машинами при
Изобретение относится к электротехнике, к управлению электрическими
, и может быть использовано создании простых шаговых электроприводов с гистерезисными двигателями ,
Цель изобретения расширение . функциональных возможностей путем дискретного регулирования длины шага На фиг. 1 показана схема электропривода; на фиг, 2 - двигатель, продольный разрез;.на фиг. 3 - расположение проекций осей обмоток на плос- перпендикулярную оси двигате- на фиг. 4 - циклограмма работы
кость.
ля;
привода; на фиг. 5 - 7 - схемы
электропривода, варианты выполнения
Электропривод (фиг, 1) содержит источник 1 постоянного Е1апряжения 1ИЛИ токаэ источник 2 импульсов, элемент 3 запрета с выходньп-ш выводами 4 и 5, элемент 6 задержки, а также электродвигатель с первой обмоткой 7, имеющей ось 8, второй обмоткой 9, имеющей ось 10, и гистерезисным ротором 11„ Несоосные обмотки 7 и 9 находятся на статоре. Ротор 11 может быть гладким.
Выход источника 1 постоянного напряжения или тока соединен -с первым входом элемента 3 запрета, а выход его соединен с обмоткой 7,
В электропривод введены регистр 12 первый ключ 13, которьй имеет выходные выводы 14 и 15, вторые ключи 16™ 18, которые имеют выходные выводы 19- 24, одновибратор-формирователь 25 импульсов э а также элемент 26 сужения. импульсов.
