Поставленная цель достигается тем, что входы логического устройства дополнительно соединены через логические элементы ИЛИ-hii с датчиком скорости, с выходом регулятора скорости и с датчиком тока возоуждения, а выходы соединены со входами регулятора тока якоря и регулятора тока возбуждения.
Кроме того, логическое устройство выполнено В виде диодного дешифратора.
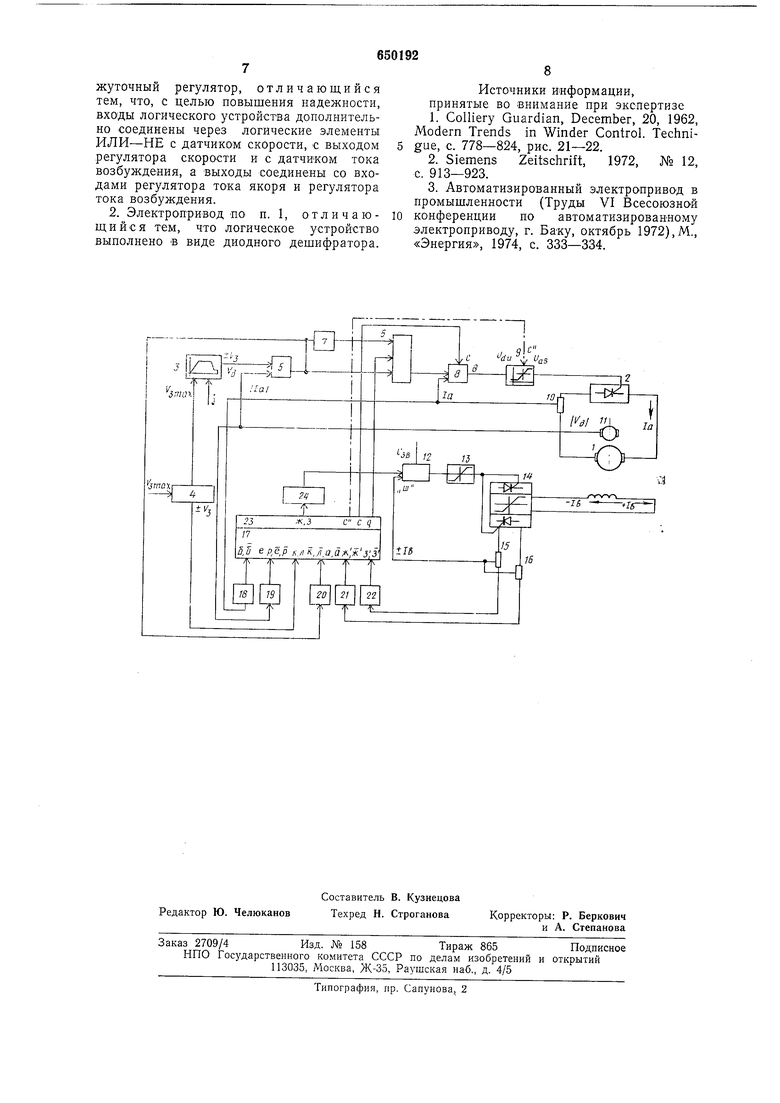
На чертеже представлен электропривод, принциииальная схема.
Электропривод содержит подъемный двигатель постоянного тока независимого возбуждения 1, питающий его нереверсивный тиристорный преобразователь 2, каналы регулирования напрял.ения якорного преобразователя и возбуждения.
К каналу регулирования напряжения якорпого преооразователя относятся формирователь 3 программы движения со входами задания установнвптейся скорости мах, Км1ш и ускорения /, входом подключенный к задатчику 4 сигналов направления движения, а также выходом подключенный ко ВХОДУ пропорционально-интегрального (ИИ) регулятора 5 скорости, который связан со входами коммутатора Ь через промежуточный регулятор / и непосредственно, выход коммутатора Ь через интегральный (И) регулятор 8 тока якоря двигателя связан со входом системы импульсно-фазового управления (СИФУ) У, выход которой управляет тирнсторпым нереверсивным преобразователем 2. ибратные связи осуществляют с помощью датчиков тока якоря iU и скоросги И двигателя. Канал регулирования возбуждения непосредственно включает в себя последовательно соединенные регулятор 12 тока возбуждения с системой импульсно-фазойого управления (СИФУ) 13 и реверсивный преобразователь 14, а также датчики величины и па-правления тока возбуждения 15,1(3. Общим элементом обоих каналов является логическое устройство подачи команд (ЛУПК) Г/, которое собирает параметры, характеризующие состояние привода, и при необходимости выдает дискретные команды па элементы 9 « 2 канала регулирования напряжения якорпого преобразователя, на элементы 13, 14 канала регулирования возбуждения, а также команду для перевода привода из выпрямителя в инвертор п обратно. Логическое устройство 17 выполнеио в виде дещифратора на диодной матрице, горизонтальные шины которой непосредственно связаны с задатчиком 4 направления движения для подачи сигнала ±1/3- (заданное значение скорости) и через логические элементы ИЛИ-НЕ 18, 19, 20, 21, 22 соответствепно с датчиком тока якоря двигателя 10 для измерения тока по л1одулю , датчиком скорости 11 для измерения действительной скорости подъема и спуска по знаку ±Va п по модулю Vf с выходом регулятора 5 скорости, датчиками величины и направления тока возоуждения (1в) и его знака ±1 1Ь, 16. Согласующий элемент ИЛИ-И 1й обеспечивает фиксацию и инверсию логического сигнала тока якорной цепи привода,элементы И 1И-Hh iy, 20 фиксируют полярность сигналов заданной и действительной скорости, обеспечивают их инверсию, а также взаимоблокировку для исключения аварийного появления одновременно сигналов той и другой нолярности, элементы ИЛИ-НЕ 21, i;2 фиксируют заданную величину и полярность тока возбуждения, а также служат для инверсии их логических сигналов.
