(54) УСТАНОВКА ДЛЯ МОНТАЖА ФУНДАМЕНТОВ
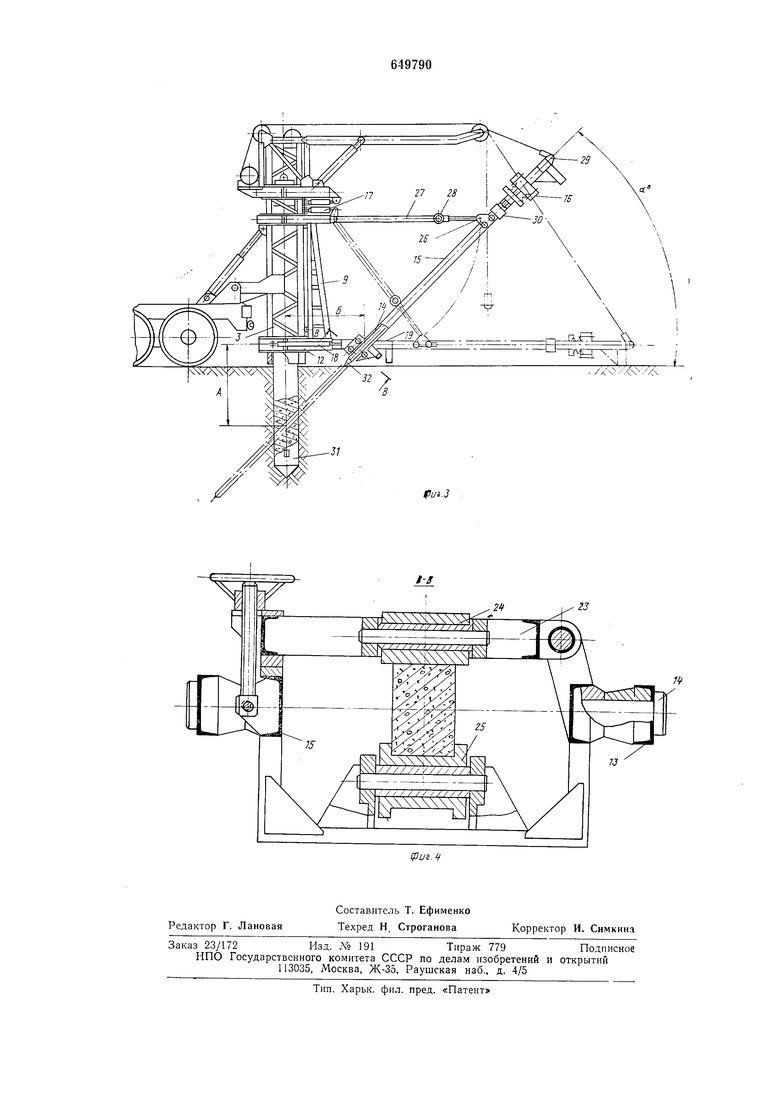
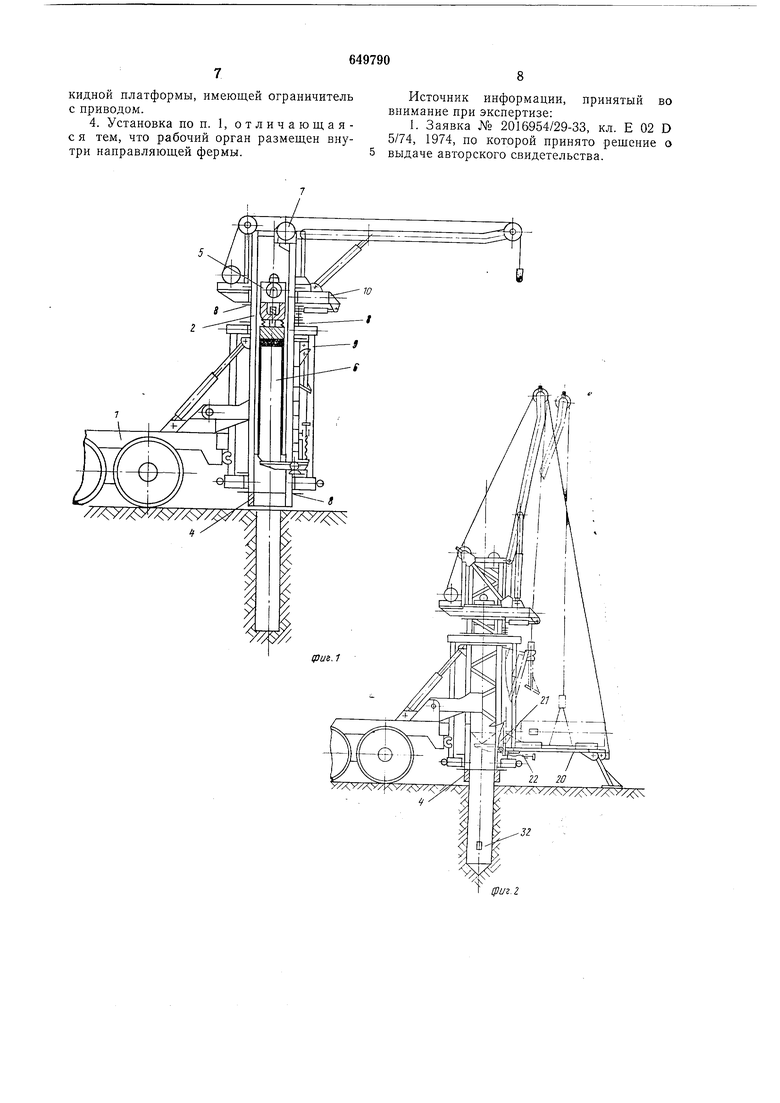
размещенной в нижней ее части, со стороны базовой машины, откидной стенкой-упором 4. Внутри направляющей фермы 2 находится рабочий орган для образования скважины, представляющий соединенные между собой вибромолот 5, грунтонос 6 и лебедку 7.
Снаружи направляющей фермы 2 закреплены три кольцеобразные направляющие 8, в двух ИЗ которых смонтирована поворотная каретка Я а в третьей смонтирован грузоподъемный стреловой механизм 10, соединенный с направляющей фермой 2 силовым цилиндром 11. Поворотная каретка 5 в нижней части имеет телескопическую распорку 12 с выдвижной секцией 13, к которой посредством шарнира 14 присоединено устройство 15 для погружения анкеров, содержащее вибромолот 16.
Направляющая ферма 2 и выдвижная секция 13 соединены с поворотной кареткой 9 силовыми механизмами, например, гидроцилиндрами, соответственно, 17 и 18.
Со стороны загрузочного окна 3 к направляющей ферме 2 шарнирно присоединен ложемент 19, состоящий из откидной платформы 20, имеющей подпружиненный ограничитель 21 с приводом 22.
В нижней части устройства 15 для погружения анкеров шарнирно укреплена фиксируемая рамка 23 со смонтированным в ней блоком 24 прижимных роликов и выполпенный с ребордами поддерживающий ролик 25, которые образуют центратор.
