1
Изобретение относится к перегрузочной технике и может быть использовано для загрузки и выгрузки штучных грузов из крытых железнодорожных вагонов.
Известно устройство для загрузки и выгрузки штучных грузов, содержашее самоходный портал с фермой, по которой установлена выдвижная грузовая направляющая, состоящая из шарнирно-соединенных между собой с возможностью поворотных в горизонтальной плоскости секций, несущая грузоподъемный механизм и опирающуюся на пол вагона раму 1.
Известное устройство имеет ограниченную грузоподъемность за счет отсутствия жесткой в радиусной части грузонесущего пути, что снижает производительность устройства.
Целью изобретения является повышение производительности и улучшение условий эксплуатации.
Достигается цель за счет того, что устройство снабжено связанным с проводом механизмом для изгиба грузовой направляющей, состоящим из смонтированных на ферме двух выдвигаемых вдоль фермы балок, соединенных между собой перемычкой, выдвижным вдоль фермы промежуточной направляющей, несущей грузовую направляющую, и смонтированной на перемычке телескопической стрелой, на корпусе которой расположена указанная рама.
Привод механизма может содержать вал, установленный на промежуточной направляющей вал с червячными парами, кинематически связанными через коническую передачу с установленным на телескопической стреле червячном валом, несущим ползун, и смонтированную на перемычке каретку с блоком-эксцентриком.
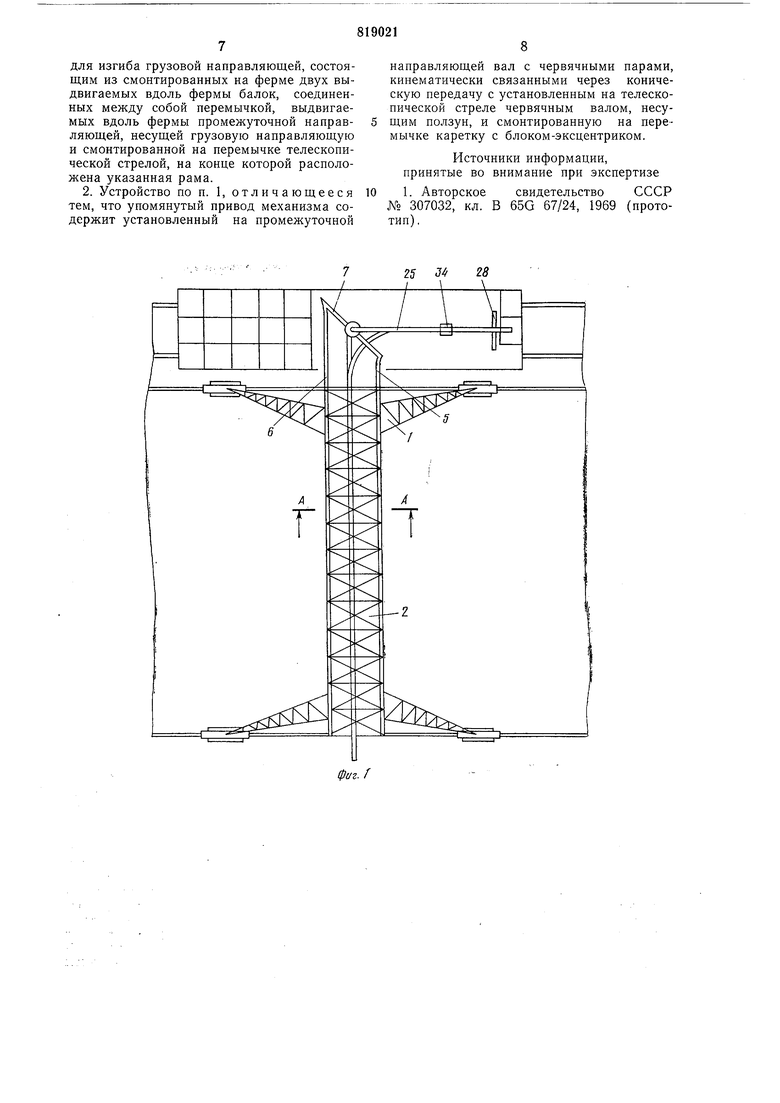
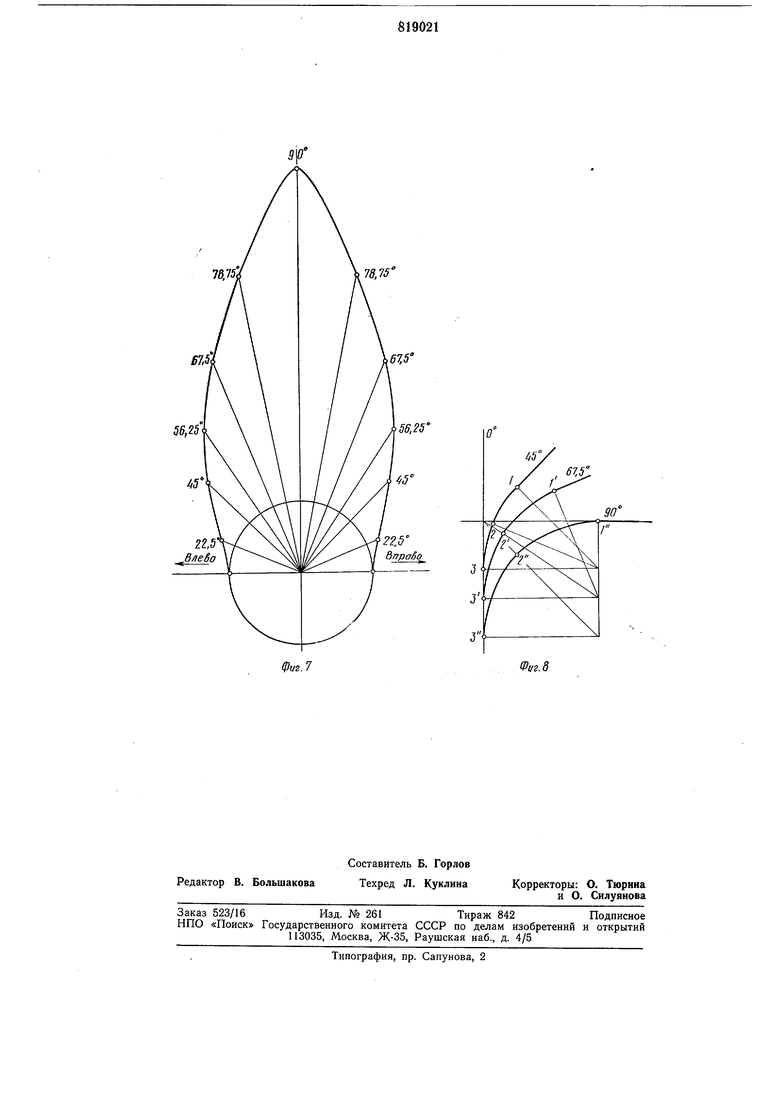
На фиг. 1 изображено устройство, общий вид в плане; на фиг. 2 - то же, вид сбоку; на фиг. 3-разрез А-А фиг 1; на фиг. 4 изображена схема механизма образования грузонесущего пути; на фиг. 5 - разрез Б-Б фиг. 4; на фиг. 6 изображена кинематическая схема образования грузопесущего пути; на фиг. 7 изображен кулачок для каретки; на фиг. 8 изображена схема перемещения точек образования грузонесущего пути для разных углов поворота грузовой направляющей.
Устройство состоит из установленного на железнодорожном пути портале 1 с фермой 2, вдоль нижней ее части установлены две боковые направляющие 3 и центральная направляющая 4.
В боковых направляющих 3 установлены с возможностью продольного перемещения (выдвижения) выдвижные консольные
опорные балки 5 и 6, каждая из которых в поперечном сечении представляет прямоугольник.
