1
Изобретение относится к электротехнике, в частности к маломощному синхронному электроприводу на базе гистерезисного двигателя, работающему либо в шаговом режиме, либо в режиме непрерывного вращения.
Известен гистерезисный привод, в котором регулирование скорости осуществляется путем изменения напряжения и частоты 1.
Недостаток его состоит в том, что требуется сложная -схема программного регулирования, особенно при запуске инерционной нагрузки.
Известен инерционный электропривод, содержащий гистерезисный электродвигатель с неподвижными несоосными фазными обмотками, инерционную нагрузку и источник импульсов {2. В нем фазные обмотки двигателя подключены к источнику переменного тока, причем на напряжение питания одной из них дополнительно наложены синхронные двухполярные намагничивающие импульсы.
Данный электропривод требует применения многофазного источника переменного тока, что усложняет реализацию. Кроме того, он не приспособлен для низкоскоростного шагового режима.
Цель изобретения - упрощение электропривода и обеспечение возможности работы в шаговом режиме.
Это достигается тем, что в электроприводе по данному предложению одна из двух несоосных фазных обмоток гистерезиснога электродвигателя подключена к источнику постоянного тока, а другая - к источнику однополярных импульсов.
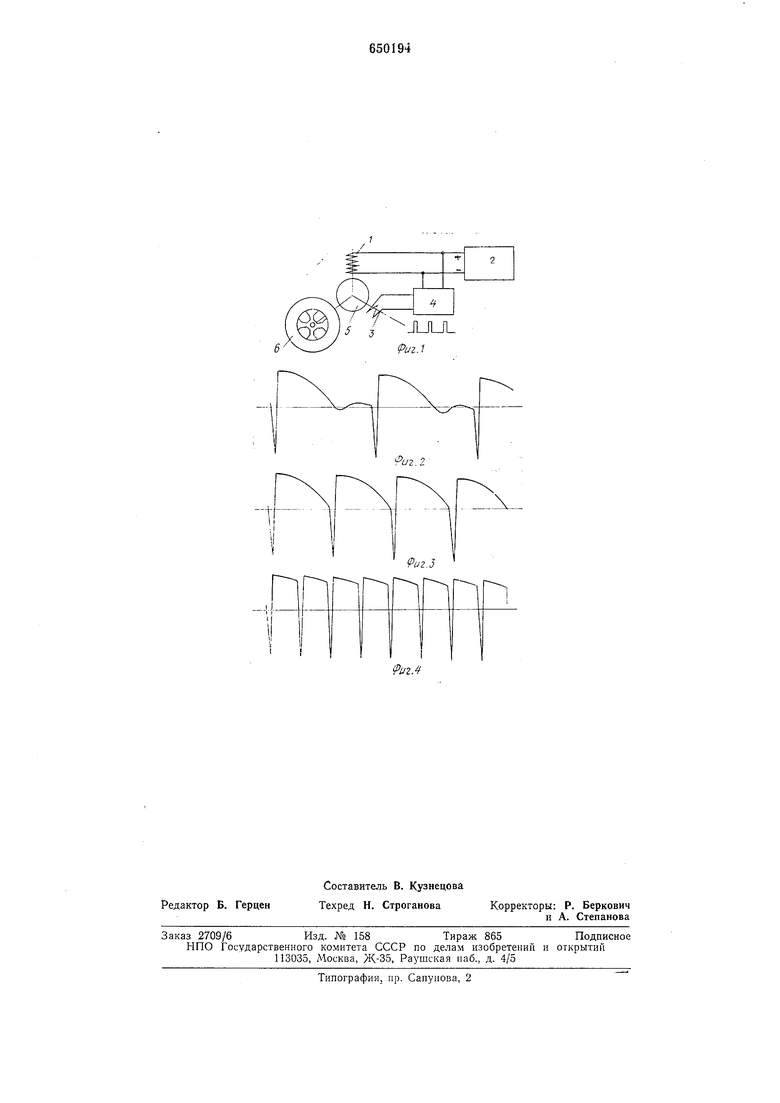
На фиг. 1 представлена структурная схема электропривода; на фиг. 2, 3, 4 - характеристики развиваемого им вращающего момента. Обмотка 1 возбуждения подключена к источнику 2 постоянного тока. Несоосная ей рабочая обмотка 3 соединена с источником 4 однополярных импульсов. Магнитотвердый ротор 5 сочленен с инерционной нагрузкой 6. Обмотка 1 возбуждения, питаемая постоянным током, может быть заменена ее эквивалентом - постоянным магнитом. В этом случае электропривод содержит лишь источник однополярных импульсов и электродвигатель с одной рабочей обмоткой 3.