Устройство 15 для погружения анкеров снабжено ползунами 26, которые шарнирно соединены с телескопической тягой 27, имеющей зажимы 28 и шарнирно присоединенной к поворотной каретке 9 проущиной 29, которая соединена с тросом грузоподъемного стрелового механизма 10, а также упорами-фиксаторами 30.
Поперечное сечение грунтоноса 6 выполнено с размерами, обеспечивающими получение котлована, размеры поперечного сечения которого обеспечивают в свою очередь погружение фундаментной стойки 31 с требуемым натягом.
/
Указанные на чертежах буквенные линейные и угловые размеры характеризуют следующие понятия:
размер А - расстояние от точки пересечения оси соответствующего проходного отверстия в фундаментной стойке 31 с вертикальной осью самой фундаментной стойки до горизонтальной плоскости, проходящей через ось шарнира 14;
размер Б - расстояние от вертикальной оси фундаментной стойки 31 до точки пересечения оси шарнира 14, перпендикулярной плоскости чертежа, с осью анкера 32, расположенного в устройстве 15 для погружения анкеров;
угол а - угол между поверхностью грунта и осью анкера 32, расположенного в устройстве 15 для погружения анкеров.
Таким образом, отрезки Л и 5 есть катеты прямоугольного треугольника, концы которых соединяет гипотенуза, совпадающая
с осью анкера 32, который расположен под
заданным углом а.
Это обеспечивает попадание анкера 32 в подземной части фундаментной стойки 31. Размеры Л и для вертикальной плоскости, перпендикулярной рассмотренной выше, будут отличными из-за разного расположения второго проходного отверстия в фундаментной стойке 31, а угол а может быть как разным, так и одинаковым.