Консольные концы балок 5 и 6 несколько разведены в стороны и имеют поворотные гнезда, в которые установлена перемычка 7 с возможностью некоторого перемещения вдоль своей продольной оси. Таким образом, балки 5 и 6 с перемычкой 7 образуют шарнирную полураму, которая может выдвигаться из боковых направляющих 3, причем как одновременно обоими балками 5 и 6 (прямое выдвижение), так и любой одной балкой. В последнем случае угол между перемычкой и балкой будет изменяться от 90 до 45° для одной балки и от 90 до 135° - для другой. При этом расстояние между балками остается постоянным, а их перемещение одной относительно другой обеспечивается за счет того, что концы перемычки 7 перемещаются (скользят) в поворотных гнездах и расстояние между этими гнездами увеличивается.
Выдвижение балки 5 и 6 приводится раздельными электроприводами 8 и 9, установленными на ферме 2.
В центральной направляющей установлена с возможностью продольного перемещения промежуточная направляющая 10, под которой вдоль нее (т. е. вдоль фермы) расположен двухчервячный вал И, зафиксированный от продольного перемещения относительно промежуточной направляющей 10 и может лишь вращаться вокруг своей оси. Во вращение двухчервячный вал 11 приводится с помощью электропривода 12, установленного на промежуточной направляющей 10.
На двухчервячном валу 11 выполнены два червяка 13 и 14. Причем червяк 14 на половину выполнен с правой нарезкой и на половину - с левой. На червяках 13 и 14 имеются ползуны, соответственно 15 и 16.
Конец вала 11, обращенный в сторону перемычки 7, йесет на себе жестко закрепленную коническую щестерню 17.
Перемычка 7 в свой средней части имеет жестко с ней соединенный вертикальный вал 18, идущий от перемычки вверх.
На вертикальном валу 18 на скользящей посадке установлен блок-эксцентрик 19, несущий жестко закрепленную на нем втулку 20, по которой на скользящей посадке установлена промежуточная коническая шестерня 21.
На верхней части втулки 20 жестко за(реплена телескопическая стрела 22, на корневой части которой и параллельно ей установлен червячный вал 23 с конической шестернед 24. Червячный вал 23 несет на себе ползун 25.
Конические шестерни 17 и 24 введены в зацепление с промежуточной конической шестерней 21.
На перемычку 7 установлена каретка 26 с возможностью продольного перемещения вдоль перемычки 7.
Снизу промежуточной направляющей 10 вдоль нее установлена грузовая направляющая 27, состоящая по длине из сплошного двутавра (монорельса) и гибкой части, выполненной из звеньев.
Гибкая часть грузовой направляющей 27 помимо промел уточной направляющей 10 проходит также через ползун 15 каретку 26 и ползун 25. Концевые звенья гибкой части грузовой направляющей 27 и телескопической стрелы 22 соединены между собой и с подвижной опорой 28.
Грузовая направляющая 27 на конце, противоположном подвижной опоре 28, имеет электропривод 29, электромотор и редуктор которого установлены на ферме 2.
На промежуточной направляющей 10 в районе электропривода 12 установлен блок 30, служащий для натяжения и направления троса 31, опоясывающего упомянутый блок 30 и блок-эксцентрик 19, к последнему трос закреплен в точке 32, а к ползуну 16 трос 31 закреплен в точке 33, так что ползун 16 при перемещении по червяку 14 поворачивает блок-эксцентрик 19 (а вместе с ним и телескопическую стрелу) вправо на 90° и влево на 90°.
Нижняя часть блок-эксцентрика 19 выполнена в виде симметричного кулачка, который при повороте на 90° вправо или влево воздействует на ролик каретки 26, перемещает ее по перемычке 7 в точку, лежащую па дуге заданного радиуса.
Одним из главных назначений балок 5 и 6, перемычки 7 вертикального вала 18 втулки 28, корневой части телескопической стрелы 22, червячного вала 23 и ползуна 25 является вынесение точки опоры грузовой направляющей, возможно дальше в вагон.
