Изобретения относятся к оборудованию агломерационных фабрик и предназначены для управления тормозным электродвигателем электропривода аглоленты.
Тормозной электродвигатель аглоленты служит для безударного спуска спекательных тележек с верхней ветви ленты на нижнюю, устранения разрыва между тележками в верхней ветви ленты в зоне разгрузки и предварительного выбора зазора перед пуском во избежание неправильного зацепления спекательных тележек с разгрузочной звездочкой. С началом движения ленты тормозной электродвигатель приводится спекательными тележками в движение и работает в режиме генераторного торможения.
Известен способ управления тормозным электродвигателем, при котором он работает параллельно с тиристорным преобразователем на головной электродвигатель ленты, создавая при этом момент, направленный встречно по отношению к движущему моменту ленты, причем величину тормозного момента устанавливают несколько выше величины момента от веса тележек на разгрузочной звездочке и поддерживают ее постоянной при изменении нагрузки и скорости аглоленты путем сохранения постоянства тока в якоре тормозного электродвигателя при помощи вольтодобавочного устройства, принятый в качестве прототипа [1. М.В.Грейсух и др. Электрооборудование и автоматизация обогатительных и агломерационных фабрик. - М.: Металлургия, 1971, с.147-155].
Однако величина момента от веса тележек не является постоянной и изменяется в определенных пределах в зависимости от расположения спекательных тележек по окружности разгрузочной звездочки. Кроме того, этот момент еще более уменьшается при срезании прилипшего к поверхности тележки слоя агломерата, что при постоянстве тормозного электромагнитного момента создает дополнительную нагрузку на головной электродвигатель. Отсутствие стабилизации токов возбуждения головного и тормозного электродвигателей приводит к нарушению синхронной работы их, особенно при выходе аглоленты из ремонта и постепенного разогрева электрических машин. Кроме того, такой способ управления требует жесткого согласования параметров редуктора и тормозного электродвигателя с параметрами электропривода головной части аглоленты.
Задачей, на решение которой направлено заявляемое изобретения, является уменьшение дополнительной нагрузки головного электродвигателя от избыточного момента тормозного, стабилизация режимов работы электропривода аглоленты.
Для решения поставленной задачи якорную цепь тормозного электродвигателя запитывают от отдельного нереверсивного тиристорного преобразователя, работающего в инверторном режиме, систему регулирования тока якоря настраивают на поддержание постоянства тока электродвигателя при изменении нагрузки и скорости аглоленты, соответствующего максимальному моменту от веса спекательных тележек, а минимальное значение эдс преобразователя ограничивают на уровне, соответствующем разности эдс тормозного электродвигателя при заданной скорости движения аглоленты и падения напряжения от заданного тока в его якорной цепи, при этом токи возбуждения головного и тормозного электродвигателей поддерживают неизменными независимо от изменения температуры их обмоток и питающего напряжения.
Для заданной скорости движения аглоленты Еп=Ет-IR=const, где Eп - эдс тиристорного преобразователя;
Ет - эдс тормозного электродвигателя;
IR - падение напряжения в якорной цепи тормозного электродвигателя.
При снижении момента от веса спекательных тележек появляется избыточный момент тормозного электродвигателя, увеличивается нагрузка головного электродвигателя, снижается скорость движения аглоленты и соответственно эдс тормозного двигателя, а так как Eп=const, снижается так якоря и момент тормозного электродвигателя.
Величина дополнительной нагрузки головного электродвигателя зависит от “жесткости” его механической характеристики, величины тока и сопротивления якорной цепи тормозного электродвигателя, и при снижении значения этих параметров уменьшается. Поэтому тормозной электродвигатель должен работать с полным потоком возбуждения (а не с ослабленным до 0,7 номинального, как указывается в [1]), что становится возможным при использовании отдельного тиристорного преобразователи, при этом соответственно снижается и установленная мощность тормозного электродвигателя.