На статоре электродвигателя распо- л:ожены та1сже первая дополнительная обмотка 27, имеющая ось 28, и вторая дополнительная обмотка 2.9, имеющая ось 30. Обмотки 7,.9, 27 и 29 несо- осны. Если ось 8 обмотки 7 имеет проекцию на плоскость, перпендикулярную оси вращения электродвигателя, в виде оси 31, то оси 10, 28 и 30 имеют проекции на ту же плоскость (фиг,3) в виде соответственно осей 32-34, Как видно на фиг„3, углы А, - А между указанными проекциями осей обмоток не равны друг другуs Калодая из обмоток 7, 9,, 27 и 29 электрического двигателя (фиг.2) имеет незгниполярнута магнитную систему.
Вторая обмотка 9 и дополнительные обмотки 27 и 29 (фиг. 2) расположены
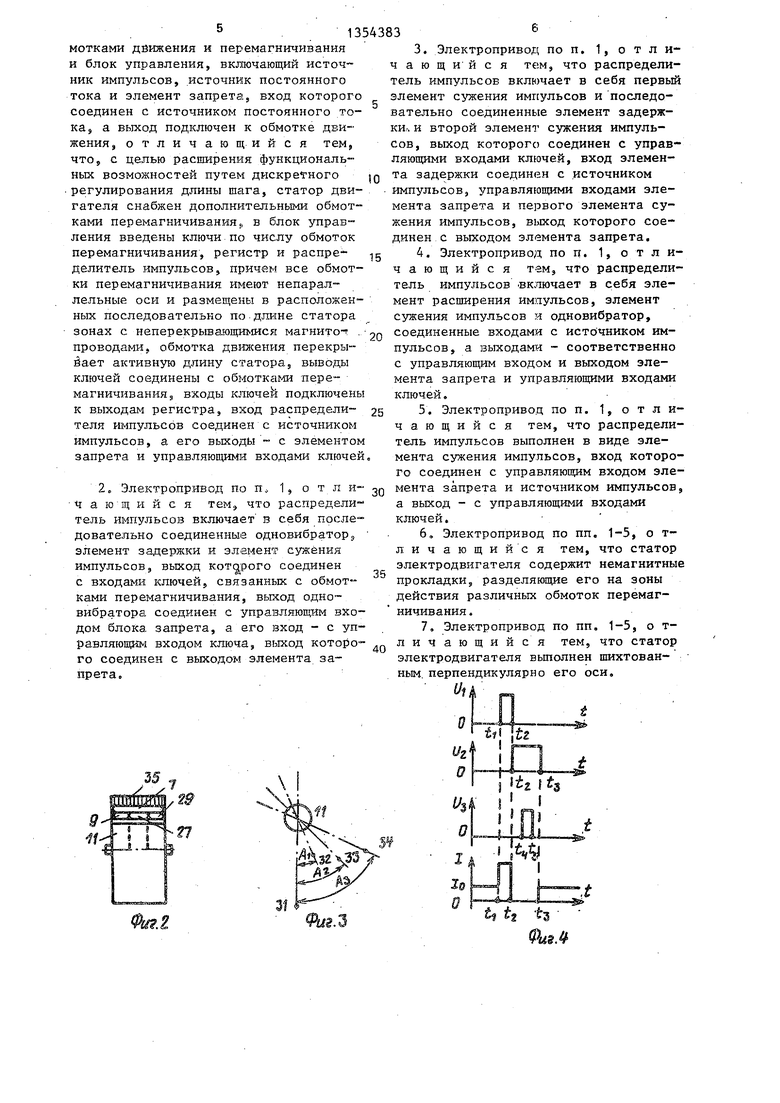
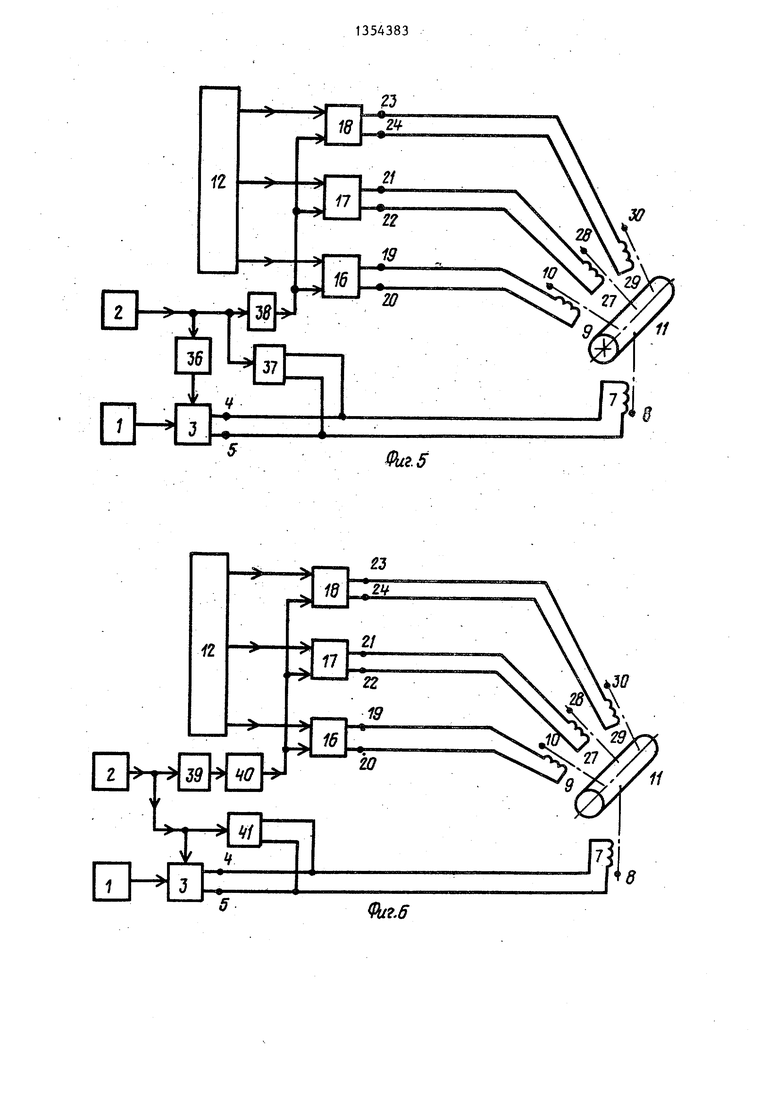
по длине статора 35 последовательно, одна за другой и с неперекрытием зон магнитных полей обмоток 9, 27 и 29 друг с другом. Первая обмотка 7 расположена по всей длине статора 35 с перекрытием зон магнитных полей остальных обмоток 9, 27 и 29. Элементы 6, 13, 25 и 26 в совокупности образуют распределитель импульсов,
которьй может быть выполнен и по другим схемам. Он может содержать также элемент 36 расщирения импульсов, соединенный входом с входами элемента 37
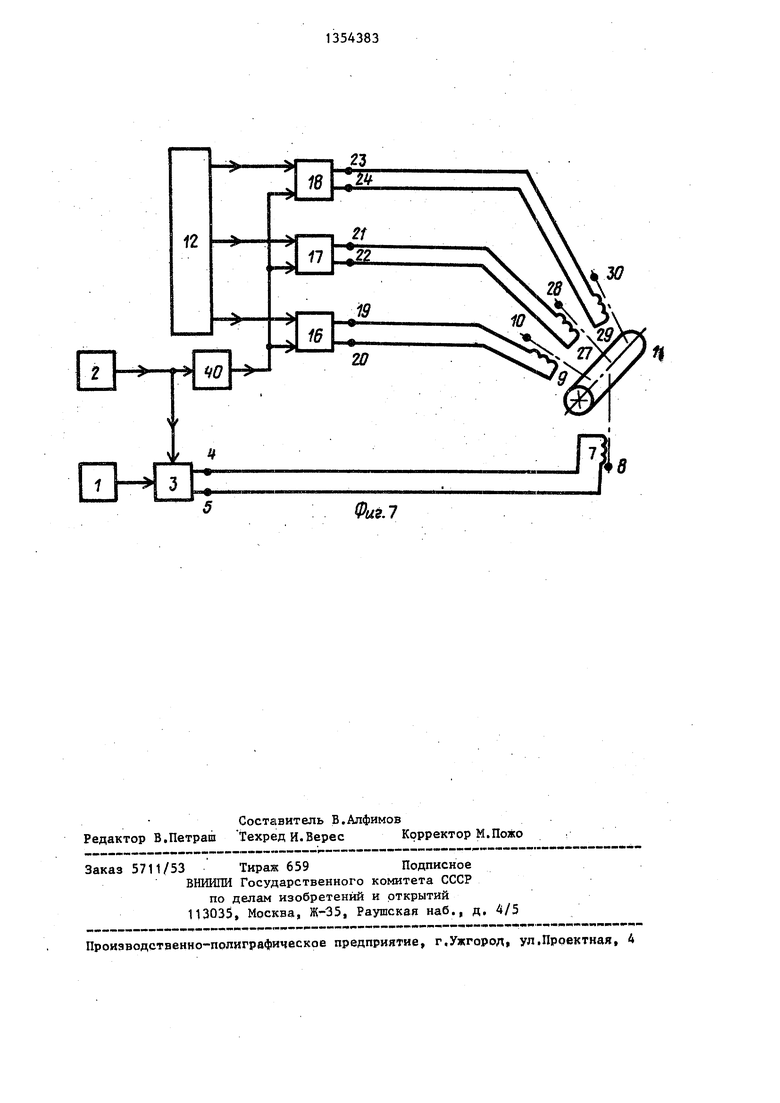
5 сужения импульсов, и формирователь 38 импульсов (фиг„ 5) или элемент 39 задержки, соединенный: выходом с входом элемента 40 сужения импульсов, а входом - с входом элемента 41 сужеQ ния импульсов (фиг. 6) или состоять из едного только элемента 40 сужения импульсов,
