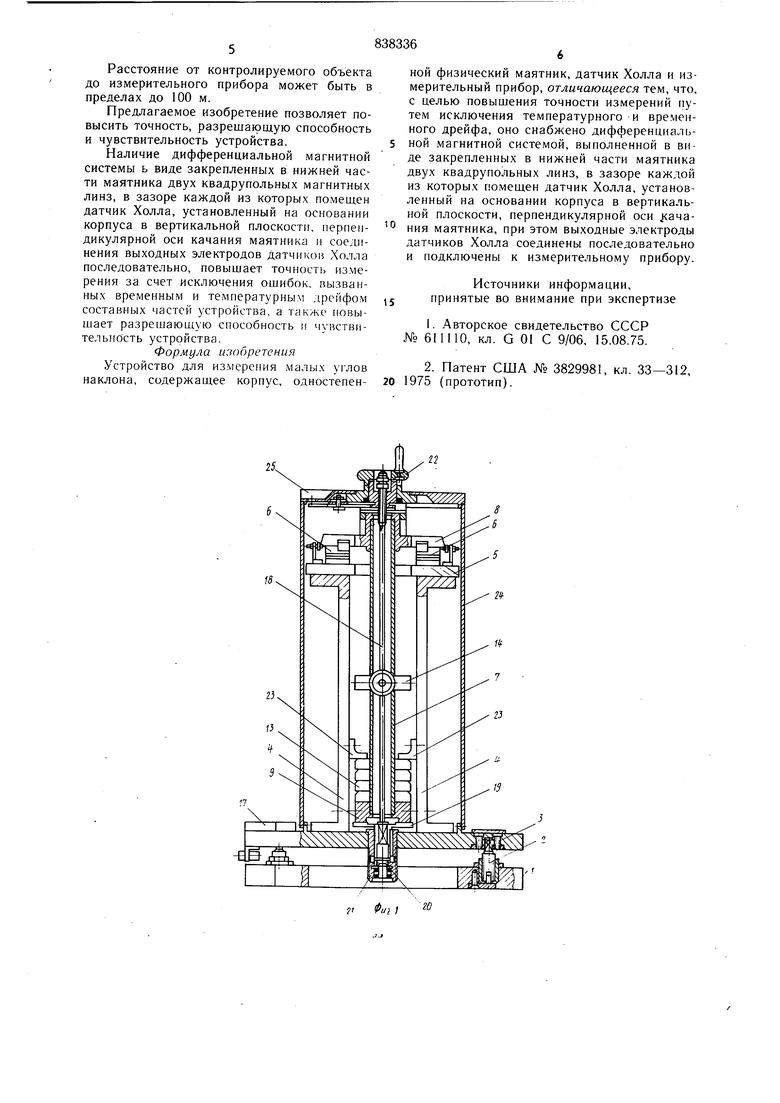
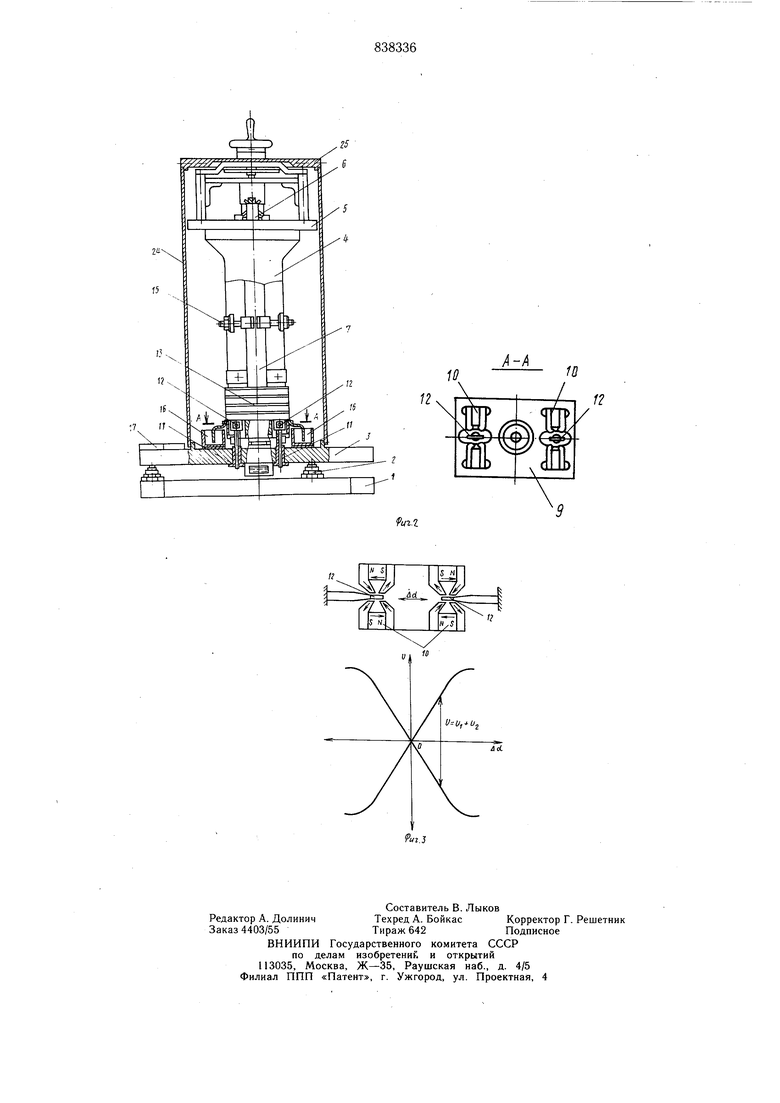
На фиг. 1 изображено устройство для из0мерения малых углов наклона, вид сбоку; на фиг. 2 - то же, вид спереди; на фиг. 3 - дифференциальная магнитная система и ее выходная характеристика. У1-гр. содержит плиту 1, на которой n;i грчх /стаиовочных винтах 2 закреплено основание корпуса 3. На основании 3 3aiq)CH.icnbi две вертикальные стойки 4, верхние торцы которых скреплены круглой плитой 5, ка кото|1()п установлены две опорные призм 6. Полый маятник 7 онорпыми ножками 8 установлен на призмах 6. В нижней части маятника закреплена обойма 9, в которой установлены две квадрупольные магнитные линзы 10. На основании 3 закреплены два держателя II с датчиками Холла 12, установленные в рабочих зазорах квадрупольных линз 10. Две квадрупольные линзы 10 и два датчика Холла 12, выходные электроды которых соединены последовательно, образуют дифференциальную магнитную систему. Для понижения центра тяжести маятника 7 в его нижней части закреплен груз .13. В средней части маятника 7 закреплен балансир 14 с регулировочными гайками 15. Жидкостные демпферы 16 гасят колебания маятника 7. На основании 3 расположены под прямым углом две плопдадки 17 для контрольного уровня. Арретирующее устройство состоит из штока 18, прижима 19, пружины 20, установленной во втулке 21, рукоятки 22 и опорных уголков 23. На основании 3 установлен кожух 24 с верхней крышкой 25. Устройство позволяет проводить контроль объектов относительно плоскости горизонта или начального положения объекта. Устройство работает следующим обра;«)м. При принятии за начало объекта плоскости горизонта устройство устанавливается на любое основание, выставленное по уровню в горизонтальное положение. Установочными винтами 2 основание 3 но контрольному уровню устанавливается в горизонтальное положение. Устройство разарретируется. Вращением рукоятки 22 перемеп.1ается шток 18, при этом прижим 19 сжимает пружину 20, маятник 7 опорными ножами устанавливается на опорные прижимы 6, а датчики Холла входят в рабочий зазор квадрупольных линз 10. На входные электроды датчиков Холла от источников питания подается электрический ток. К выходу датчиков Холла