(5) УСТРОЙСТВО для ЛИНЕАРИЗАЦИИ ХАРАКТЕРИСТИК ИЗМЕРИТЕЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Интерполятор | 1984 |
|
SU1206805A1 |
| Генератор функций | 1984 |
|
SU1241219A1 |
| Генератор функций | 1984 |
|
SU1275411A1 |
| Число-импульсное линеаризующее устройство с масштабированием | 1983 |
|
SU1109759A1 |
| Цифровой квадратичный интерполятор | 1985 |
|
SU1290354A1 |
| Цифровое устройство для линеаризации характеристики измерительных преобразователей | 1981 |
|
SU1015391A2 |
| Функциональный преобразователь | 1983 |
|
SU1166147A1 |
| Гибридный функциональный преобразователь | 1982 |
|
SU1582190A1 |
| СИСТЕМА И СПОСОБ ЛИНЕАРИЗАЦИИ УСИЛИТЕЛЯ МОЩНОСТИ | 2010 |
|
RU2433522C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ РАСХОДА ГАЗА | 2005 |
|
RU2309447C2 |
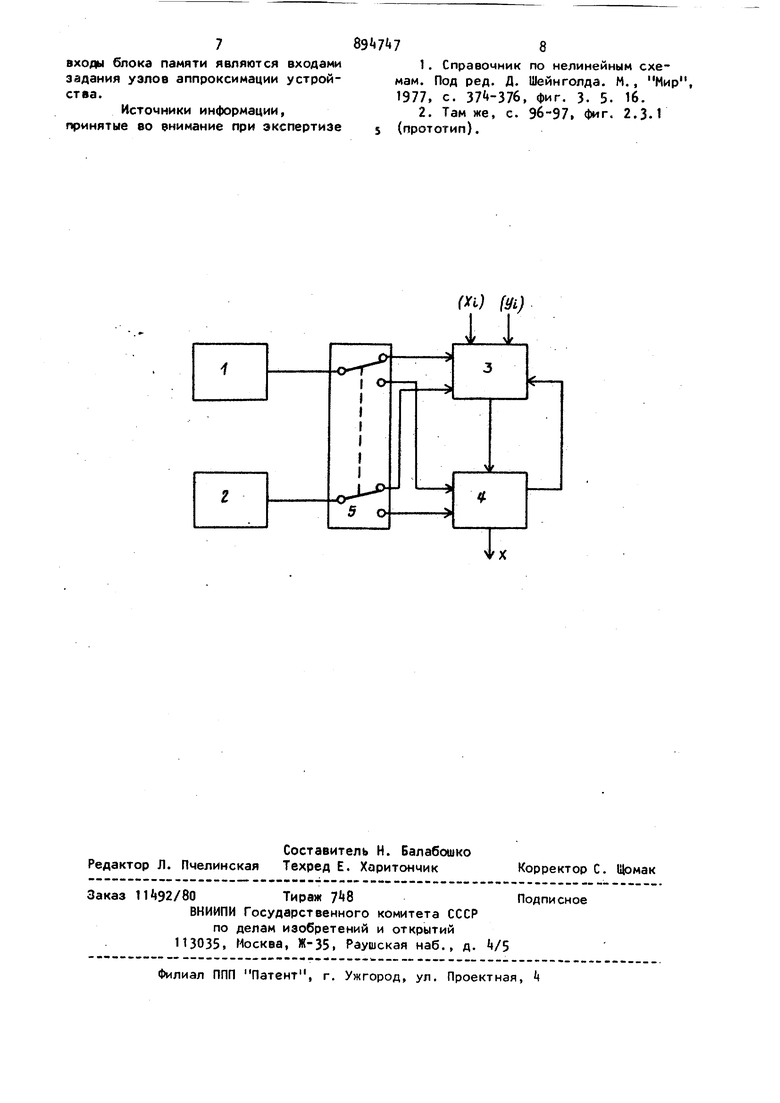
I Изобретение относится к измерительной технике. Известно устройство для линеаризации характеристик измерительных пр образователей, содержащее датчик, ин тегратор, компаратор, переключатели, цифроаналоговый преобразователь, бло памяти, счетчик, блок логики и индикации, которое осуществляет преобрааование сигнала аналогового датчика в цифровой код 1. Наиболее близким к предлагаемому ;Является устройство для линеаризации характеристик измерительных преобразователей, содержащее датчик и блок интерполяции, выход которого является выходом устройства, предусилитель включенный между выходом датчика и входом задания преобразуемого параметра вычислительного блока 2. Недостаток известных устройств наличие дополнительной погрешности, обусловленной влиянием на характеристики датчика второстепенного (косвенного) параметра исследуемой среды. Цель изобретения - повышение точности устройства. Поставленная цель достигается тем, что устройство для линеаризации характеристик измерительных преобразователей, содержащее датчик, блок интерполяции, выход которого является выходом устройства, дополнительно содержит компенсирующий датчик, блок памяти и сдвоенный переключатель режимов, подвижные контакты первой и второй контактных групп которо го соединены соответственно с выходами основного и компенсирующего датчиков, первые неподвижные контакты первой и второй контактных групп сдвоенного переключателя режимов сое динены соответственно со входом формимирования адреса основного параметра и входом формирования адреса компенсирующего параметра блока памяти, вторые неподвижные контакты первой и второй контактных групп сдвоенного переключателя режимов соединены соо ветственно .