После подключения обмотки 1 возбуждения к источнику 2 постоянного тока и подачи импульса тока ъ рабочую-обмотку 3 Магнитотвердый ротор 5 намагничивается так, что направление оси его намагниченыости занимает некоторое промежуточное положение между осями намагничивающих сил обмоток. Так как намагничивающая сила обмотки 1 возбуждения существешю меньше намагничивающей силы рабочей обмотки 3, то ось намагниченности ротора располагается ближе к оси рабочей обмотки. По той же причине после завершения действия импульса тока ось памагнпчеппости ротора не совпадает с осью иамагпичивагощей силы обмотки 1 возбуждения и возникает вращающий момент, поворачивающий ротор до совиадення указанных осей. Повторный импульс тока вновь перемагничнвает ротор, ось его намагниченности смещается, п процесс повторяется.
Во BipOMH прохождения импульса тока по рабочей обмотке 3 к ротору приложен противоположный в сравнении с паузой момент, стремящийся повернуть его в противоположпую сторону до совпадения оси намагниченности ротора с осью суммарной намагничивающей сплы двух обмоток. Поскольку импульс кратковремеиен по сравнению с паузой, то момент количества движения во время импульса меньше момента количества движения во время паузы.
На фпг. 2 показано изменение момента во времени, когда иауза между импульсами превышает время поворота ротора до совпадеппя оси его намагниченности с осью обмоткп 1. На фиг. 1 показа-no то же, что п на фиг. 2, но повторный импульс тока приложен в момент совпадения оси намагниченности ротора с осью обмотки 1. На фиг. 4 характер изменения момента соответствует большей частоте следования им.пульсов по сравнению со случаем яа фиг. 3. При этом средний результирующий момент будет иметь место для скважности импульсов, средней по отношению к показанным на фиг. 3 и 4. Для получения максимального момента чаетота импульсов
должна быть уменьшена с увеличением инерционности нагрузки. Чем меньше время импульса, тем больше средний момент. Амплитуду импульса тока следует выбирать из условия намагничивания ротора до максимальной индукции, соответствующей максимальной магнитной проницаелмстп магнитотвердого материала. Реверс двигателя осуществляется изменением либо полярности импульсов, либо полярности напряжения на обмотке возбуждения па угол в 90 электрических градусов.
Предложенный электропривод может
быть использован как в шаговом режиме, так и в режиме асинхронного вращения. Преимущества данного электропривода, помимо простоты средств питания, определяются его основной принципиальной особенностью -рабочий вращающий момент создается здесь в процессе паузы между импульсами. В связи с этим параметры импульса не зависят от момента инерции, п привод может работать при любой сколь
угодно высокой инерционности нагрузки.
Формула изобретения
Инерционный электропривод, содержащий гистерезисный двигатель с неподвижными несоосными обмотками, инерционную нагрузку и источник импульсов, к которому подключена одна из обмоток двигателя, отличающийся тем, что, с целью его упрощения, он снабжен источником
постоянного тока, к которому подключена вторая обмотка двигателя, а источник импульсов выполнен в виде источпика однополярных импульсов.
Источники информации,
принятые во внимание при экспертизе
1.Авторское свидетельство СССР N° 365788, кл. Н 02Р 1/30, 1970.
2.Патент США № 3302084, кл. 318-166, 1967.
s j -JLO.
lptJZ.1
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый электропривод | 1985 |
|
SU1495975A1 |
| Шаговый электропривод | 1985 |
|
SU1354384A1 |
| Шаговый электропривод | 1985 |
|
SU1354383A1 |
| ИМПУЛЬСНЫЙ ГИСТЕРЕЗИСНЫЙ МИКРОЭЛЕКТРОДВИГАТЕЛЬ | 1990 |
|
RU2027286C1 |
| Шаговый инерционный электропривод | 1981 |
|
SU1007173A1 |
| Шаговый электропривод | 1985 |
|
SU1354382A1 |
| Шаговый электропривод | 1985 |
|
SU1365340A1 |
| Инерционный электропривод | 1980 |
|
SU961086A2 |
| Гистерезисный электропривод ротора гироскопа | 1972 |
|
SU534015A1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С ЯВНОПОЛЮСНЫМ ЯКОРЕМ | 2010 |
|
RU2416860C1 |