подключается любой стандартный электроизмерительный прибор (не показан). Вращением регулировочных гаек 15 балансира 14 показания электроизмерительного прибора устанавливаются равным нулю. В рабочем зазоре каждой квадрупольной магнитной линзы 10 протекают два магнитных потока во взаимно, противоположных направлениях (фиг. 3). При установке нуля по электроизмерительному прибору каждый преобразователь Холла 12 устанавливается таким образом, что одна его половина пронизывается магнитным потоком в одном направлении, а вторая в другом, т. е. в датчике Холла устанавливается электрический баланс, при котором его выходное напряжение равно нулю. Магнитная характеристика каждой из двух квадрупольных линз 10 изодинамическая. Выходная характеристика напряжения дифференциальной магнитной системы поканаза на фиг. 3. Выходное напряжение дифференциальной магнитной системы с двумя датчиками Холла, выходные электроды которых соединены последовательно, равно сумме выходных напряжений каждого дат-чика Холла (U Ui + Ujj.). Выходные напряжения датчиков Холла разной полярности могут быть получены соответствующей установкой квадрупольных линз 10 или подключением входных электродов датчиков Холла к источнику питания разной полярности. При наклоне объекта относительно плоскости горизонта вместе с ним происходит наклон плиты 1 с основанием 3 относительно маятника 7, что приводит к смещению датчиков Холла 12 относительно магнитной оси квадрупольных линз 10. Выходное напряжение дифференциальной магнитной системы пропорционально величине механического перемещения датчи Холла, а полярность и характер изменения этого напряжения показывает направление перемещения контролируемого объекта. Компенсация влияния временного и температурного дрейфа элементов устройства при изменении внещних условий (изменение температуры, внешнего магнитного поля. и д. т.) осуществляется дифференциальной магнитной систем.