Изобретение относится к землеройной технике, а именно к системам управления гидравлическими экскаваторами.
Известен гидравлический одноковшовый экскаватор, содержащий поворотную платформу с кабиной и приводным двигателем, установленную на раму с колесами, шарнирно сочлененную стрелу со сдвоенным насосом с регулятором мощности и автоматами разгрузки, пульт ручного управления, гидравлические исполнительные механизмы стрелы, ковша и гидрораспределители управления, синус-косинусные функциональные преобразователи углов наклона элементов рабочего оборудования, установленных на рабочих органах, и аналоговую счетно-решающую схему.
Однако автоматизация лишь двух приводов рабочих органов ограничивает возможности машины, требует постоянного присутствия водителя на экскаваторе, что снижает экономичность работы экскаватора. Установка синус- косинусных функциональных преобразователей на рабочие органы снижает надежность работы экскаватора при копании.
Известна электрическая следящая система управления гидроприводом рабочего оборудования одноковшового экскаватора, включающая моделирующий рычаг управления, датчики положения звеньев этого рычага и рабочего оборудования, усилители рассогласования, сумматоры, датчик расхода.
V4 v| 00 Ю Ч)
31
Однако данная система управления является аналоговой, а не дискретной, т.е. более сложной и дорогой. При разработке грунта на датчики попадают пыль и грунт, а также следует учитывать возможность силовых воздействий на датчики, что снижает надежность работы экскаватора. В дан ной системе моделируется движение совмещенного рычага управления лишь тремя исполнительными механизмами.
Наиболее близким техническим реже1 нием (прототипом) является устройство для автоматического управления гидравлическим экскаватором, содержа щее следящие гидроприводы исполнительных механизмов с питающим насосом и с электромеханическими преобра зователями, разработанное ЦНИИОМТП.
Однако подобного рода следящие устройства не полностью освобождают машиниста от трудоемкого управления экскаватором при операциях копания и планировки под заданную отметку. Машинисту приходится монотонно с ограниченной скоростью перемещать рычаги управления по заданной траектории, что связано с затратами нервной и мускульной энергии, утомляет машиниста и снижает производительность работы. Л размещение датчиков на рабочих органах, особенно на ковше, постоянно находящегося в зоне копания, снижает надежность функционирования экскаватора.
Целью изобретения является повышение надежности работы экскаватора.
Эта цель достигается тем, что устройство для автоматического управления гидравлическим экскаватором, содержащее следящие гидроприводы исполнительных механизмов с питаю щим насосом и с электромеханическими преобразователями, согласГно изобретению, снабжено блоком записи задания, блоком ручного управления с 1механоэлектрическими преобразователя1 ми и блоком программного управления, причем блок ручного управления через механоэлектрические преобразователи, количество которых равно количеству исполнительных механизмов, связан с блоком записи задания, который, в свою очередь, связан с шаговыми элек тромеханическими преобразователями и приводом опорных башмаков через соответствующие им линии управления,
к которым через ключи подсоединен блок программного управления.
Эта цель достигается также тем, что для разгрузки питающего насоса устройство управления снабжено двумя логическими элементами ИЛИ-НЕ, причем блоки программного управления и записи задания по линиям уп10 равления каждого исполнительного механизма через импульсно-дискрет- ные преобразователи подключены симметрично к входам элементов ИЛИ-НЕ, выходы которых подключены к автома15 там разгрузки соответствующих им секций питающего насоса, а первая линия управления приводами опорных башмаков соединена напрямую с первым входом их гидрораспределителя,
20 соединенного непосредственно с приводами опорных башмаков. Гидроприводы опорных башмаков соединены с реле давления, выходы которых подсоединены к входам элемента И, вы25 ход последнего подсоединен к минусовому входу элемента ЗАПРЕТ. К плюсовому входу элемента ЗАПРЕТ подсоединена вторая линия управления опорными башмаками, а его выход под30 соединен к второму входу гидрораспределителя привода опорных башмаков и одному из входов соответствующего ему элемента ИЛИ-НЕ.
В рассматриваемом техническом ре35 шении в блоке записи задания идет запись на магнитную ленту движения всех основных механизмов экскаватора, а затем осуществляется их работа в автоматическом режиме благодаря
40 дискретной системе управления. Ввод предлагаемого автоматического устройства управления в экскаватор повышает надежность его работы, расширяет функциональные возможности, улуч45 шает экономичность, позволяет осуществить многомашинное обслуживание при эксплуатации экскаваторов.