В схеме привода выход источника 2 импульсов соединен с входом формиро5 вателя 25 импульсов, выход источника 2 импульсов соединен с входом первого ключа 13, выход которого соединен с первой обмоткой 7 электродвигателя,- выход формирователя 25 импульсов соединен с входом элемента 6 задержки и с запрещающим входом элемента 3 запрета. Выход элемента 6 задержки соединен с входом элемента 26 сужения импульсов, выход которого соединен с управляющими входами вторых ключей 16 - 18, Разрядные выходы регистра 12 соединены с входами соответствующих ключей 16-18, выход ключа 16 соединен с второй обмоткой 9 электродвигателя, а выходы ключей 17 и 18 соединены с соответствующими дополнительными обмотками 27 и 29,
Дпя большей независимости магнит- 5 ных полей обмоток 9, 27 и 29 друг от друга (фиг, 2) статор 35 двигателя можно выполнять шихтованным с основными плоскостями, магнитопроводящих пластин, перпендикулярными оси враще- 0 ния электродвигателя. Между магнито- проводящими пластинами статора 35 могут быть помещены немагнитные прокладки. Шихтовку можно в ряде случаев заменить выполнением статора 35 из 5 материала с магнитной неравномерностью, где магнитная проводимость статора 35 по продольной оси (фиг,2) делается минимальной, а магнитные проводимости в плоскостях, перпенди0
S
0
кулярных оси вращения электродвигателя, делаются максимальными.