ой. Изменение напряжения каждого датчика Холла происходит во взаимно противоположных направлениях, а так как датчики Холла включены последовательно, то появившиеся ошибки напряжения взаимно компенсируются, и выходной сигнал остается без изменений. Устройство позволяет подавать выходной сигнал на измерительный прибор и одновременно на исполнительный механизм автоматических систем управления и регулирования или систему автоматической регистрации. При выполнении кожуха 24 из свинца устройство может использоваться для проведения измерений в условиях повыщенной радиации. При необходимости переноса устройства на другой объект, устройство арретируетСя вращением рукоятки 22. Устройство обеспечивает измерение угловых перемещений от О до 0,5° с угловой чувствительностью 1 сек. Температурная погрешность в интервале комнатных температур не более 0,05%.
Расстояние от контролируемого объекта до измерительного прибора может быть в пределах до 100 м.
Предлагаемое изобретение позволяет повысить точность, разрешающую способность и чувствительность устройства.
Наличие дифференциальной магнитной системы ь виде закрепленных в нижней части маятника двух квадрупольных магнитных линз, в зазоре каждой из которых помещен датчик Холла, установленный на основании корпуса в вертикальной плоскости, перпендикулярной оси качания маятника и соединения выходных электродов Датчике) Холла последовательно, повышает точность измерения за счет исключения ошибок, вызванных временным и температурным дрейфом составных частей устройства, а также повышает разрешающую способность и чувствительность устройства.
Формула изобретения
Устройство для измерения малых углов наклона, содержащее корпус, одностепен-т
ной физический маятник, датчик Холла и измерительный прибор, отличающееся тем, что, с целью повышения точности измерений путем исключения температурного и временного дрейфа, оно снабжено дифференциальной магнитной системой, выполненной в виде закрепленных в нижней части маятника двух квадрупольных линз, в зазоре каждой из которых помещен датчик Холла, установленный на основании корпуса в вертикальной плоскости, перпендикулярной оси .качания маятника, при этом выходные электроды датчиков Холла соединены последовательно и подключены к измерительному прибору.
Источники информации, принятые во внимание при экспертизе
1, Авторское свидетельство СССР № 611110, кл, G 01 С 9/06, 15.08,75.
2, Патент США № 3829981, кл. 33-312, 20 1975 (прототип).
22
20
Фиг
.15
Л
(
/
/
Х-/1
и
г/
/
X
f
/
и
СМ) (ф