Из вышесказанного можно сделать вывод, что заявленное техническое ре50 шение отвечает критерию существенные отличия. Наличие вышеуказанных признаков в предлагаемом техническом решении приводит к получению нового положительного эффекта.
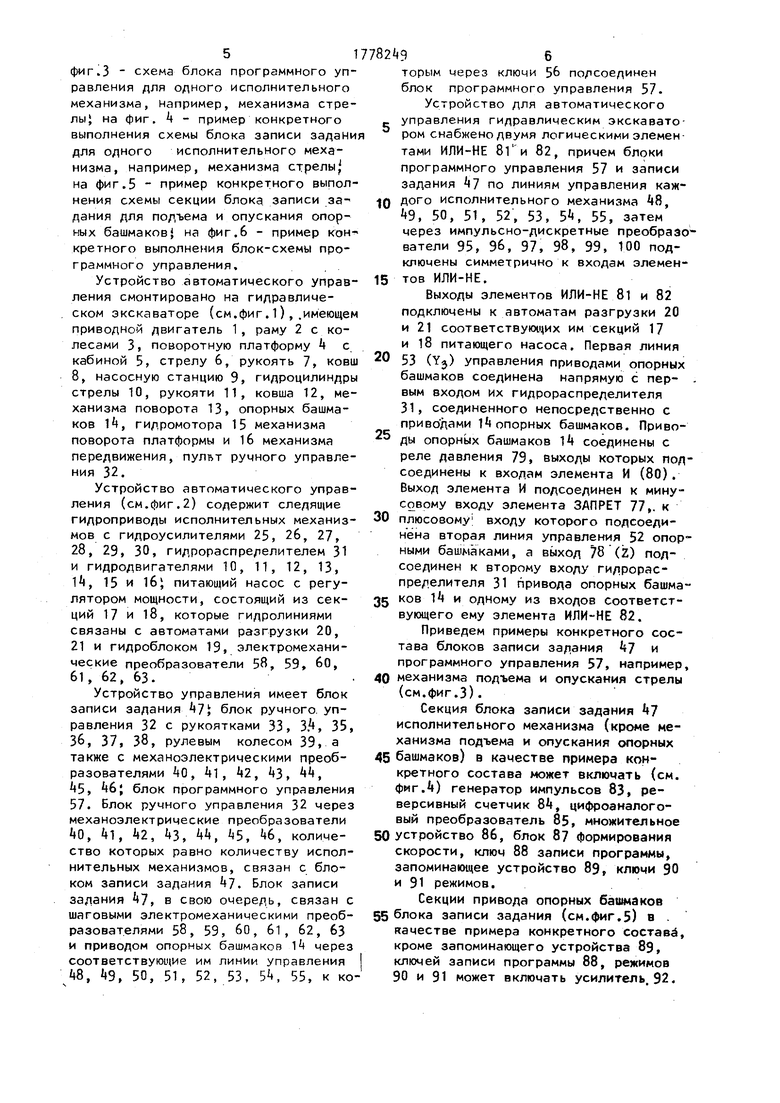
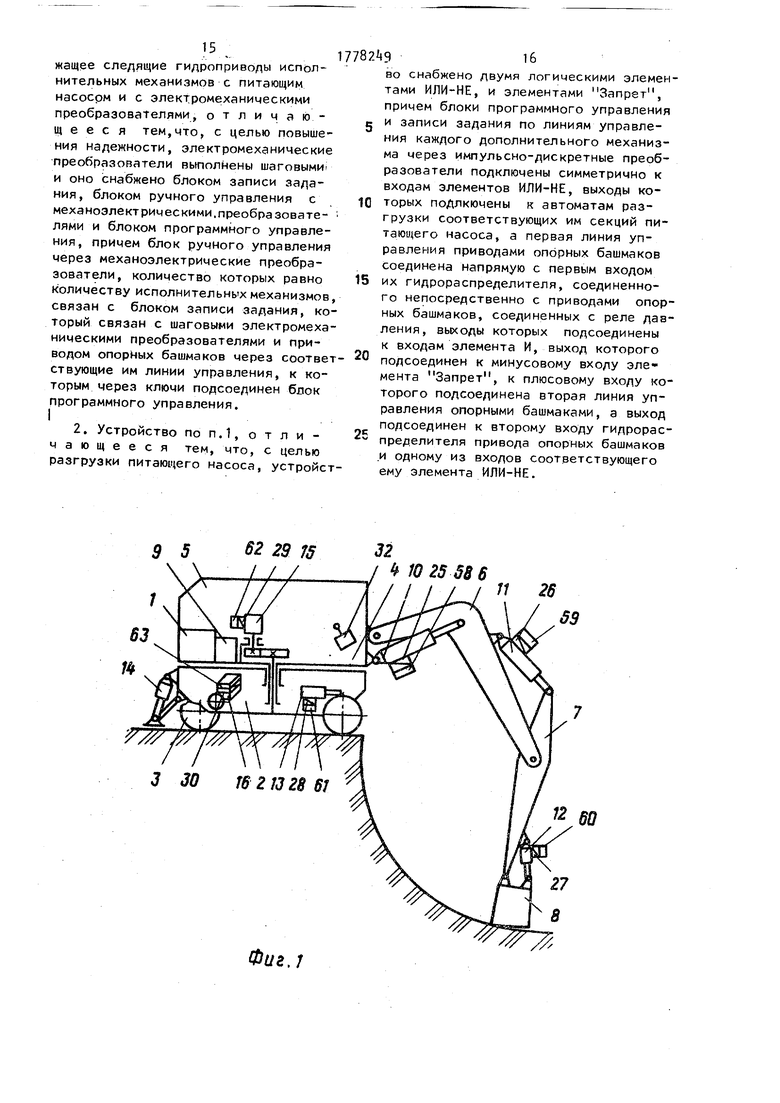
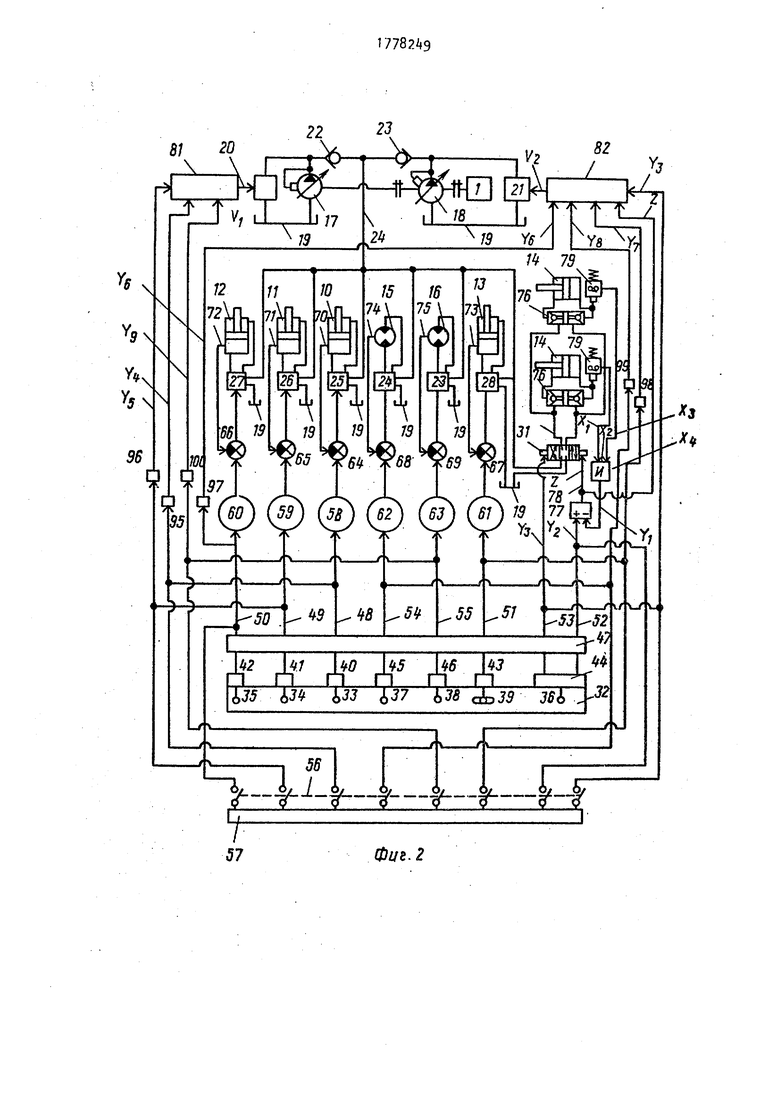
На фиг.1 представлена схема расположения на экскаваторе основных исполнительных механизмов устройства управления на фиг.2 - принципиальная схема устройства управления, на