Регистр 12 в каждом разряде может иметь сигнал единицы в виде высокого уровня направления хгибо нуля в виде низкого уровня напряжения. Возможно выполнение регистра для троичного кода, в этом случае каждый разряд регистра может иметь сигнал трех значе- .ий (положительная единица - это положительный уровень напряжения, нуль - это нулевой уровень напряжения, а отрицательная единица - это отрицательный уровень напряжения).
Ключ 13 питается от отдельного источника питания. Если же ключ 13 питать напряжением или током от источника 1, то в составе элемента 3 запрета нужно предусмотреть аттенюатор напряженияi В исходном положении элемент 3 запрета открыт и сигнал постоянного тока проходит от источника 1 через элемент 3 на обмотку 7. Этим обеспечивается фиксахщя ротора 11. Намагничивающая сила от тока обмотки 7 небольшая, недостаточная для пол-о кольку магнитные системы обмоток 9, ного перемагничивания ротора 11. 27, 29 независимы друг от друга, а
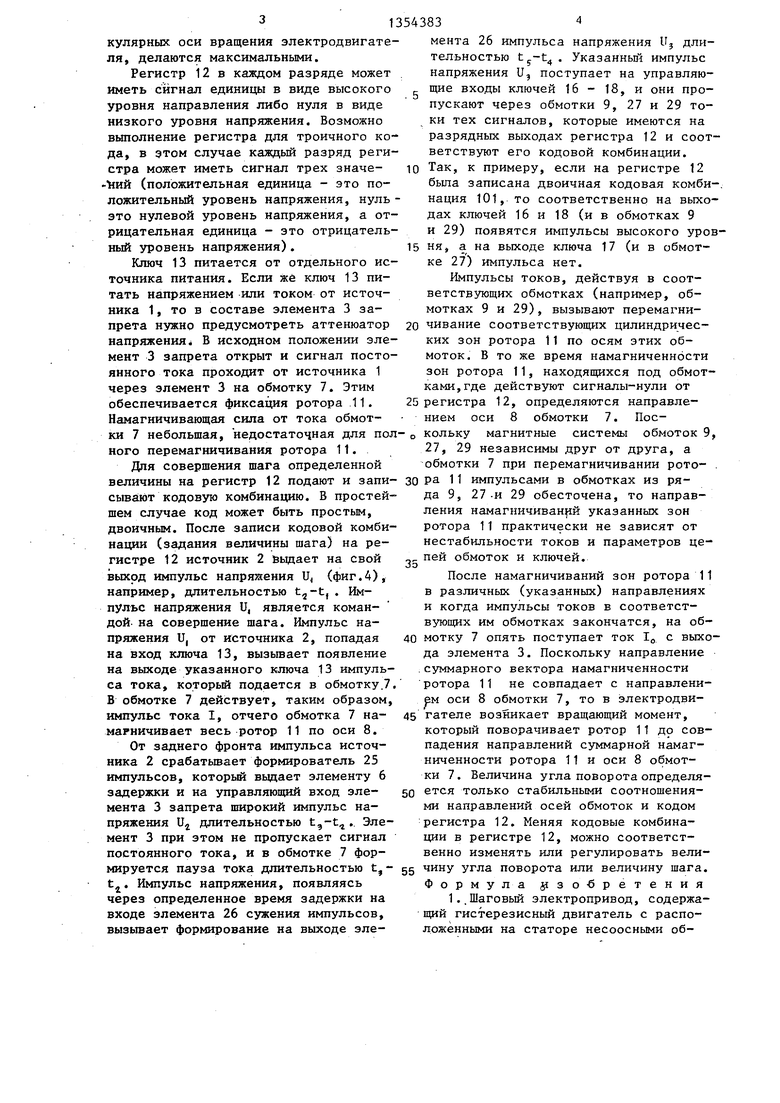
Для совершения шага определенной обмотки 7 при перемагничивании рото- . величины на регистр 12 подают и запи- ЗО Р 11 импульсами в обмотках из ря- сывают кодовую комбинацию. В простей- да 9, 27-и 29 обесточена, то направ- шем случае код может быть простым, двоичным. После записи кодовой комбинации (задания величины шага) на регистре 12 источник 2 ььщает на свой выход импульс напряжения U, (фиг.4), например, длительностью ,. Импульс напряжения U, является командой на совершение шага. Импульс напряжения и, от источника 2, попадая на вход ключа 13, вызьшает появление на выходе указанного ключа 13 импульления намагничиваний указанных зон ротора 11 практически не зависят от нестабильности токов и параметров це„ пей обмоток и ключей. Зо