Поддержание неизменной величины токов возбуждения головного и тормозного электродвигателей позволяет стабилизировать работу электропривода аглоленты при колебаниях температуры окружающей среды и питающего напряжения, а также при запусках аглоленты после ремонта. Перед пуском во избежание неправильного зацепления спекательных тележек с разгрузочной звездочкой тиристорный преобразователь работает в выпрямительном режиме, обеспечивая предварительный выбор зазора.
Пример осуществления способа приведен в п.2.
Известно устройство управления тормозным электродвигателем, якорь которого подключен параллельно якорю головного электродвигателя через выпрямительный мост вольтодобавочного устройства, выполненного на двухкаскадном магнитном усилителе, с жесткой отрицательной обратной связью по току якоря тормозного электродвигателя и с дополнительным регулирующим устройством в цепи его возбуждения, уменьшающим ток возбуждения тормозного электродвигателя при значительном увеличении тока в цепи якоря [1, рис.95, с.149-154].
Однако периодическое изменение момента от веса спекательных тележек на разгрузочной звездочке при постоянстве тормозного электромагнитного момента приводит к дополнительной загрузке головного электродвигателя, а отсутствие ограничения тока якоря тормозного электродвигателя при превышении его эдс величины эдс головного электродвигателя, обусловленное тем, что фактический диапазон изменения скорости привода разгрузочной части при набегании спекательной тележки на зуб звездочки не поддается точному расчету, приводит к значительному увеличению тока в цепи якоря и к необходимости применения дополнительного регулирующего устройства в цепи возбуждения тормозного электродвигателя. Кроме того, отсутствие стабилизации токов возбуждения электродвигателей нарушает их синхронную работу, а подключение якоря тормозного электродвигателя параллельно якорю головного требует жесткого согласования параметров тормозного электродвигателя и редуктора разгрузочной звездочки с параметрами электропривода головной части аглоленты.
Задачей, на решение которой направлено заявляемое изобретение, является уменьшение дополнительной нагрузки головного электродвигателя от избыточного момента тормозного, стабилизация режимов работы электропривода аглоленты.
Для решения поставленной задачи устройство управления тормозным электродвигателем с жесткой отрицательной обратной связью по току якоря состоит из стабилизированного источника тока для питания обмотки возбуждения электродвигателя и отдельного нереверсивного тиристорного преобразователя, собранного по однофазной мостовой выпрямительной схеме, содержащего однофазный магнитный усилитель с самонасыщением и формирователь импульсов, выполненный по схеме одноканального релаксационного генератора на однопереходном транзисторе с RC-цепью и с двумя работающими в противофазе импульсными трансформаторами, первичные обмотки которых через тиристорный коммутатор включены на выход релаксационного генератора, а две вторичные обмотки каждого импульсного трансформатора подключены к управляющим переходам пары одновременно работающих тиристоров преобразователя, и источник питания цепей управления синхронизированным с сетью питания преобразователя выпрямленным напряжением трапецеидальной формы с амплитудой, ограниченной резистором и стабилизированной стабилитроном, включенным через выпрямительный мост. В цепь якоря электродвигателя включена токовая обмотка управления магнитного усилителя, встречно ампервиткам которой от стабилитрона источника питания цепей управления через добавочный резистор включена другая обмотка управления усилителя. На выход магнитного усилителя через развязывающий диод подключены последовательно соединенная с конденсатором RC-цепи эмиттерно-коллекторная цепь эмиттерного повторителя и делитель напряжения, один из резисторов которого включен на вход эмиттерного повторителя, а на часть другого резистора подается напряжение задания скорости движения аглоленты.