Вертикальные щины матрицы через согласующий повторитель 23 нодключепы к регулятору 8 тока якоря, к управляющему iBxoAy коммутатора 6, причем одна из вертикальных щин через согласующий повторитель 23 и введенный в канал регулирования возбуждения коммутатор 24 связана со входом регулятора 12 тока возбуждения.
Управлекие приводом для выполнения программы движения машины осуществляется каналом регулирования ЭДС и скорости двигателя при постоянной величине тока возбуждения и потока двигателя. Канал регулирования скорости построен как система подчиненного регулирования (УЬСР) с контурами скорости, производной тока и тока двигателя для выполнения заданной программы движения с требуемой точностью. Капал регулирования тока возбуждения обеспечивает при выполнении программы движения поддержание величины тока возбуждения с требуемой точностью. Управление приводом в процессе изменения знака момента осуществляется одновременно каналами регулирования нанряжения якорного преобразователя и возбуждения и логическим устройством 17. Ири регулировании ЭДС преобразователя 2 в .выпрямительном и ипверторном режимах посредством капала регулирования напряжения якорного преобразователя регуляторами 5-8 и формирователем 3 программы УВ управляется регулятором 12 и устройством 17, которое автоматически выбирает работы преобразователя 2 п преобразователя 14. Фазировка преобразователя 2 при нуле задающего напряжения 8 и заторможенном двигателе принята обеспечивающей расположение управляющих импульсов преобразователя при .
Необходимость «реверсирования перехода из выпрямительного режима в инверторный, п наоборот, возникает либо при измеиении знака статической нагрузки, определяемой уменьшением тока до нуля, либо при принудительном рассогласовании заданной и действительной скорости ±ДУ.
+ V,3±Fa При возникновении на входе логического устройства 17 отрицательного для данного режима работы рассогласования +АУ ДКдоп, неустранимого без изменения знака момента, на выходе логического устройства 17 появляется сигнал, который нодается на один из входов регулятора 8 тока якоря для сдвига управляющего импульса тиристорного преобразователя 2 в максимум ЭДС инвертора fcz и мах и запирания 2. Отсутствие тока якорной цепи 7 0 фиксируется сигналом па входе логического устройства 17. При наличии на входе 17 сигналов ДУ ДУдоп, с выхода логического устройства через коммутирующее устройство 24 на вход 12 и 14 подается сигнал для реверсирования /вНоминальная величина /вы другого знака фиксируется логическими элементами 21, 22, которые обеспечивают на выходе логического устройства 17 изменение управляющего сигнала для снятия сдвига управляющего импульса СИФУ 9 в максимум ЭДС инвертора и возможности регулирования преобразователя 2 в выпрямительном и инверторном режимах.
Сигнал на выходе логического устройства 17 управляет каналом коммутирующего устройства 6 для подключения канала регулятора 8 тока выпрямительного пли -leрез 7 - инверторного режима.
Действием канала регулирования якорного преобразователя устанавливается величина ДК для сдвига управляющего импульса СИФУ 9, преобразователя 2 для регулирования момента нового знака с целью поддержания заданной скорости, либо ее изменения по заданному закону.
Выбор подключения прямого или инверторного выхода регулятора скорости осуществляется по модулю рассогласования заданной и действительной скорости ДК при модуле тока , так как оба сигнала заведены на вход логического устройства.
На входе логического устройства по каналу модуля рассогласования заданной и действительной скорости |Д1/| предусматривается регулирование |ДК|, при котором сигнал передается на логическое устройство 17 с целью установления минимальной величины ДУ((), которая необходима для более точного выполнения заданной диаграммы движения после реверсирования с сохранением устойчивости.