После намагничиваний зон ротора 11 в различных (указанных) направлениях и когда импульсы токов в соответствующих им обмотках закончатся, на об- 40 мотку 7 опять поступает ток IQ с выхода элемента 3. Поскольку направление ,суммарного вектора намагниченности ротора 11 не совпадает с направлением оси 8 обмотки 7, то в электродвиса тока, который подается в обмотку.7. В обмотке 7 действует, таким образом, импульс тока I, отчего обмотка 7 на- марничивает весь ротор 11 по оси 8.
От заднего фронта импульса источника 2 срабатывает формирователь 25 импульсов, который выдает элементу 6 задержки и на управляющий вход элемента 3 запрета широкий импульс напряжения Uj длительностью t,-t. Элемент 3 при этом не пропускает сигнал постоянного тока, и в обмотке 7 формируется пауза тока длительностью t,- 55 чину угла поворота или величину шага.
1.J,. Импульс напряжения, появляясь через определенное время задержки на входе элемента 26 сужения импульсов, вызьгаает формирование на выходе элеФормула З1зо-бретения
1..Шаговый электропривод, содержащий гистерезисный двигатель с расположенными на статоре несоосными об543834
мента 26 импульса напряжения U, длительностью t -t . Указанньп импульс напряжения U, поступает на управляю- щие входы ключей 16 - 18, и они пропускают через обмотки 9, 27 и 29 токи тех сигналов, которые имеются на разрядных выходах регистра 12 и соответствуют его кодовой комбинации.
10 Так, к примеру, если на регистре 12 бьша записана двоичная кодовая комбинация 101, то соответственно на выходах ключей 16 и 18 (и в обмотках 9 и 29) появятся импульсы высокого уров15 ня, а на выходе ключа 17 (и в обмотке 27) импульса нет.
