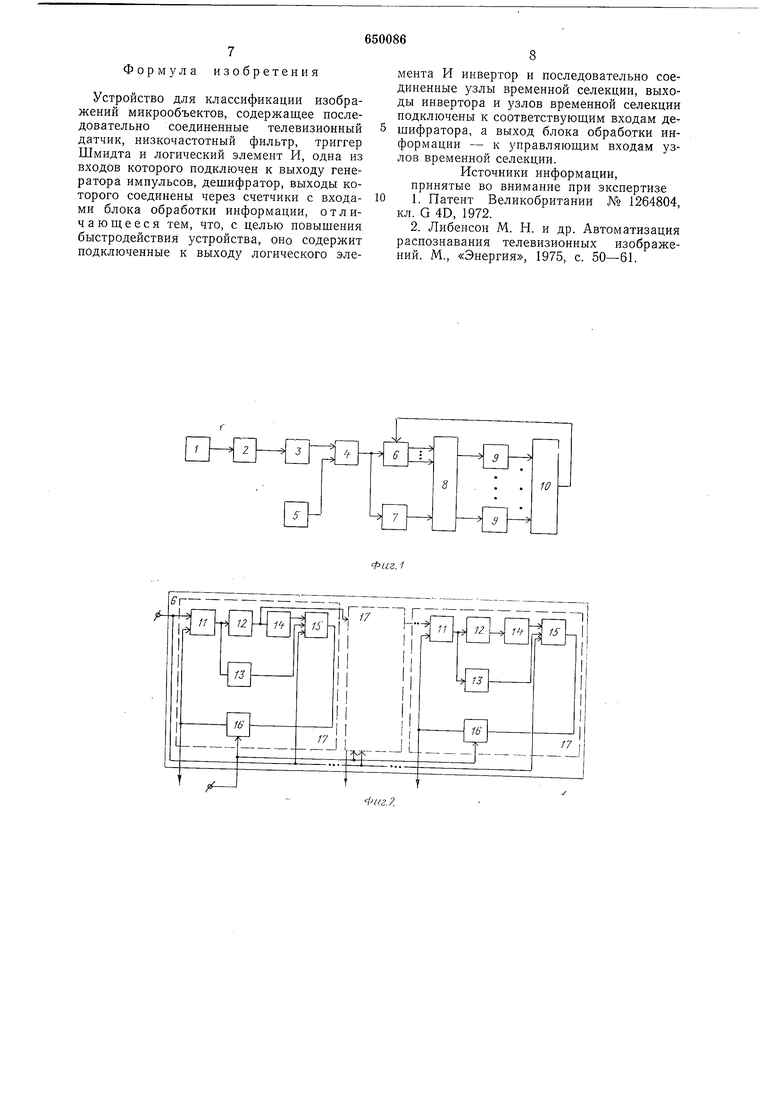
ве тем, что оно содержит подключенные к выходу логического элемента И инвертор и последовательно соединенные узлы временной селекции, выходы инвертора и узлов временной селекции подключены к соответствующим . входам дешифратора, а выход блока обработки информации - к управляюпи1М входам узлов временной селекции. На фиг. 1 ноказана структурная схема предлагаемого устройства; на фиг. 2 - структурная схема блока анализа длин хорд изобрал ения; на фиг. 3 - объект на анализируемом изображении, строки и измерительный растр; на фиг. 4 - хорды АВ, CD и KL объекта, длины которых измеряются блоком анализа длин хорд изображения; на фиг. 5 - диаграмма, поясняющая иринции работы блока анализа длин хорд изображения и дешифратора (сигналы от различных хорд условно показаны импульсами разной амплитуды). Устройство (фиг. 1) для классификации изображений микрообъектов состоит из телевизионного датчика 1, выход которого через низкочастотный фильтр 2 соединен с входом триггера Шмидта 3. Выход последнего соединен с входом логического элемента И 4, другой вход которого подключен к выходу генератора 5 прямоугольных импульсов. Выход логического элемента И 4 соединен непосредственно с входом блока 6 анализа длин хорд изображения и через инвертор 7 - с управляющим входом дешифратора 8. Выходы дешифратора 8 соединены через счетчики 9 с блоком 10 обработки информации. Блок 6 анализа длин хорд изображения содержит сумматоры 11, амплитудные дискриминаторы 12 и 13, инверторы 14, логические элементы И 15 и управляемые элементы 16 задержки, повторяющиеся комбинации которых образуют узлы 17 временной селекции (фиг. 2). Выход блока 10 обработки информации соединен с уиравляющими входами узлов 17 времениой селекции. Устройство работает следующим образом. Видеосигнал, соответствзющий исходному изображению (фиг. 3), с выхода телевизионного датчика 1 подается на вход низкочастотного фильтра 2, который осуществляет сглаживание шумов и мелких образований. Далее видеосигнал поступает на вход триггера Шмидта 3, где происходит разбиение изображений на объекты и фон путем квантования его по яркости на два уровня. Для примера рассмотрим работу устройства при измерении распределения длин хорд, ориентированных под углом 45° к направлению строчной развертки. Направленис анализа задается по командам блока 10обработки информации и определяется выбором параметров блока в анализе длин хорд изображения (точнее выбором длительности задержки) элементов 16 в каждом узле 17 временной селекции. После логического элемента И 4, на один вход которого подается сигнал с триггера Шмидта 3, а на другой поступает сигнал с выхода генератора 5 прямоугольных импульсов, получают сигнал от объекта (фиг. 4) в виде бинарной иоследовательности, соответствующей хордам объекта, ориентированным под рассматриваемым углом. Последовательность импульсов, соответствующая этим хордам, поступает на сумматор 11(фиг. 2) первого узла 17 временной селекции и инвертор 7 (фиг. 1). При сканировании «О строки (фиг. 4) до момента времени t (фиг. 5) в узле 17 временной селекции записан нуль, т. е. на выходах всех разрядов имеется потенциал логического нуля, обозначаемый в дальнейшем через f/o. В момент времени ri (фиг. 5, а) при пересечении линией сканирования начала хорды АВ на вход сумматора 11 (фиг. 2) первого узла 17 временной селекции приходитсигнал логической единицы, обозначенный через U, на второй вход в момент времени поступает сигнал UQ. При этом на выходе сумматора И появится сигнал, равный U. Импульс с амплитудой, равной t/i, одновременно подается на входы амплитудных дискриминаторов 12 и 13 (фиг. 2). Порог