Червяки 13, 14 и 23 с ползунами 25, 15 и 16, трос 31, блок-эксцентрик 19, трос 32, конические щестерни 17, 21 и 24, телескопическая стрела 22 и каретка 26 все вместе составляют механизм образования в горизонтальной плоскости пути для грузонесущей направляющей 27, на которой установлен электротельфер 34 с грузозахватным устройством 35.
Работает устройство следующим образом. Портал 1 останавливают около вагона, железнодорожный путь которого проложен параллельно железнодорожному пути погрузочно-разгрузочной мащины (или вагон подгоняют к машине) так, чтобы продольная ось грузовой направляющей 27 была посередине длины вагона (напротив двери) перпендикулярно его длинной стороне, как показано.
Одновременно включают оба электропривода 8 и 9, балок 5 и 6, в результате чего вся подвешенная к ферме 2 выдвижная часть (балки 5 и 6, промежуточная направляющая 10 со смонтированным на ней двухчервячным валом и его электроприводом, грузовая направляющая 27) выдвигается из фермы 2 и движется к вагону. Как только подвижная опора 28 коснется пола вагона (у самой двери, если вагон загружен полностью, выдвижение прекращают) электроприводы 8 и 9 выключают. Не производя поворота, выгружают груз из средней части вагона с помощью перемещающегося по грузовой направляющей 27 электротельфера 34 с грузозахватным устройством 35. По мере выгрузки всю выдвижную часть мащины вдвигают дальше в вагон.
После разгрузки средней части вагона грузовую направляющую 27 поворачивают вправо или влево в зависимости от того, какую часть вагона разгружать (правую или левую). Для этого выдвижением соответствующей балки поворачивают перемычку 7 в сторону разгружаемой части вагона. Одновременно с включением электропривода балки включается сблокированный с ним электропривод 12, в результате чего начинает вращаться двухчервячный вал 11, который посредством конических щестерен 17, 21 и 24 передает вращение червячному валу 23. Червяки 23, 13 и 14 вращаясь, приводят в движение ползуны 25, 15 и 16.
Ползун 16 жестко соединенный в точке 33 с тросом 31, приводит последний в движение. Трос 31 поворачивает блок-эксцентрик 19, а последний посредством жестко соединенной с ним втулки 20 поворачивает телескопическую стрелу 22 в сторону разгружаемой части вагона.
Ползуны 25 и 15 перемещаются друг от друга в противоположные стороны.
В отличие от ползунов 25 и 15, которые при повороте телескопической стрелы 22 из исходного (прямого) положения, например вправо, на 90° проходят весь свой путь, а при повороте на 45° - пол пути, каретка 26 при повороте стрелы на 45° проходит лишь примерно одну пятую часть пути, как это установлено методом построений (см. фиг. 2). Поэтому движение каретки 26 по перемычке 7 (от центра в одну или другую сторону) является не равномерным, а переменным. По этой причине каретка 26 приводится в движение посредством эксцентрика, т. е. кулачка, построенного по закону движения каретки. Эксцентрик является нижней частью блока-эксцентрика 22 и выполнен симметричным для обеспечения движения каретки 26 в обе стороны от центра перемычки 7. По достижении необходимого угла поворота электроприводы выключают.
В результате произведенных перемещений (движений) ползун 25, каретка 26, ползун 15 последовательно займут положения точек, лежащих на дуге (криволинейной части), грузонесущего пути для заданного варианта поворота телескопической стрелы 22, максимальный угол поворота которой вправо или влево из исходного (прямого) положения составляет 90°.
Затем включают электропривод 30, с помощью которого выдвигают грузовую направляющую 27 на необходимую длину. Грузовая направляющая 27, выдвигаясь, своим концевым звеном раздвигает телескопическую стрелу 22, перемещает по полу вагона подвижную опору 28. На этом приготовление к выгрузке заканчивается. Для выгрузки груза из вагона электротельфер 34, установленный на грузовой направляющей 27 посредством электропривода, направляют в вагон до подвижной опоры 28. С помощью грузозахватного устройства 35 берут груз, приподнимают и перемещают электротельфер в обратную сторону (из вагона) до места складирования или погрузки в автомашину. После освобождения от груза электротельфер 34 с грузозахватным устройством 35 вновь направляют по грузовой направляющей 27 в вагон за следующим грузом.