Импульсы токов, действуя в соответствующих обмотках (например, обмотках 9 и 29), вызывают перемагни20 чивание соответствующих цилиндрических зон ротора 11 по осям этих обмоток. В то же время намагниченности зон ротора 11, находящихся под обмотками, где действуют сигналы-нули от
25 регистра 12, определяются направлением оси 8 обмотки 7. Пос обмотки 7 при перемагничивании рото- . ЗО Р 11 импульсами в обмотках из ря- да 9, 27-и 29 обесточена, то направ-
ления намагничиваний указанных зон ротора 11 практически не зависят от нестабильности токов и параметров це„ пей обмоток и ключей. Зо
После намагничиваний зон ротора 11 в различных (указанных) направлениях и когда импульсы токов в соответствующих им обмотках закончатся, на об- 40 мотку 7 опять поступает ток IQ с выхо обмотки 7 при перемагничивании рото- ЗО Р 11 импульсами в обмотках из ря- да 9, 27-и 29 обесточена, то направ-
да элемента 3. Поскольку направление ,суммарного вектора намагниченности ротора 11 не совпадает с направлением оси 8 обмотки 7, то в электродви45 гателе возникает вращающий момент, который поворачивает ротор 11 до совпадения направлений суммарной намагниченности ротора 11 и оси 8 обмотки 7. Величина угла поворота определя50 ется только стабильными соотношениями направлений осей обмоток и кодом -регистра 12. Меняя кодовые комбинации в регистре 12, можно соответственно изменять или регулировать велиФормула З1зо-бретения
1..Шаговый электропривод, содержащий гистерезисный двигатель с расположенными на статоре несоосными
мотками движения и перемагничивания и блок управления, вклпочающий источник импульсов, источник постоянного тока и элемент запрета, вход которого соединен с источником постоянного тока, а выход подключен к обмотке движения, отличающийся тем, что, с целью расширения функциональных возможностей путем дискретного регулирования длины шага, статор дви- гателя снабжен дополнительными обмотками перемагничивания5, в блок управления введены ключи по числу обмоток перемагничивания, регистр и распре- делитель импульсов, причем все обмотки перемагничивания имеют непараллельные оси и размещены в расположенных последовательно по.длине статора зонах с неперекрывающимися магнитог проводами, обмотка двиясения перекры йает активнзпо длину статора, выводы ключей соединены с обмотками пере
магничиванияд входы ключей подключены к выходам регистра, вход распределителя импульсов соединен с источником импульсов, а его выходы с элементом запрета и управляющими входами ключей
2, Электропривод по и 1, о т л и- Чающийся тем, что распределитель импульсов включает в себя последовательно соединенные одновибратор элемент задержки и элемент сужения импульсов, выход которого соединен с входами ключей, связанных с обмотками перемагничивания, выход одно- вибратора соединен с управляющим входом блока запрета, а его вход - с управляющим входом ключа, выход которо- го соединен с выходом элемента запрета.
6
3. Электропривод по п. 1, отличающийся тем, что распределитель импульсов включает в себя первый элемент сужения импульсов и последовательно соединенные элемент задержки/, и второй элемент сужения импульQg
0
5
0
.„ л и
ляющими входами ключей, вход элемента задержки соединен с источником импульсов, управляющими входами элемента запрета и первого элемента сужения импульсов, выход которого соединен с выходом элемента запрета.
4,Электропривод по п. 1, отличающийся тем, что распределитель импульсов .включает в себя элемент расширения импульсов, элемент сужения импульсов и одновибратор, соединенные входами с источником импульсов, а выходами - соответственно с управляющим входом и выходом элемента запрета и управляющими входами ключей.
5,Электропривод по п. 1, отличающийся тем, что распределитель импульсов выполнен в виде элемента сужения импульсов, вход которого соединен с управляющим входом элемента запрета и источником импульсов, а выход - с управляющими входами ключей.
6,Электропривод по пп. 1-5, о т
л и
личающиися тем, что статор электродвигателя содержит немагнитные прокладки, разделяющие его на зоны действия различных обмоток перемагничивания .