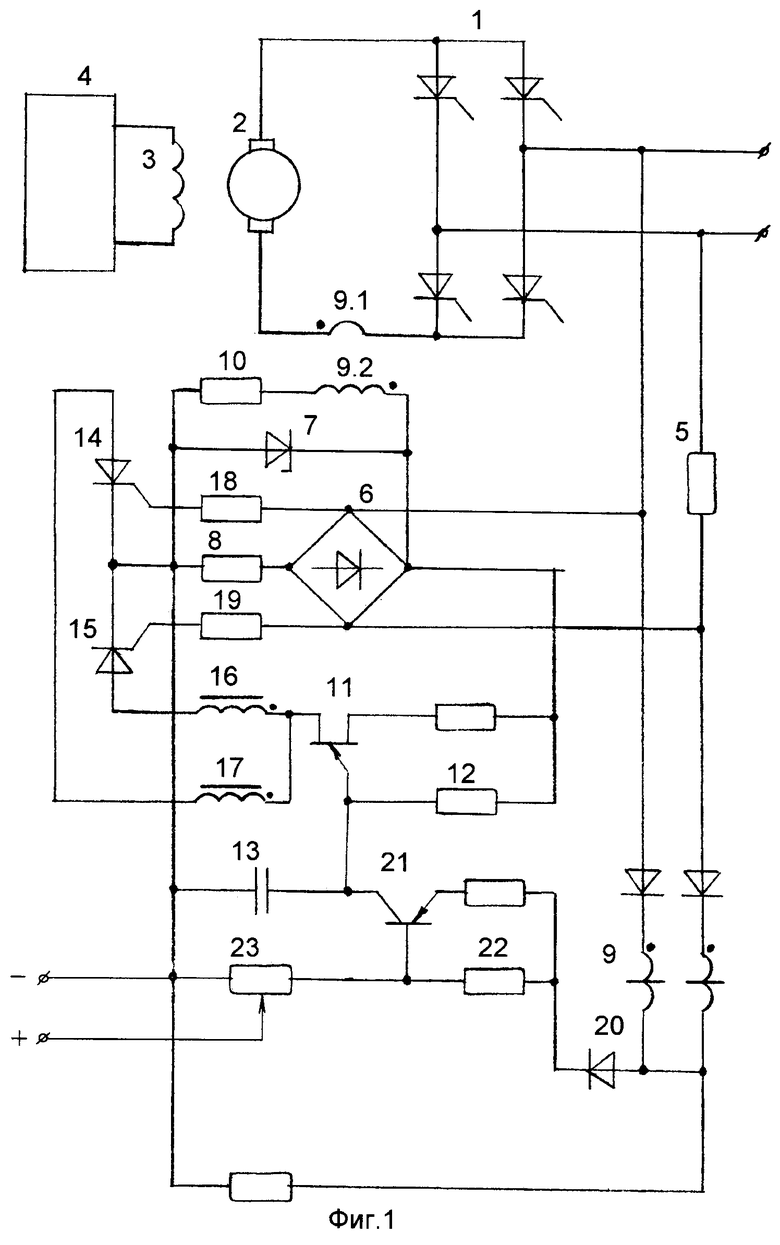
Схема устройства управления тормозным электродвигателем электропривода аглоленты приведена на фиг.1, кривые напряжений на элементах схемы, поясняющие работу устройства, - на фиг.2.
От нереверсивного тиристорного преобразователя 1 получает питание якорь тормозного электродвигателя 2, обмотка возбуждения 3 которого подключена к стабилизированному источнику тока 4. К сети питания тиристорного преобразователя через ограничивающий резистор 5 подключен выпрямительный мост 6 со стабилитроном 7 и другим ограничивающим резистором 8 источника трапецеидального напряжения.
От источника трапецеидального напряжения получают питание рабочие цепи магнитного усилителя 9, одна обмотка управления 9.1 которого включена в цепь якоря 2 тормозного электродвигателя, а другая обмотка управления 9.2, ампервитки которой направлены встречно ампервиткам обмотки 9.1, через добавочный резистор 10 включена параллельно стабилитрону 7. Также параллельно стабилитрону 7 подключены базовая цепь однопереходного транзистора 11 и RC-цепь, состоящая из резистора 12 и конденсатора 13 релаксационного генератора, на выход которого через коммутатор, выполненный на маломощных тиристорах 14 и 15, включены первичные обмотки импульсных трансформаторов 16 и 17 (цепи вторичных обмоток выполнены стандартно и на схеме не показаны). Управляющие электроды тиристоров 14 и 15 через ограничивающие резисторы 18 и 19 включены на вход выпрямительного моста 6. На выход магнитного усилителя 9 через развязывающей диод 20 подключены последовательно соединенная с конденсатором 13 эмиттерно-коллекторная цепь эмиттерного повторителя на транзисторе 21 и делитель напряжения на резисторах 22 и 23, напряжение с резистора 22 которого подается на вход эмиттерного повторителя, а на часть резистора 23 встречно напряжению выхода магнитного усилителя подается напряжение задания скорости движения аглоленты, причем величина сопротивления этой части резистора 23 должна быть на порядок меньше величин сопротивления оставшейся части.