амплитудного дискриминатора 13 выбран ,5, а дискриминатора 12 - 5i3 1,5. Следовательно, в рассмотренной ситуации срабатывает дискриминатор 13. Так как есть разрешение по первому входу логического элемента И 15 с инвертора 14, а также по третьему входу с выхода логического элемента И 4 (фиг. 1), то сигнал с выхода дискриминатора 13 через логический элемент И 15 (фиг. 2) поступает на вход элемента 16 задержки. Время задержки тз определяется направлением анализа и вычисляется для всех направлений, кроме горизонтального, по формуле з-стр - , где Тз - время задержки элемента 16 задержки;тстр - длительность строки разложения;Ф-угол между направлением анализа и направлением развертки строк, отсчитываемый по часовой стрелке. Для горизонтального наклона , где Тэ - длительность элемента дикретизации. Для рассматриваемого наклона лиНИИ я/4 при ,1 мсек, тстр 64 мсек и прогрессивной развертке з - стр В В момент времени t( на «1 строке пересечение хорды АВ с линией сканирования приводит к появлению на первом входе сумматора И первого узла 17 временной селекции сигнала f/i. Так как Тз выбрано таким образом, что сигнал с элемента 16 задержки от пересечения хорды АВ на «О строке появится одновременно с сигналом от пересечения хорд АВ на «1 строке, то в момент времени fi (фиг. 5, б) на втором входе сумматора 11 образуется импульс с амплитудой, равной 2Ui (коэффициент передачи сумматора 11 выбран равным единице). При этом срабатывают оба дискриминатора 12 и 13 и сигнал с выхода дискриминатора 12 через инвертор 14 подается на второй вход логического элемента И 15 и запрещает прохождение импульса с выхода дискриминатора 13. Одновременно с выхода дискриминатора 12 сигнал (фиг. 5, в) поступает на вход следующего узла 17 блока 6 анализа длин хорд изображения. В данный момент времени второй узел 17 функционирует аналогично первому в момент времени Таким образом, в отсчет времени t на выходе блока 6 анализа длин хорд изображения формируется параллельный код длины (с точностью до постоянного множителя , . где ш - угол наклона хорды к направлению сканирования хорды АВ), так как длина измеряется в числе пересечений хорды АВ линией сканирования, начиная от первого ее пересечения до пересечения на данной строке. В данном случае в момент пересечения хорды АВ на «1 строке в блоке 6 анализа длин хорд изобралсения будет сформирован код единицы. На «2 строке при пересечении хорды АВ линией сканирования в момент времени ri (фиг. 5, а) первый узел 17 (фиг. 5, б, в) работает так же, как на «О строке, а функционирование второго (фиг. 5, г, д) соответствует его же работе на «1 строке. При этом на выходе блока 6 имеется код числа два, на следующей «3 строке - код трех и т. д. При развертке, например, «5 строки в момент tz пересечение хорды СД запишет в блок 6 очередную единицу, однако она не в состоянии изменить код длины линии АВ, хранящейся в памяти (в элементах 16 задержки каждого узла 17), так как момент измерения каждой хорды строго фиксирован и происходит точно через время Тз. Таким образом, с момента времени и начинается независимое от других накопление кода длины хорды СД. По той же причине в момент времени t происходит измерение кода длины хорды АВ (фиг. 5, б, в), которой теперь будет соответствовать число пять. Таким образом, благодаря наличию элементов 16 задерлчки происходит селективное и динамическое накопление длины каждой хорды. На «6 строке функционирование схемы для хорды СД в отсчет времени 4 точно такое же, как для хорды АВ на «1 строке, т. е. на выходе схемы будет код единицы и т. д. При сканировании «6 строки одновременно прослеживаются и измеряются длины трех хорд (АВ, СД, KL). На «7 