7, Электропривод по пп, 1-5, о т- чающийся тем, что статор электродвигателя вьшолнен шихтованным перпендикулярно его оси,
(Jl
18
12
/7
16
2 h-
I
35
I
43i
IHI
37
J
25 „
2Af
12 19
X
20
Фиг 5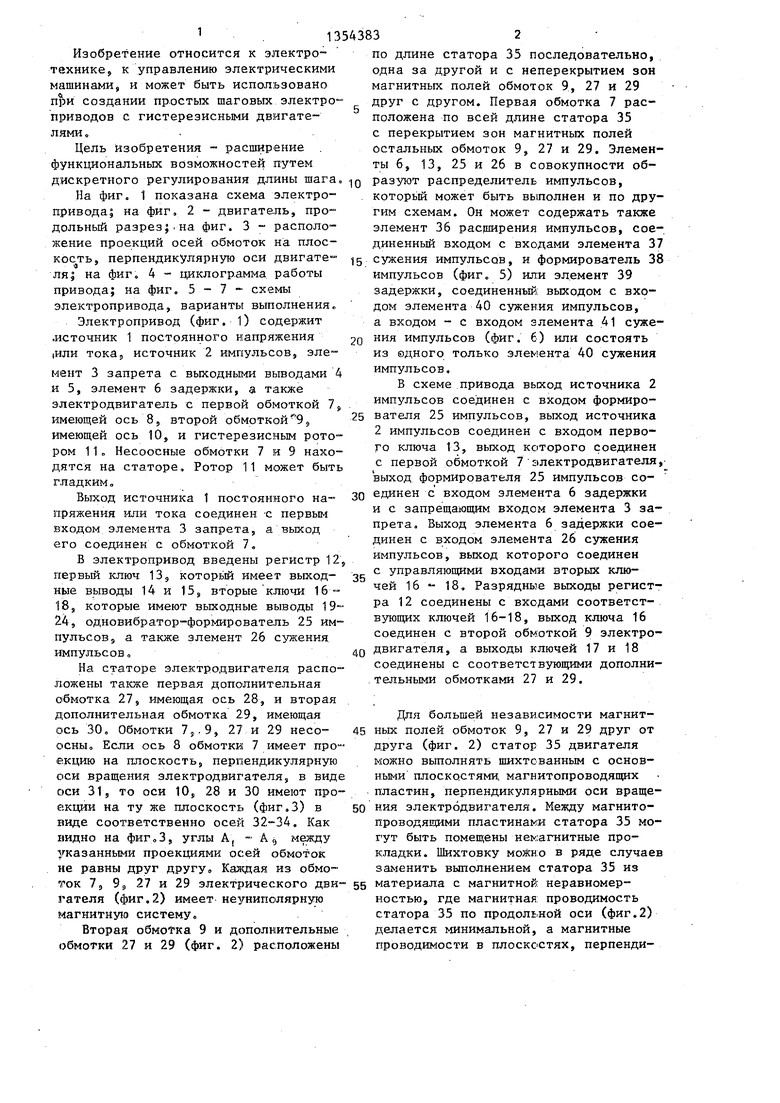
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый электропривод | 1985 |
|
SU1365340A1 |
| Шаговый электропривод | 1985 |
|
SU1354384A1 |
| Шаговый электропривод | 1985 |
|
SU1495975A1 |
| Способ управления шаговым двигателем с гистерезисным ротором | 1986 |
|
SU1394389A1 |
| Шаговый электропривод | 1985 |
|
SU1354382A1 |
| Инерционный электропривод | 1980 |
|
SU961086A2 |
| Шаговый инерционный электропривод | 1981 |
|
SU1007173A1 |
| Система электропитания и управления группами гистерезисных электродвигателей | 1984 |
|
SU1241339A1 |
| Устройство для определения характеристик гистерезисного электропривода | 1984 |
|
SU1251276A1 |
| Способ синхронизации группы гистерезисных двигателей | 1984 |
|
SU1241390A1 |
Изобретение относится к электротехнике, к управлению электрическими машинами. Цель состоит в расширении функциональных возможностей путем дискретного регулирования длины шага. Устройство содержит электродвигатель, гистерезисный ротор 11, статор, на котором размещены основные 7 и 9 и дополнительные обмотки 27 и 29, несоосные друг другу. Фиксация