Размер Л выдерживается при погружении фундаментной стойки 31 на заданную глубину, обеспечиваемую путем воздейстВИЯ стенки упора 4 на рабочий орган.
Размер Б обеспечивается перемещением выдвижной секции 13 под воздействием гидроцилиндров 18 на величину, которая отмечена каким-либо ориентиром (риской) на выдвижной секции.
Угол а выдерживается следующим образом. При горизонтальном положении устройства 15 для погружения анкеров освобождают зажимы 28 телескопической тяги 27, выставляют ее длину на определенную, соответствующую требуемому углу величину, которая отмечена каким-либо ориентиром (риской). Это иоложение фиксируют зажимами 28. При перемещении устройства для погружения анкеров в вертикальной плоскости подвижные ползуны 26 упираются в постоянно закрепленные упорыфиксаторы 30 и фиксируются ими.
Установка работает следующим образом.
Па месте производства работ по монтажу фундамента направляющую ферму 2
устанавливают в рабочее положение. Цилиндрами 11 и 17 поворачивают грузоподъемный стреловой механизм 10 и поворотную каретку 9 на 90°, освобождая область пространства для перемещения ложемента 19. При помощи грузоподъемного стрелового механизма 10 опускают устройство 15 погружения анкеров на грунт и, не доводя несколько его конец до грунта, выставляют размер Б. Освобождают трос грузоподъемного стрелового механизма 10 от проушины 29 и поворачивают грузоподъемный стреловой механизм 10 в положение, обеспечивающее перемещение с его помощью ложемента 19. Затем присоединяют
трос грузоподъемного стрелового механизма 10 к ложементу 19. Действуя приводом 22 освобождают ограничитель 21 и при поглощи лебедки 7 опускают вибромолот 5, соединенный с грунтоносом 6 до упора режущей кромки последнего в грунт.
Далее включают вибромолот 5 и производят погружение грунтоноса 6 на требуемую глубину, которая выдерлчивается за счет воздействия стенки-упора 4 на рабочий орган. Затем при помощи лебедки 7 поднимают вибромолот 5 и заполненный грунтом грунтонос 6 до тех пор, когда ограничитель 2J под воздействием п-ружины займет свое исходное положение, при котором ось грунтоноса 6 перпендикулярна опорной поверхности ограничителя 21.
Это положение фиксируют приводом 22, отсоединяют грунтонос 6 от вибромолота 5 и при помощи грузоподъемного стрелового механизма 10 переводят ложемент 19 с грунтоносом 6 в горизонтальное положение. Далее отсоединяют трос грузоподъемного стрелового механизма 10 от ложемеита 19 и присоединяют определенным образом к грунтоносу 6, который затем при помон1,и грузоподъемного стрелового механизма 10 снимают с ложемента 19. Отсоединяют трос грузоподъемного стрелового механизма 10 от грунтоноса 6. При помощи грузоподъемного стрелового механизма 10 па ложемент 19 укладывают фундаментную стойку 31 так, чтобы ее лидерный конец касался опорной поверхности ограничителя 21, при этом положения отверстий в фундаментной стойке 31 соответствуют требуемому расположению анкеров 32, погружаемых в грунт. Потом присоединяют трос грузоподъемного стрелового механизма 10 к ложементу 19 и перемещая его, заводят фундаментную стойку 31 внутрь направляющей фермы 2. С помощью привода 22 освобождают ограничитель 21, и фундаментная стойка 31 под собственным весом опускается в створ катлована, при этом фундаментная стойка 31 самоцентрируется в направляющей ферме 2.
Вибромолот 5 закрепляют на фундаментной стойке 31 и, включив его, производят погружение фундаментной стойки 31 на требуемую глубину. По окончании погружения фундаментной стойки 31 направляющая ферма 2 оказывается сцентрированной на ней, так как заданная часть последней остается внутри направляющей фермы 2. Отсоединив вибромолот 5 от фундаментной стойки 31, поднимают его в верхнее положение, при этом подпружиненный ограничитель 21 займет свое походное положение, в котором его и фиксируют приводом 22. Затем с помощью грузоподъемного стрелового механизма 10 очищенный от грунта грунтонос 6 размещают на ложементе 19 и переводят их в транспортное положение. Откинув фиксируемую рамку 23, в устройство 15 для погружения анкеров укладывают анкер 32, один конец которого соединяют с вибромолотом 16, а другой размещают между ребордами поддерживающего ролика 25. После этого перемещают фиксируемую рамку
23 с прижимными роликами 24 в рабочее положение и фиксируют ее.