строке в момент времени t отсутствует пересечение хорды СД с линией сканирования и поэтому через инвертор 7 (фиг. 1) на управляющий вход дещифратора 8 поступает сигнал разрешения, указывающий на окончание хорды СД. Код длины хорды СД дешифрируется (фиг. 5, и) и единицей записывается в счетчик 9, соответствующий данному отсчету гнстрограммы. В этот же момент времени, поскольку отсутствует пересечение линии сканирования с какой-либо хордой, на третий вход логического элемента И 15 (фиг. 2) каждого узла 17 приходит сигнал f/o, в результате чего происходит разрыв обратной связи в каждом узле 17 до момента пересечения следующей хорды, в данном случае АВ с линией сканирования. Разрыв цепи обратной связи необходим для того, чтобы измерять длину других хорд данного направления, находящихся на продолжении хорды СД. Устройство функционирует аналогичным образом для хорд АВ и KL на «9 и «10 строках (фиг. 5) соответственно в моменты времени ti и Гз Однако на «7 строке хорды АВ и KL имеют пересечение с линией сканирования и поэтому происходит дальнейшее измерение их длины (фиг. 5, а-ж). В данном устройстве с целью экономии числа отсчетов может быть использован неполный дешифратор, т. е. такой, в котором определенной группе кодов на входе соответствует импульс на одном и том же определенном выходе. Таким образом, устройство позволяет одновременно измерять длину каждой хорды и, следовательно, строить распределение длин хорд в заданном направлении за время одного ноля разложения. Полученные данные вводятся в блок обработки, после чего происходит автоматическое переключение направления анализа по сигналу от блока обработки. По окончании анализа изображения во всех направлениях блок обработки реализует одно из рещающих правил. По сравнению с прототипом предлол енное устройство для классификации изобрал ений мпкрообъектов позволяет повысить скорость анализа изображенийФормула изобретения
Устройство для классификации изображений микрообъектов, содержащее после довательно соединенные телевизионный датчик, низкочастотный фильтр, триггер Шмидта и логический элемент И, одна из входов которого нодключен к выходу генератора импульсов, дешифратор, выходы которого соединены через счетчики с входами блока обработки информации, отличающееся тем, что, с целью повышения быстродействия устройства, оно содержит подключенные к выходу логического элемента И инвертор и последовательно соединенные узлы временной селекции, выходы инвертора и узлов временной селекции подключены к соответствующим входам дешифратора, а выход блока обработки информации - к управляющим входам узлов временной селекции.
Источники информации, принятые во внимание при экспертизе
1.Патент Великобритании № 1264804, кл. G 4D, 1972.
2.Либенсон М. Н. и др. Автоматизация распознавания телевизионных изображений. М., «Энергия, 1975, с. 50-61.
Ту
XX
х
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для распознаванияОбРАзОВ | 1977 |
|
SU798906A1 |
| Устройство для селекции и счета объектов,расположенных беспорядочно | 1985 |
|
SU1325539A1 |
| Способ выделения признаков при распознавании изображения | 1981 |
|
SU1048492A1 |
| Способ распознавания объектов | 1977 |
|
SU746611A1 |
| Устройство для считывания и селекции изображений объектов | 1982 |
|
SU1022187A1 |
| Телевизионное устройство для счета объектов | 1980 |
|
SU935989A1 |
| Устройство для селекции изображений объектов | 1989 |
|
SU1777651A3 |
| Устройство для селекции изображений объектов | 1987 |
|
SU1608710A1 |
| Устройство для распознавания формы геометрических фигур | 1976 |
|
SU669362A1 |
| Устройство для считывания изображений микрообъектов | 1983 |
|
SU1160450A1 |

иг..
fUiA