51
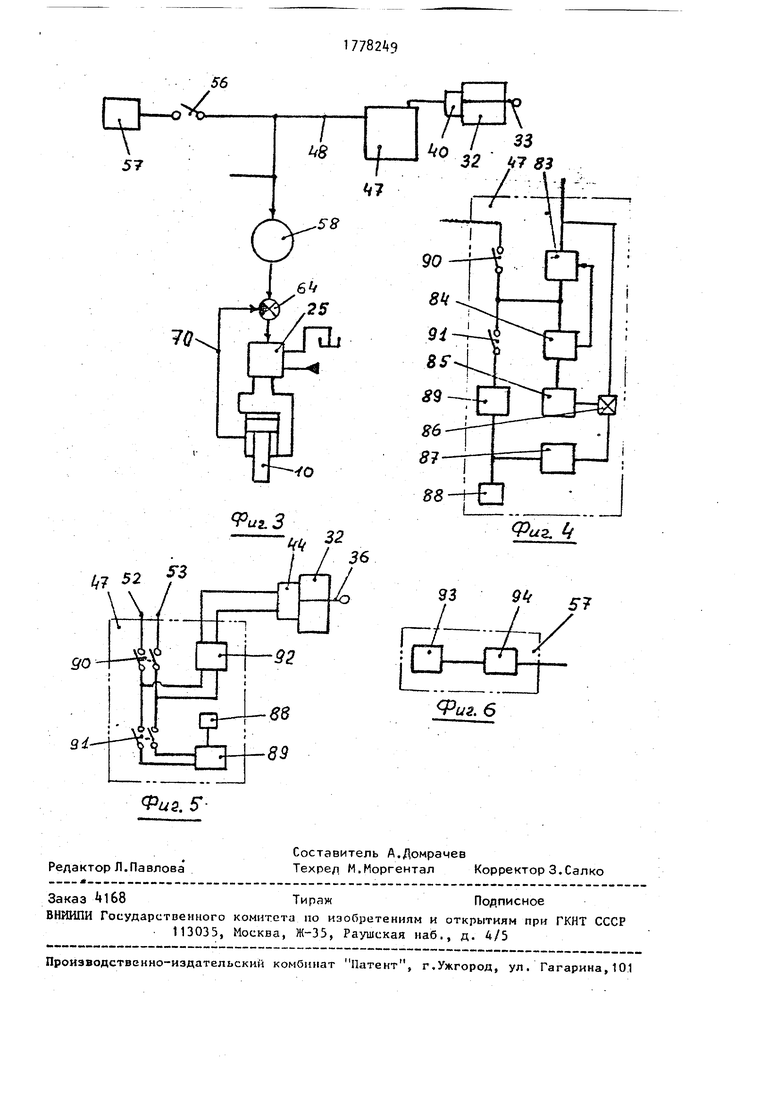
фиг.З схема блока программного управления для одного исполнительного механизма, например, механизма стрелы на фиг. А - пример конкретного выполнения схемы блока записи задани для одного исполнительного механизма, например, механизма стрелы, на фиг.5 - пример конкретного выполнения схемы секции блока, записи задания для подъема и опускания опорных башмаков} на фиг.6 - пример конкретного выполнения блок-схемы программного управления.
Устройство автоматического управления смонтировано на гидравлическом экскаваторе (см.фиг.1), .имеющем приводной двигатель 1, раму 2 с колесами 3, поворотную платформу А с кабиной 5, стрелу 6, рукоять 7, ковш 8, насосную станцию 9, гидроцилиндры стрелы 10, рукояти 11, ковша 12, механизма поворота 13, опорных башмаков 1А, гидромотора 15 механизма поворота платформы и 16 механизма передвижения, пульт ручного управления 32.