со входом задания основного параметра и входом аадания ком пенсирующего параметра блока интерполяции, адресный выход блока интер поляции соединен с адресным входом блока памяти, информационный выход которого соединен со входом задания узлов аппроксимации блока интерполя ции, информационные входы блока памяти являются входами задания узлов аппроксимации устройства. На чертеже приведена бпок-схема устройства. Устройство содержит основной 1 и компенсирующий 2 датчики, блок 3 памяти, блок 4 интерполяции и сдвоенный переключатель 5 режимов. Предлагаемое устройство работает следующим образом. Предварительно калибруют основной 1 и компенсирующий 2 датчики в диапа зонах изменения исследуемого X и кос венного Y параметров, установив переключатель 5 в верхнее положение. Калибровка характеризуется следующей совокупностью технологических операций: -поочередно устанавливают значения X. и YJ параметров эталонной среды в узловых 1,-ых точках диапазона их изменения, контролируя их величину с помощью эталонных измерительных приборов; -измеряют установленные параметры X и Yi с помощью основного 1 и компенсирующего 2 калибруемых датчиков, помещая их в измерительную среду, и получают с их выходов соответственно величины и V-,,j , -фиксируют закодированные значения контрольного параметра X; выходного параметра U;,. линеаризуемого датчика 1 и выходного параметра , компенсирующего датчика 2 в ячейке с адресом IJ блока 3 памяти. При выполнении рабочих измерений параметра X исследуемой среды переключатель 5 переводят в нижнее положение. Затем помещают чувствительный эле мент основного датчика 1 в исследуемую среду. Туда же помещают чувствительный элемент компенсирующего датчика 2 для измерения значения косвенного параметра Y. На выходах основного 1 и компенсирующего 2 датчиков имеют место параметры U и V. 4 Параметры U и V подаются на вычислительный блок i, в котором по их значениям определяется начальный адрес Ij, обеспемивающий выбор из блока 3 памяти значений U;, V „ d 1 j J-ij ij. V, Эти пары значеНИИ являются координатами точек треугольника, площадью которого накрывается точка с координатами U и V. В выбранной зоне осуществляется интерполяция значения X по известным значениям U, V, ,,-, 3 iMj (j, и j4, . и ординатам X, и нэ основе кусочно-плоскостной аппроксимации по выражению ,. где ,. v, ., uU.u-u. -и,. 3 -. описывающему алгоритм работы блока l. Следует отметить что для получения скорректированных значений X могут быть использованы вычисления с использованием аппроксимирующих функций (Х, Y, ,X, Y); Y;,,X, Y);(3) ЧГ|(Х;|, V где X - текущие значения параметров измеряемой среды{ и и V- значения выходных величин датчиков 1 и 2; X,Yj, Ujj , - значения входных и выходных ; величин датчиков 1 и 2, полученных при калибровке. В частности X может быть вычислено по аналитической зависимости, полученной из (23 и (З) в результате следующих преобразований; .Ч. 3. Ь. , Yj, . X, Y.-MX,, Vi3,v1j. откуда X ,. , Yj, Ui, U, Ч (X,-, , V)3 , Y, U., V, U, Vj с 13 ij . Зависимость С), полученная из конкретных аппроксимирующих функций 2 и 3 может служить основой и для аппаратной и для программной реализации блока .