В процессе выгрузки одного или нескольких грузов, находящихся в районе подвижной опоры 28, движение совершает только электротельфер с грузозахватным устройством вдоль грузовой направляющей 27. Вся остальная часть машины остается неподвижной. Но по мере выгрузки и освобождения площади (пола) вагона грузовую направляющую 27, а вместе с ней телескопическую стрелу 22 и подвижную опору 28 вдвигают в вагон.
Все виды перемещений, включая перемещение всей мащины вдоль железнодорожного пути, осуществляется с помощью реверсивных электродвигателей, управление которыми выведено на один путь и осуществляется оператором.
Наличие механизма образования оптимального грузонесущего пути обеспечивает автоматическую (без участия человека) установку трех зафиксированных точек на дуге окружности заданного радиуса кривизны.
Формула изобретения
1. Устройство для загрузки и выгрузки щтучных грузов из крытых железнодорожных вагонов, содержащее самоходный портал с фермой, на которой установлена выдвижная грузовая направляющая, состоящая из щарнирно-соединенных между собой с возможностью поворота в горизонтальной плоскости секции, несущая грузоподъемный механизм, и опирающаяся на пол вагона раму, отличающееся тем, что, с целью повыщения производительности и улучшения условий эксплуатации, оно снабжено связанным с приводом механизмом
для изгиба грузовой направляющей, состоящим из смонтированных на ферме двух выдвигаемых вдоль фермы балок, соединенных между собой перемычкой, выдвигаемых вдоль фермы промежуточной направляющей, несущей грузовую направляющую и смонтированной на перемычке телескопической стрелой, на конце которой расположена указанная рама.
2. Устройство по п. 1, отличающееся тем, что упомянутый привод механизма содержит установленный на промежуточной
направляющей вал с червячными парами, кинематически связанными через коническую передачу с установленным на телескопической стреле червячным валом, несущим ползун, и смонтированную на перемычке каретку с блоком-эксцентриком.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР NO 307032, кл. В 65G 67/24, 1969 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Конвейерное устройство для перемещения груза из крытого вагона | 1988 |
|
SU1640081A1 |
| Кран консольный поворотный для спуска и подъема катеров и яхт | 2022 |
|
RU2796276C1 |
| Грузозахватное устройство | 1976 |
|
SU763233A1 |
| Весоповерочный комплекс | 2019 |
|
RU2703194C1 |
| СПРЕДЕР НАКЛОННЫЙ ДЛЯ КОНТЕЙНЕРОВ | 2017 |
|
RU2667206C1 |
| ПОГРУЗЧИК БОРТОВОЙ | 1998 |
|
RU2216462C2 |
| Самоходное грузовое устройство | 1971 |
|
SU676519A1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ ПРЕИМУЩЕСТВЕННО ТРАНСПОРТНО-ПУСКОВЫХ КОНТЕЙНЕРОВ НА ПУСКОВУЮ УСТАНОВКУ КОРАБЛЯ | 2012 |
|
RU2489307C1 |
| УСТРОЙСТВО ДЛЯ ПОГРУЗКИ КИП СПРЕССОВАННОГО ЛЕКАРСТВЕННОГО СЫРЬЯ В КРУПНО-, СРЕДНЕ- И МАЛОТОННАЖНЫЕ КОНТЕЙНЕРЫ | 1999 |
|
RU2150394C1 |
| ПОДКАТНОЙ АВТОМОБИЛЬНЫЙ ПОДЪЕМНИК (ВАРИАНТЫ) | 2023 |
|
RU2804714C1 |


/
ПQ
Tf
ti
i
35
i
A-A
5
Щ:
/2
L
0
//
/ //
J/ J Z7 J/
I 4 2Z 15 J
n ,
/
S
f
-ЛУ
f9
I
26
.5
Фиг.7
67,5°
58,25°
J
Фуг. 8