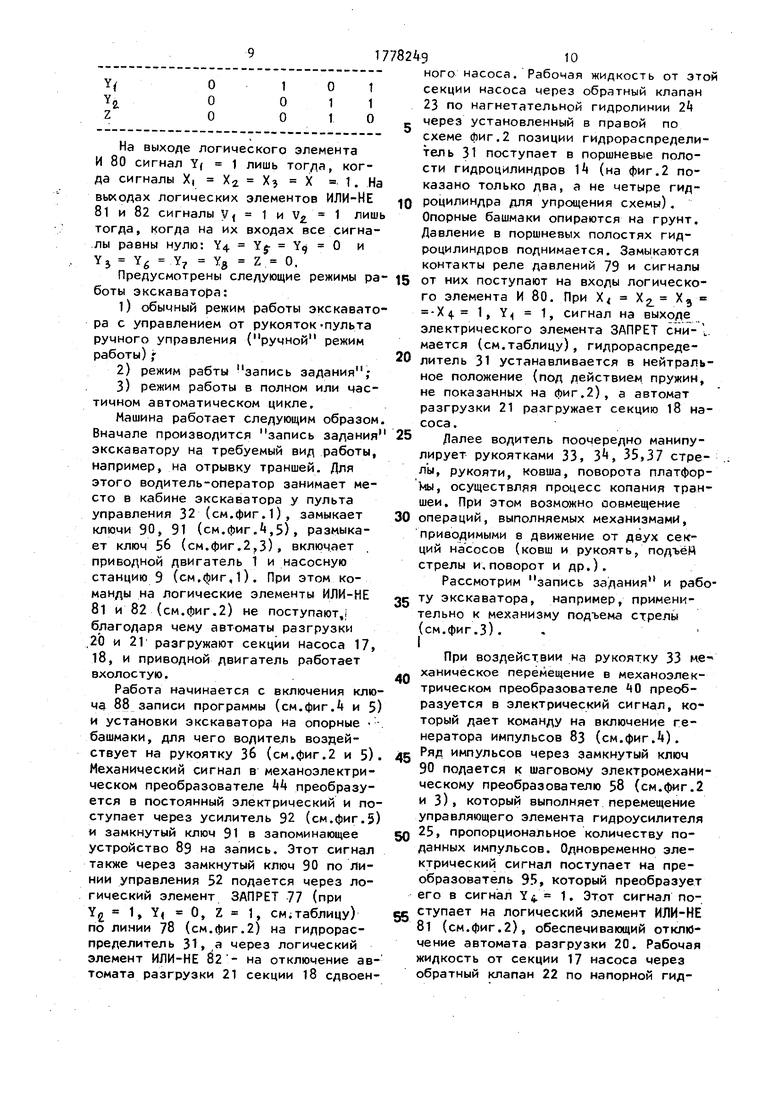
Устройство автоматического управления (см.фиг.2) содержит следящие гидроприводы исполнительных механизмов с гидроусилителями 25, 26, 27, 28, 29, 30, гидрораспределителем 31 и гидродвигателями 10, 11, 12, 13, 1, 15 и 16} питающий насос с регулятором мощности, состоящий из секций 17 и 18, которые гидролиниями связаны с автоматами разгрузки 20, 21 и гидроблоком 19, электромеханические преобразователи 58, 59, 60, 61, 62, 63.
Устройство управления имеет блок записи задания k блок ручного управления 32 с рукоятками 33, З.А, 35, 36, 37, 38, рулевым колесом 39, а также с механоэлектрическими преобразователями АО, А1 , А2, A3, АА, 5, А6; блок программного управления 57. Блок ручного управления 32 через механоэлектрические преобразователи АО, Al, А2, A3, АА, А5, А6, количество которых равно количеству исполнительных механизмов, связан с блоком записи задсЖия А7. Блок записи задания А, в свою очередь, связан с шаговыми электромеханическими преобразователями 58, 59, 60, 61, 62, 63 и приводом опорных башмаков 1А через соответствующие им линии управления А8, А9, 50, 51, 52, 53, 5А, 55, к ко
6
торым через ключи 56 подсоединен блок программного управления 57. Устройство для автоматического управления гидравлическим экскавато ром снабжено двумя логическими элемен тами ИЛИ-НЕ 81 и 82, причем блоки программного управления 57 и записи задания А7 по линиям управления кажQ дого исполнительного механизма А8, А9, 50, 51, 52, 53, 5А, 55, затем через импульсно-дискретные преобразо- ватели 95, 96, 97, 98, 99, 100 подключены симметрично к входам элементов ИЛИ-НЕ.