Для реализации вычислительного бл ка 4 могут использоваться методы еледящего или развертывающего уравновешивания правых и левых частей равенств (2) и (3). При этом известными величинами являются U и V, а искомыми - X и Y. При реализации блока tt на ЦВМ целесообразно использовать итерационные методы поиска значений X и Y, одновременно удовлетворяющих равенствам {2) и (З), которые поочередно проверяются при уточнении X и Y.
Однако наиболее просто блок реализуется, если в процессе калибровки датчиков 1 и 2 получают табличную зависимость вида
Х, У(и. Vj)(5)
В этом случае при калибровке задаются значения U и V;, которые должны &91ть на выходе датчиков t и 2, а . входные параметры X и Y подбирают так, чтобы получить заданные U и Vj
Таким образом, можно получить заданный закон разбиения области воспроизведения функции (например с равномерным шагом).
Процесс калибровки усложняется, но аппроксимирующая зависимость
X 4(и, . V|. Ху , и. у) значительно прЬще, чем (ч) и может быть легко вычислена как аналоговыми так и цифровыми средствами. Отметим, что табличная зависимость вида (5) может быть получена также расчетным путем из (2) и(3).
Предлагаемое устройство для линеаризации характеристик из юрительных преобразователей позволяет более точно измерять параметры объектов, чем известное, за счет у «ньшения побочного влияния косвенного параметра. Для целого ряда датчиков (давления, расхода, температуры, вязкость и т.д.), особенно подверженных влиянию вторичных параметров, это имеет важное значение и предлагаемое устройство позволяет в несколько раз повысить точность линеаризации их характеристик.
Устройство может эффективно применяться в системах с двумя датчиками, на характеристики которых взаимно влияют измеряемые параметры, т.е. в системах, где параметр Y является косвенным для X, а X - косвенным для Y. В этом случае истинные значения второго измеряемого параметра Y дычисляются по той же зависимости.
.что и X, но с использованием вместо узлового значения Y|j , которое также (1я4ксируется в блоке памяти устройства при калибровке. Вычисление X и У при двух параметрических измерениях может быть осуществлено последовательно или параллельно во времени в зависимости от конкретной реализации интерполятора.
Кроме того, предлагаемое устройство может быть реализовано как аналоговыми, так и цифровыми средствами, что позволяет использовать его при построении датчиков и изме- . рительных преобразователей, применяемых практически во всех областях техники.
Применение предлагаемого устройства в сочетании с современными средствами микроэлектронной вычислительной техники позволяет создавать высококачественные измерительные, информа1 ионные и управляющие .системы.
Формула изобретения
Устройство для линеаризации характеристик измерительнь х преобразоаателей, содержащее датчик и блок интерполяциям, выход которого является Bbixc/iOM устройства, отличав щ е е с я тем, что, с целью :повышения точности, оно содержит компенсируюу ий датчик, блок памяти и сдвоенный переключатель режимов, подвижные контакты первой и второй контактных групп которого соединены соответстаекно с выходами основного и компенсирующего датчиков, первые неподвижные контакты первой и второй контактных групп сдвоенного переключателя режимов соединены соответственно со входом формирования адресе основного параметра и входом формирования адресе компенсирующего парамет- ра блока помяти, вторые неподвижные контакты первой и второй контактных групп сдвоенного переклю -:ателя режимов соединены соответственно со входом задания основного параметра блока интерполяции и входом задания компенсирующего параметра, адресный выход блока интерполяции соединен с адресным входом блока памяти, инфор мационный выход которого соединен со входом задания узлов аппроксимации блока интерполяции, информационные 7 входы блока памяти являются входами задания узлов аппроксимации устройства. Источники информации, принятые во внимание при экспертизе 89i7«78 1, Справочник по нелинейным схемам. Под ред. Д. Шейнголда. М., Мир, 1977, с. 37«-376, фиг. 3. 5- 16. 2. Там же, с. 9б-97, фиг. 2.3.1 5 (прототип).