Выдерживают размер Б, выставляют и фиксируют требуемую для заданного угла погружения а длину телескопической тяги 27.
Переводят устройство 15 для погр жения анкеров в рабочее положение, после чего включают вибромолот 16 и погружают анкер 32 в грунт.
Цилиндрами //и 17 переводят грузоподъемный стреловой механизм 10 и поворотную каретку 9 с устройством 15 для погружения анкеров в плоскость погружения следующего анкера. Выставив соответствующий размер Б и, если необходимо, новую длину телескопической тяги 27, производят погружение следующего анкера. Переводят составляющие элементы установки в транспортное положение и, освободив стенкуупор 4, укладывают направляюпию ферму 2 на базовую мащину.
Установка производительнее и качественнее выполняет технологические операции, сокращает трудозатраты, что в целом позволит получить значительный экономический эффект.
Формула изобретения
1. Установка для монтажа фундаментов,
включающая базовую мащину с направляющей фермой, имеющей загрузочное окно, на которой посредством поворотной каретКи и силовых механизмов смонтировано устройство для погружения анкеров, рабочий орган для образования скважины с приводом, грузоподъемный стреловой механизм, отличающаяся тем, что, с целью повыщения производительности п упроихения
конструкции, направляющая ферма снабжена щарнирьо закрепленным со стороны загрузочного окна ложементом п размещенной в верхней ее части кольцевой направляющей, на которой смонтирован с возможностью поворота силовым цилиндром грузоподъемный стреловой механизм, соединенный тросом с устройством для погружения анкеров, один конец которого снабжен центратором, а другой укреплен на поворотной каретке посредством подвижной телескопической тяги.
2.Установка по п. 1, отличающая с я тем, что центратор выполнен в виде
поддерживающего ролика с ребордами и смонтироваиного в фиксируемой рамке блока прижимных роликов.
3.Установка по п. 1, о т л и ч а ю щ а я с я тем, что ложемент выполнен в виде откидной платформы, имеющей ограничитель с приводом.
4. Установка по п. 1, отличающаяс я тем, что рабочий орган размещен внутри направляющей фермы.
Источник информации, принятый во внимание при экспертизе:
1. Заявка № 2016954/29-33, кл. Е 02 D 5/74, 1974, по которой принято рещение о выдаче авторского свидетельства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для монтажа фундаментов | 1974 |
|
SU554346A1 |
| АГРЕГАТ ДЛЯ УДАЛЕНИЯ ИЗ ГРУНТА АНКЕРОВ И ФУНДАМЕНТОВ ОПОР КОНТАКТНОЙ СЕТИ ЖЕЛЕЗНОЙ ДОРОГИ | 2001 |
|
RU2280734C2 |
| КРАНОМАНИПУЛЯТОРНАЯ УСТАНОВКА | 1999 |
|
RU2167803C2 |
| КРУПНОГАБАРИТНАЯ ПЕРЕВОЗИМАЯ АНТЕННА | 1996 |
|
RU2169969C2 |
| Грузоподъемный кран | 1984 |
|
SU1227591A1 |
| СПОСОБ ЗАБИВАНИЯ И ИЗВЛЕЧЕНИЯ ИЗ ГРУНТА МЕТАЛЛИЧЕСКИХ СТОЛБИКОВ ПРЕИМУЩЕСТВЕННО ПРИ ВОЗВЕДЕНИИ И РЕМОНТЕ БАРЬЕРНЫХ ОГРАЖДЕНИЙ АВТОМОБИЛЬНЫХ ДОРОГ И КОПРОВЫЙ МАНИПУЛЯТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2211895C2 |
| Устройство для загрузки и выгрузкишТучНыХ гРузОВ из КРыТыХ жЕлЕзНОдО-РОжНыХ ВАгОНОВ | 1978 |
|
SU819021A1 |
| Устройство для погружения трубопровода | 1987 |
|
SU1624228A1 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО ГИДРОМАНИПУЛЯТОРА | 1998 |
|
RU2157787C2 |
| Устройство для отбора проб породы | 1982 |
|
SU1067208A1 |