Выходы элементов ИЛИ-НЕ 81 и 82 подключены к автоматам разгрузки 20 и 21 соответствующих им секций 17 и 18 питающего насоса. Первая линия
0 53 (Yj) управления приводами опорных башмаков соединена напрямую с пер- - вым входом их гидрораспределителя 31, соединенного непосредственно с приводами 1А опорных башмаков. Приво5 ды опорных башмаков 1А соединены с реле давления 79, выходы которых подсоединены к входам элемента И (80). Выход элемента И подсоединен к минусовому входу элемента ЗАПРЕТ 77,. к плюсовому входу которого подсоединена вторая линия управления 52 опорными башмаками, а выход 78 (Z) подсоединен к второму входу гидрорас- прелелителя 31 привода опорных башмаков 1А и одному из входов соответствующего ему элемента ИЛИ-НЕ 82.
Приведем примеры конкретного состава блоков записи задания А7 и программного управления 57, например,
0 механизма подъема и опускания стрелы (см.фиг.3).
Секция блока записи задания А7 исполнительного механизма (кроме механизма подъема и опускания опорных
5 башмаков) в качестве примера конкретного состава может включать (см. фиг.А) генератор импульсов 83, реверсивный счетчик 8А, цифроаналого- вый преобразователь 85, множительное
0 устройство 86, блок 87 формирования скорости, ключ 88 записи программы, запоминающее устройство 89, ключи 90 и 91 режимов.
Секции привода опорных башмаков
5 блока записи задания (см.фиг.5) в качестве примера конкретного составе, кроме запоминающего устройства 89, ключей записи программы 88, режимов 90 и 91 может включать усилитель. 92.
0
5
Секции блока программного управления 57 в качестве примера конкретного состава для всех исполнительных механизмов могут быть выполнены одинаково и включать (см.фиг.6) блок считывания 93, а также усилительный и коммутирующий блок1 94.
Устройство блоков записи задания 4 и программного управления 58 из- вестно из литературы (см.например, Патон Б.Е., Спыну Г.А., Тимошен ко В.Г. Промышленные работы для сварки.- Киев: Наукова думка, 1977 г.), где на стр.131 представлено устрой- ство и описание работы блока записи задания (см.также стр.142). Здесь же описаны элементы, входящие в состав блоков записи задания и управления, а именно реверсивный счетчик 84 - стр.143,генератор импульсов 83 - стр.131, запоминающее устройство 89 - стр.133 и 36, блок формирования скорости 87 - стр.131, UtO, М, Ь5 и т.д., а также их взаимодействие меж- ду собой.
Множительное устройство также известно из литературы (см.стр.31б книги Словарь по кибернетике, под. ред.Глушкова В.М., гл.ред.Укр.Сов. энциклопедии, Киев, 1979 г., а также стр.300 и 486 книги Энциклопедия современной техники. Советская энциклопедия, М., 19&3 г.
Возможно использовать и другие известные из литературы варианты конструкций блоков записи задания и программного управления 47 и 57, однако в каждый блок записи задания должен входить генератор импульсов.
Реализация дистанционной взаимосвязи экскаватора и его системы управления с оператором осуществляется при помощи дистанционного пульта управления, который имеет кнопочную конструкцию с кнопками Пуск в автоматическом режиме, Стоп и сигнализатор перегрузки. Этот пульт связан с экскаватором кабельной или радиосвязью. В качестве сигнализатора перегрузок применяется устройство, подающее сретовой или звуковой сигнал.
При движении гидроцилиндров 14 (см.фиг.1 и 2) колеса экскаватора не должны отрываться от земли. Поэтому реле давления 79 настраиваются на давление, при котором колеса экскаватора практически разгружены, но они
не оторвались от грунта, то-есть воспринимают незначительную часть массы экскаватора.
Функциональная связь между элементами схем (например, между генераторами 83 и счетчиком 84) на функциональных блок-схемах показаны одной линией. Заявитель руководствовался при этом общими правилами сое- тавления функциональных и структурны схем (см.стр.31 книги Васильева Д.В. Чуича В.Г. Системы автоматического управления. М.: Высшая школа, 1977 г)
Генератор импульсов 83 формирует, импульсы одной полярности. Для перемещения рабочих механизмов в двух противоположных направлениях меняются входы на коммутационной плате устройства питания шаговых электромеханических преобразователей. При этом также меняется очередность включения обмоток фаз шаговых преобразователей
58...63 (см.фиг.2), которые установлены на входах гидроусителей 25... 30 (см., например, стр.108 книги Ратмирова. В.А,, Ивоботенко Б,А. Шаговые двигатели для систем автоматического управления. М.: Госэнер- гоиздат, 1972 г., а также стр.23 книги Патон Б.Е. и др. Промышленные работы для сварки. Киев: Наукова думка, 1977 г.).
