элемент датчика. В одну из диагоналей моста включен регулятор 6, связанный с электродвигателями 7, 8 рулевого управления 9,
Питается устройство от высокочастотного генератора 10.
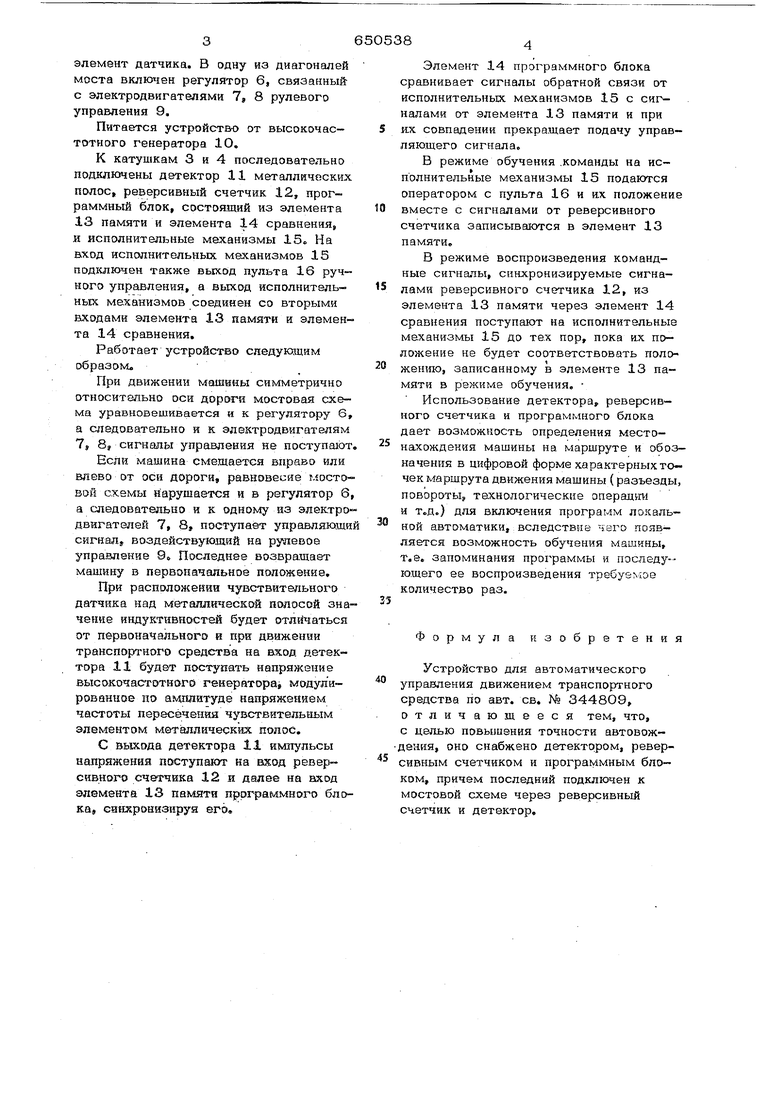
К катушкам 3 и 4 последовательно подключены детектор 11 металлических полос, реверсивный счетчик 12, программный блок, состоящий из элемента 13 памяти и элемента 14 сравнения, и исполнительные механизмы 15« На вход исполнительных механизмов 15 подключен также выход пульта 16 ручного управления, а выход исполнительных механизмов соединен со вторыми входами элемента 13 памяти и элемента 14 сравнения.
Работает устройство следующим образом.
При движении маш51ны симметрично относительно оси дороги мостовая схема уравновешивается и к регулятору 6, а следовательно и к электродвигателям 7} 8, сигнальг управления не поступают
Если машина смещается вправо или влево от оси дороги, равновесие г.шстоBofs схемы нарушается и в регулятор 6 а следовательно и к одному йз электродвигателей 7, 8, поступает управляющи сигнал в03действующий на рулевое управление 9 Последнее возвращает машину в первоначальное положение.
При распологкейИй чувствительнох о датчика над металлической полосой значение индуктивностей будет отличаться от первоначального и при движении транспортного средства на аход детектора 11 будет поступать напряжение высокочастотн&го генератора модулированное по амплитуде напряжением частоты пересечения чувствительным элементом металлических полос.
С выхода детектора 11 импульсы напряжения поступают на вход реверсивного счетчика 12 и далее на вход элемента 13 памяти программного блока, санхронизируя его.
Элемент 14 программного блока сравнивает сигналы обратной связи от исполнительных механизмов 15 с сигналами от элемента 13 памяти и при их совпадении прекращает подачу управляющего сигнала,
В режиме обучения .команды на исполнительные механизмы 15 подаются оператором с пульта 16 и их положение вместе с сигналами от реверсивного счетчика записываются в элемент 13 памяти.
В режиме воспроизведения командные сигналы, синхронизируемые сигналами реверсивного счетчика 12, из элемента 13 памяти через элемент 14 сравнения поступают на исполнительные механизмы 15 до тех пор, пока их положение не будет соответствовать положению, записанному в элементе 13 памяти в режиме обучения.
Использование детектора, реверсивного счетчика и программного блока дает возможность определения место- нахождения машины на маршруте и обозначения в цифровой форме характерных точек маршрута движения машины (разъезды, повороты твхнологическне onepauHVi и т.д.) для включения программ локальной автоматики, вследствие чего появляется возможность обучения машины, т.е. запоминания программы и последу-ющего ее воспроизведения требуемое
количество раз. 5
Формула изобретения
Устройство для автоматического управления движением транспортного средства по авт. св. № 344809, отличающееся тем, что, с целью повыл1ения точности автовож- дения, оно снабжено детектором, реверсивным счетчиком и програ1у1мным блоком, причем последний подключен к мостовой схеме через реверсивный счетчик и детектор.
97
Pewuivi обучения Socr pou3SedeHt-f
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ВОЖДЕНИЮ ВОЕННЫХ ГУСЕНИЧНЫХ МАШИН С РУЛЕВЫМ УПРАВЛЕНИЕМ | 2013 |
|
RU2542694C1 |
| Обучающее устройство | 1980 |
|
SU890427A1 |
| Обучающее устройство | 1978 |
|
SU744711A1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ВОЖДЕНИЮ ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2131146C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАСХОДОМ КЛУБНЕЙ КАРТОФЕЛЕПОСАДОЧНОЙ МАШИНЫ | 1991 |
|
RU2034430C1 |
| Устройство для формирования управляющих программ | 1985 |
|
SU1257616A1 |
| Устройство для управления гидравлическим экскаватором | 1989 |
|
SU1778249A1 |
| ТРЕНАЖЕР ДЛЯ ПОДГОТОВКИ МЕХАНИКОВ-ВОДИТЕЛЕЙ ПОДВИЖНЫХ КОМПЛЕКСОВ ВООРУЖЕНИЯ | 2019 |
|
RU2711047C1 |
| Обучающее устройство | 1979 |
|
SU809320A1 |