Изменение нулевого значения якорного тока через согласующий элемент 18 |/d| 0 позволяет осуществить изменение зпака момента по этому сигналу, что в случае технологического изменения знака статического момента сокращает время реверсирования и обеспечивает меньщее перерегулирование скорости после заверщения реверсирования.
Введение контроля по модулю тока возбуждения IB при наличии элементов регулнроваьия установки срабатывания элементов на входах элеменюв 2i, 22 позволяет
осуществлять открывание якорного преооразователя для регулирования момента другого знака при малых значениях тока возоуждения. При этом треоуемыи для выполнения заданной диаграммы момент
достигается за счет возрасыьия якорного тока в пределах установленной регулятором скорости 01сечки максимально допустимого значения тока. Гакое управление обеспечивает меньщее отклонение деисгвительной скорости от заданной в процессе реверсирования - изменение знака момента.
Задержка на снятие возбуждения в виде фильтра на входе логических элементовzi,
2 ооеспечивает при сюиорении машины плавный процесс перехода алекАромагнитного момента привода к нулю и залхену его на pedkifiiii iii MoMchT механического тормоза. Ишегра.тьному регулятору б якорного тока Б режиме осганозкп мащины придана функция запоминающего устройства, фиксирующего значение якорного тока с последующей усгавкои нулевого значения, что ооеспечивает задание величины момелia для удержапия 1риводом протягивающего rpyja. iiupoiiUA эгого регулятора и в режим запоминания и программного уменьщения тока до нуля достигается отключением входа регулятора при действии комму та тор а Ь.
jbbiuup коммутатора 24 с устойчивыми состояниями исключает нулевое задание тока возоуждения и возможность возникновения по этой ири-шно ааарииного режима раооты привода.
Формула изобретения
1. Электропривод щахтной подъемной л ашины, содержащий электродвигатель постоянного юка с независимым возиулгдением, якорь которого подключен к лерсверсивпому тиристорному преооразователю, а обмотка возоуждения-к реверсивному тиристорному преооразователю, последовательно включенные регулятор скорости и регулятор тока в канале регулирования напряжения, датчики скорости и тока, подключенные ко входам соответствующих регуляторов, регулятор тока возоужденин в
канале регулирования возоуждения, датчик тока возоуждения и логическое устройство, входы которого иодключены к датчику направления движения, через логические элементы И,лИ-Н к датчику тока
якоря и датчику величины тока возбуждения, а выходы - к управляющему входу коммутатора, включенного между регулятором скорости и регулятором тока и подключенного при этом к выходу регулятора
скорости непосредственно и через промежуточный регулятор, отличающийся тем, что, с целью повышения надежности, входы логического устройства дополнительно Соединены через логические элементы ИЛИ-НЕ с датчиком скорости, с выходом регулятора скорости и с датчиком тока возбуждения, а выходы соединены со входами регулятора тока якоря и регулятора тока возбуждения.
2. Электролривод по п. 1, отличающийся тем, что логическое устройство выполнено в виде диодного дешифратора.
Источники информации, принятые во внимание при экспертизе
1.Colliery Guardian, December, 20, 1962, Modern Trends in Winder Control. Technigue, c. 778-824, рис. 21-22.
2.Siemens Zeitschrift, 1972, № 12, c. 913-923.
3.Автоматизированный электропривод в нромышленности (Труды VI Всесоюзной
конференции по автоматизированному электроприводу, г. Баку, октябрь 1972),М., «Энергия, 1974, с. 333-334.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕВЕРСИВНЫЙ ТИРИСТОРНЫЙ ЭЛЕКТРОПРИВОД | 1992 |
|
RU2079963C1 |
| Электропривод постоянного тока с двухзонным регулированием скорости | 1975 |
|
SU752711A1 |
| Реверсивный электропривод с двухзонным регулированием частоты вращения | 1978 |
|
SU780135A1 |
| Вентильный электродвигатель | 1980 |
|
SU951582A1 |
| Электропривод постоянного тока с двухзонным регулированием частоты вращения | 1982 |
|
SU1096745A1 |
| Реверсивный электропривод постоянного тока | 1987 |
|
SU1534715A1 |
| Устройство для управления реверсивнымВЕНТильНыМ пРЕОбРАзОВАТЕлЕМ | 1977 |
|
SU809465A2 |
| СПОСОБ УПРАВЛЕНИЯ ТИРИСТОРАМИ В РЕВЕРСИВНОМ ТРЕХФАЗНОМ ТИРИСТОРНОМ ЭЛЕКТРОПРИВОДЕ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2498493C2 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ТОРМОЗНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ ЭЛЕКТРОПРИВОДА АГЛОЛЕНТЫ | 2002 |
|
RU2232121C1 |
| Устройство для автоматического регулирования уравнительных токов | 1972 |
|
SU486444A1 |