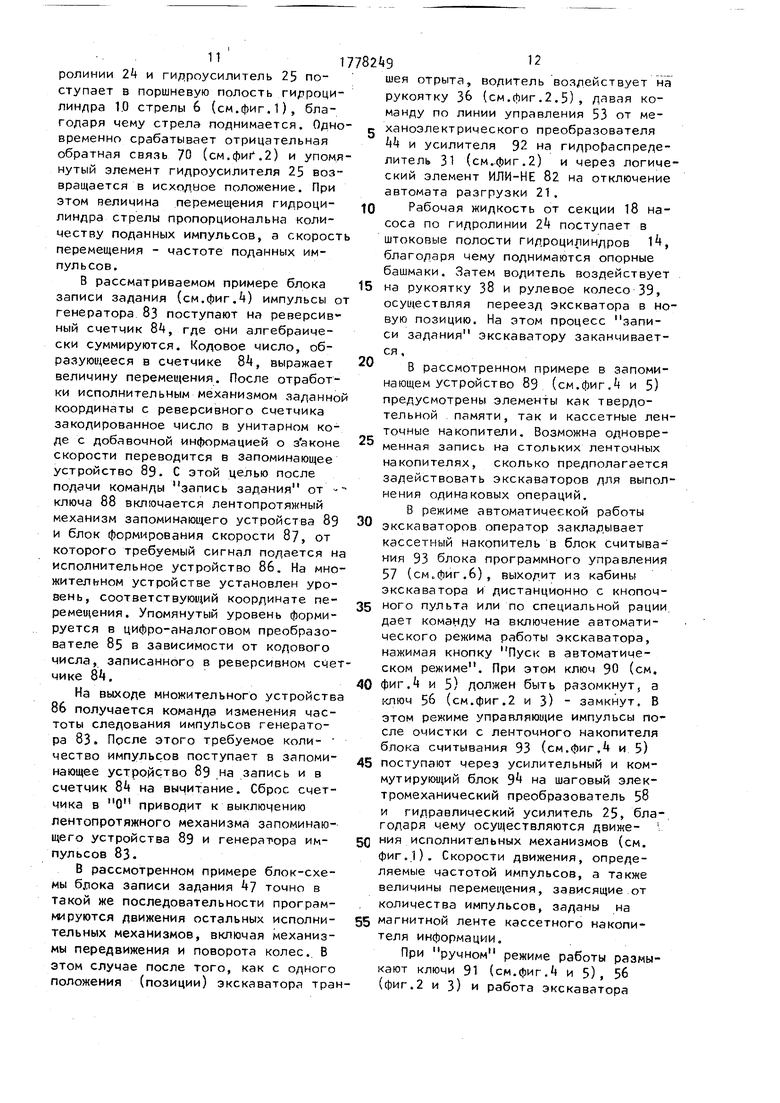
На выходах реле давления 79 действуют сигналы (см.фиг.2) Х4, Х2, Хз Хф (на Аиг.2 условно показаны только два, а не четыре гидроцилиндра 14, гидрозамка 76, реле давления 79), на выходе логического элемента И 80, линиях управления 52, 53 блока записи задания 47, выходах преобразователей 95, 96, 97, 98, 99, 100- сигналы V1f Y2, У,, Y4, Y, Y6, Y7, Ygs Ґ9, ня выходе логического элемента ЗАПРЕТ 77 - сигнал Я, на выходах логических элементов ИЛИ-НЕ 81 и 82 - сигналы V и vz. Сигналы Х(...Х4, Y..., Z, V, , V% могут принимать два уровня значений: Ои1.
i
Преобразователи 95,...,100 преобразуют сигналы в виде пакета импульсов в сигнал с уровнем значения 1. При отсутствии сигналов в линиях 48, 9, 50, 54, 55 сигнал на выходе преобразователей 95...100 имеет уровень 0. Ниже представлена таблица состояний логического элемента ЗАПРЕТ 77.
На выходе логического элемента И 80 сигнал Yf 1 лишь тогда, когда сигналы X, Х2 Х X 1. На выходах логических элементов ИЛИ-НЕ 81 и 82 сигналы V 1 и V2 1 лишь тогда, когда на их входах все сигналы равны нулю: Ґ4 Yj- Y 0 и
Yj Y6
Y7 Yg - Z 0.