Обмотка управления 9.2 магнитного усилителя задает величину максимального тока якоря тормозного электродвигателя, а токовая обмотка 9.1 осуществляет жесткую отрицательную обратную связь по току, для чего силовой провод цепи питания электродвигателя пропускается через “окно” магнитного усилителя, образуя дополнительную обмотку управления. Резистором 12 RC-цепи релаксационного генератора устанавливается максимальный угол регулирования, определяющий максимальное значение эдс преобразователя 1 в инверторном режиме. Величина напряжения, снимаемая с резистора 22 делителя напряжения при полностью открытом магнитном усилителе 9 и отсутствии задания на скорость аглоленты, устанавливает минимальный угол регулирования, определяющий значение эдс преобразователя 1 в выпрямительном режиме при предварительном выборе зазора перед пуском. При подаче напряжения задания на скорость аглоленты уменьшается напряжение на входе эмиттерного повторителя и соответственно уменьшается ток заряда конденсатора 13 и увеличивается угол регулирования и эдс преобразователя в инверторном режиме.
При достижении равенства напряжений задания и выхода магнитного усилителя устанавливается максимальный угол регулирования, определяемый величиной резистора 12.
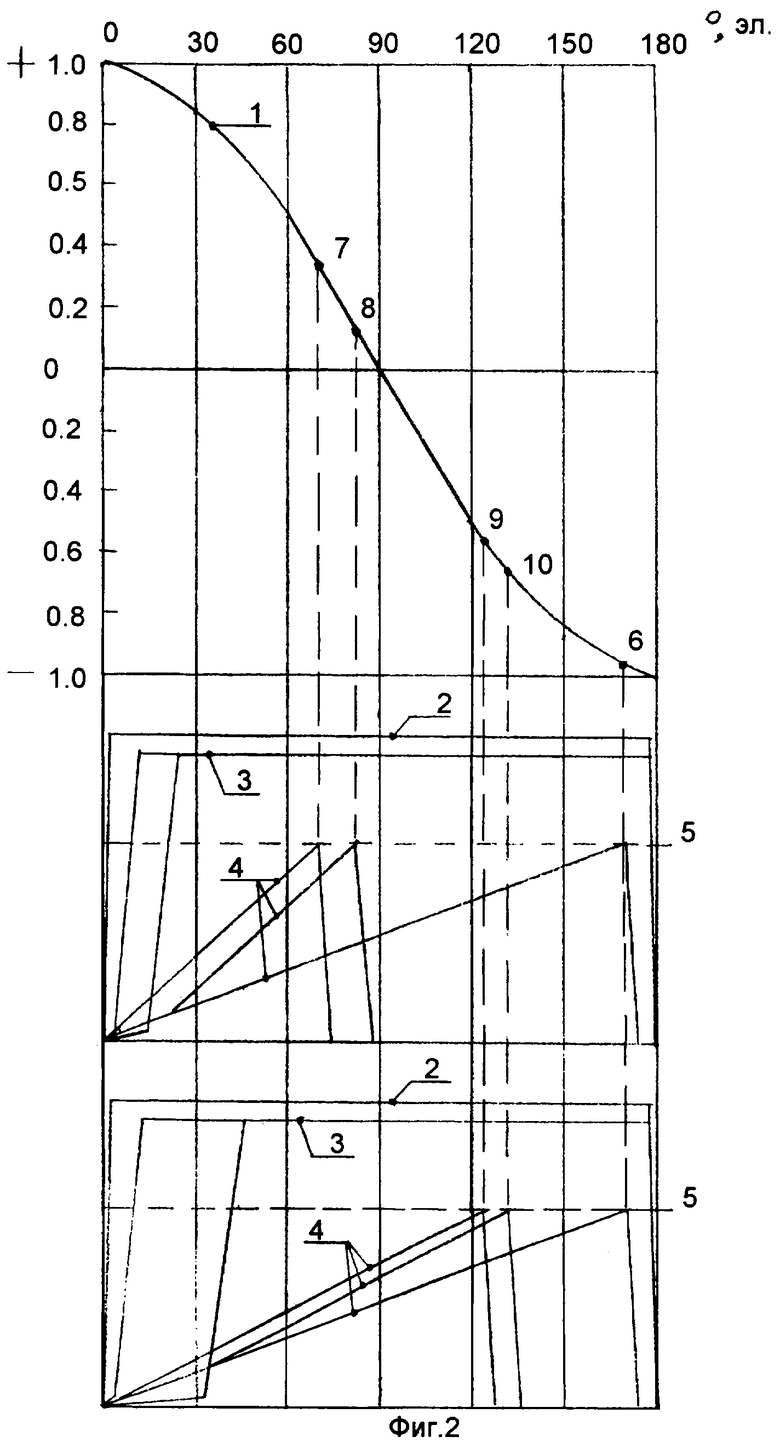
На фиг.2 приведены кривые напряжений на элементах схемы устройства в зависимости от угла регулирования "а" в режиме выбора зазора при отсутствии задания на скорость аглоленты и при произвольно выбранной скорости движения аглоленты. Здесь: кривая 1 - эдс преобразователя при индуктивности якорной цепи, равной бесконечности; кривая 2 - напряжение питания цепей управления; кривая 3 - напряжение выхода магнитного усилителя; кривая 4 - напряжение на конденсаторе 13 RC-цепи релаксационного генератора. Горизонтальные пунктирные линии 5 соответствуют уставке срабатывания однопереходного транзистора генератора.
Точка 6 на кривой 1 соответствует максимальной эдс преобразователя в инверторном режиме с максимальным углом регулирования, заданным резистором 12 RC-цепи, при закрытом магнитном усилителе. Точка 7 - максимальная эдс преобразователя в выпрямительном режиме при выборе зазора с минимальным углом регулирования, заданным делителем напряжения на резисторах 22, 23 при отсутствии задания на скорость аглоленты и разомкнутом по току регуляторе тока, т.е. когда фактический ток якоря электродвигателя меньше заданного и магнитный усилитель полностью открыт. Точка 8 - зазор выбран, электродвигатель стоит с заданным током. Точка 9 - минимальная эдс преобразователя в инверторном режиме на заданной скорости движения аглоленты при разомкнутом по току регуляторе тока и точка 10 - регулятор тока в работе.