ротора 11 обеспечивается постоянным током,, который схема управления подает на обмотку 7 от источника 1. Для совершения шага на регистр 12 записывают кодовую комбинацию. После этого схема управления подает от источника 2 импульс на обмотку 7, намагничивающую ротор 11 вдоль ее оси, а затем одновременно с подачей импульсов на обмотки 9, 27, 29, намагничивающие ротор 11 вдоль их осей, подается через элемент задержки 6 пауза на обмотку 7. Поскольку направление суммарного вектора намагниченности ротора 11 не совпадает с направлением оси обмотки 7, то возникает вращающий момент, перемещающий ротор на один шаг, величина которого определяется соотношением направлений осей обмоток и кодом регистра 12. 6 з.п. ф-лы, 7 ил. 23 (Л 2 21 22 i9 со ел 00 оо со 2Q 6 fe./ 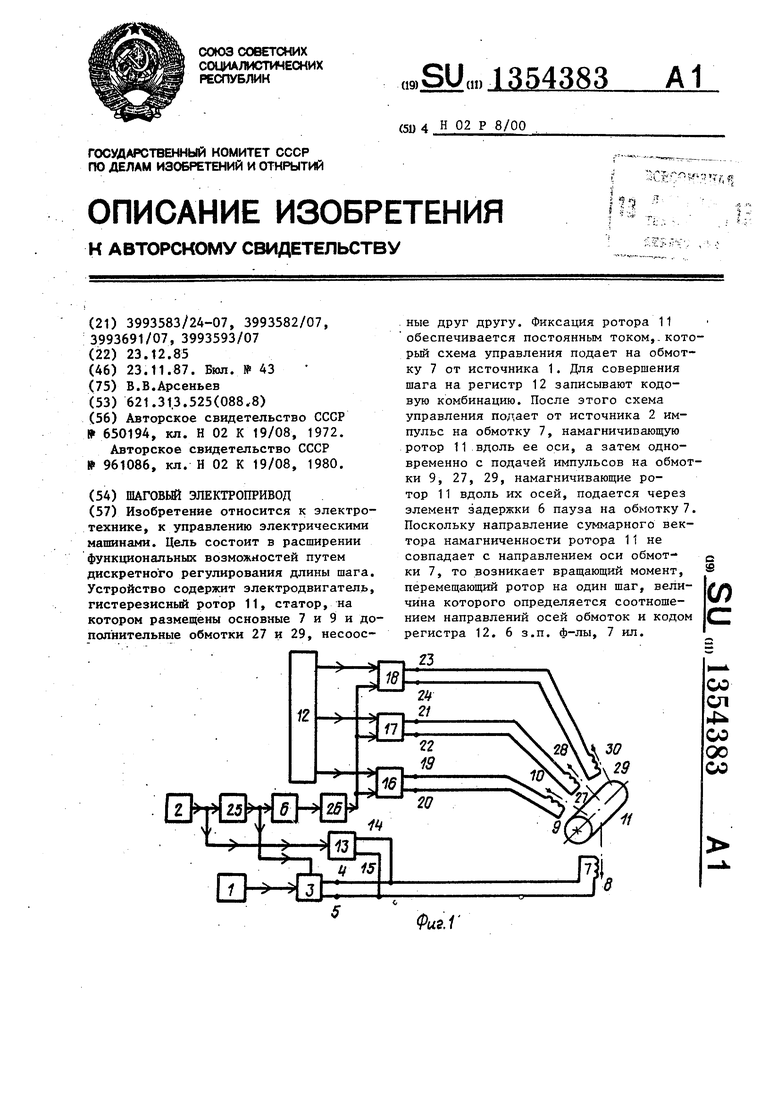
18
i2
f7
23
2V
гг
f
30
a
8
.ff
1
f0
12
7
ф 4
И
ff
IIIF
Л
Фи.7
Составитель В.Алфимов Редактор В.Петраш Техред и.Верес Корректор М.Пожо
Заказ 5711/53 Тираж 659 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д, 4/5
Производственно-полиграфическое предприятие г.Ужгород, ул,Проектная, 4
| Инерционный электропривод | 1972 |
|
SU650194A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Инерционный электропривод | 1980 |
|
SU961086A2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