При включении преобразователя в работу и отсутствии задания на скорость под действием ампервитков задающей обмотки 9.2 магнитный усилитель полностью открывается, преобразователь начинает работать в выпрямительном режиме, и после окончания выбора зазора тормозной электродвигатель останавливается и стоит под током, заданным обмоткой 9.2. В рабочем режиме эдс преобразователя соответствует заданной скорости. При увеличении тока тормозного электродвигателя выше заданной уставки под действием ампервитков обмотки 9.1 магнитный усилитель прикрывается, увеличивая угол регулирования и соответственно эдс преобразователя и поддерживая ток на заданном уровне. При снижении эдс тормозного электродвигателя, несмотря на то что магнитный усилитель под действием ампервитков задающей обмотки 9.2 полностью открыт, эдс преобразователя не изменяется и ток уменьшается, разгружая головной электродвигатель.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ТИРИСТОРАМИ РЕВЕРСИВНОГО ПРЕОБРАЗОВАТЕЛЯ ДЛЯ ПИТАНИЯ ЯКОРНОЙ ЦЕПИ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА (ВАРИАНТЫ) | 2005 |
|
RU2308142C2 |
| Многодвигательный электропривод | 1990 |
|
SU1818676A1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ТИРИСТОРАМИ РЕВЕРСИВНОГО ПРЕОБРАЗОВАТЕЛЯ ДЛЯ ПИТАНИЯ ОБМОТКИ ВОЗБУЖДЕНИЯ ГЕНЕРАТОРА ПОСТОЯННОГО ТОКА (ВАРИАНТЫ) | 2005 |
|
RU2313893C2 |
| Реверсивный электропривод | 1988 |
|
SU1667213A1 |
| Реверсивный электропривод | 1991 |
|
SU1791951A1 |
| Реверсивный вентильный электропривод | 1981 |
|
SU972642A1 |
| Реверсивный электропривод с двухзонным регулированием частоты вращения | 1978 |
|
SU780135A1 |
| Устройство для управления реверсив-НыМ ВЕНТильНыМ элЕКТРОпРиВОдОМ | 1979 |
|
SU817954A1 |
| Многодвигательный электропривод | 1989 |
|
SU1676061A1 |
| Электропривод | 1985 |
|
SU1307522A1 |
Изобретение относится к оборудованию агломерационных фабрик. Техническим результатом изобретения является уменьшение дополнительной нагрузки головного электродвигателя (ЭД) от избыточного тормозного момента и стабилизация режимов работы электропривода аглоленты. Для этого систему регулирования тока якоря настраивают на поддержание постоянства тока ЭД при изменении нагрузки и скорости аглоленты, соответствующего максимальному моменту от веса спекательных тележек. Для уменьшения дополнительной нагрузки головного ЭД от избыточного тормозного момента и стабилизации режимов работы электропривода аглоленты якорную цепь тормозного ЭД запитывают от отдельного нереверсивного тиристорного преобразователя (ТП), работающего в инверторном режиме. Минимальное значение эдс ТП ограничивают на уровне, соответствующем разности эдс тормозного ЭД при заданной скорости движения аглоленты и падения напряжения от заданного тока в его якорной цепи. Токи возбуждения головного и тормозного ЭД поддерживают неизменными независимо от изменения температуры их обмоток и питающего напряжения. Устройство для осуществления способа содержит систему регулирования с жесткой отрицательной обратной связью по току якоря ЭД, которая состоит из стабилизированного источника тока для питания обмотки возбуждения ЭД и отдельного нереверсивного ТП, собранного по однофазной мостовой выпрямительной схеме. При этом ТП содержит однофазный магнитный усилитель с самонасыщением и формирователь импульсов, выполненный по схеме одноканального релаксационного генератора на однопереходном транзисторе с RC-цепью и с двумя работающими в противофазе импульсными трансформаторами (ИТ). Первичные обмотки ИТ через тиристорный коммутатор включены на выход релаксационного генератора. Две вторичные обмотки каждого ИТ подключены к управляющим переходам пары одновременно работающих тиристоров ТП. Питание цепей управления осуществляется синхронизированным с сетью питания ТП выпрямленным напряжением трапецеидальной формы с амплитудой, ограниченной резистором и стабилизированной стабилитроном, включенными через выпрямительный мост. На выход магнитного усилителя через развязывающий диод подключены последовательно соединенная с конденсатором RC-цепи эмиттерно-коллекторная цепь эмиттерного повторителя и делитель напряжения. Один из резисторов делителя напряжения включен на вход эмиттерного повторителя, а на часть другого резистора подается напряжение задания скорости движения аглоленты. 2 с.п. ф-лы, 2 ил.
| ГРЕЙСУХ М.В | |||
| и др | |||
| Электрооборудование и автоматизация обогатительных и агломерационных фабрик | |||
| - М.: Металлургия, 1971, с.147-155 | |||
| Устройство для управления транспортирующей системой с натяжным барабаном | 1988 |
|
SU1518237A1 |
| Способ автоматического управления процессом двухслойной загрузки шихты на агломерационную машину | 1990 |
|
SU1812232A1 |
| RU 94025230 A1, 27.07.1996 | |||
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ЛЕНТОЧНОГО КОНВЕЙЕРА | 1992 |
|
RU2010760C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СКОРОСТИ ТЯГОВОГО ОРГАНА САМОДЕЙСТВУЮЩЕГО КОНВЕЙЕРА | 1992 |
|
RU2061636C1 |