ного насоса. Рабочая жидкость от этой секции насоса через обратный клапан 23 по нагнетательной гидролинии 2k f. через установленный в правой по схеме Лиг.2 позиции гидрораспредели- тель 31 поступает в поршневые полости гидроцилиндров И (на фиг.2 показано только два, а не четыре гид- 10 роцилиндра для упрощения схемы). Опорные башмаки опираются на грунт. Давление в поршневых полостях гидроцилиндров поднимается. Замыкаются контакты реле давлений 79 и сигналы
Предусмотрены следующие режимы ра- 45 от них поступают на входы логическоботы экскаватора:
1)обычный режим работы экскаватора с управлением от рукояток-пульта ручного управления (ручной режим работы) ,
2)режим рабты запись задания ;
3)режим работы в полном или частичном автоматическом цикле.
Машина работает следующим образом. Вначале производится запись задания 25 экскаватору на требуемый вид работы, например, на отрывку траншей. Для этого водитель-оператор занимает место в кабине экскаватора у пульта управления 32 (см.фиг.1), замыкает ключи 90, 91 (см.фиг. 1, 5), размыкает ключ 56 (см.фиг.), включает . приводной двигатель 1 и насосную станцию 9 (см.фиг,1). При этом команды на логические элементы ИЛИ-НЕ 81 и 82 (см.фиг.2) не поступают,, благодаря чему автоматы разгрузки .20 и 21 разгружают секции насоса 17, 18, и приводной двигатель работает вхолостую.
Работа начинается с включения ключа 88 записи программы (см.фиг.А и 5) и установки экскаватора на опорные башмаки, для чего водитель воздействует на рукоятку 36 (см.фиг.2 и 5). Механический сигнал в механоэлектри- ческом преобразователе й преобразуется в постоянный электрический и поступает через усилитель 92 (см.фиг.5) и замкнутый ключ 91 в запоминающее устройство 89 на запись. Этот сигнал также через замкнутый ключ 90 по Линии управления 52 подается через логический элемент ЗАПРЕТ 77 (при
YЈ 1, Y - О, Z 1, см.таблицу) по линии 78 (см.фиг.2) на гидрорас- пределитель 31, ,а через логический элемент ИЛИ-НЕ на отключение автомата разгрузки 21 секции 18 сдвоенго элемента И 80. При Х Х -Х4 1, Y 1, сигнал на выходе электрического элемента ЗАПРЕТ сни- ь мается (см.таблицу), гидрораспреде20 литель 31 устанавливается в нейтральное положение (под действием пружин, не показанных на фиг.2), а автомат разгрузки 21 разгружает секцию 18 насоса.
Лалее водитель поочередно манипулирует рукоятками 33, 3, 35,37 стрелы, рукояти, ковша, поворота платфор- )ы, осуществляя процесс копания траншеи. При этом возможно совмещение
30 операций, выполняемых механизмами,
приводимыми в движение от двух секций насосов (ковш и рукоять, подъеН стрелы и,поворот и др.).
Рассмотрим запись задания и рзбо 35 ТУ экскаватора, например, применительно к механизму подъема стрелы (см.фиг.3).
40
При воздействии на рукоятку 33 механическое перемещение в механоэлек- трическом преобразователе 0 преобразуется в электрический сигнал, который дает команду на включение генератора импульсов 83 (см.фиг.). 45 РЯР импульсов через замкнутый ключ 90 подается к шаговому электромеханическому преобразователю 58 (см.фиг.2 и 3), который выполняет перемещение управляющего элемента гидроусилителя 25, пропорциональное количеству поданных импульсов. Одновременно электрический сигнал поступает на преобразователь 95, который преобразует его в сигнал Y4. 1. Этот сигнал поступает на логический элемент ИЛИ-НЕ 81 (см.фиг.2), обеспечивающий отключение автомата разгрузки 20. Рабочая жидкость от секции 17 насоса через обратный клапан 22 по напорной гид50
55
ного насоса. Рабочая жидкость от этой секции насоса через обратный клапан 23 по нагнетательной гидролинии 2k f. через установленный в правой по схеме Лиг.2 позиции гидрораспредели- тель 31 поступает в поршневые полости гидроцилиндров И (на фиг.2 показано только два, а не четыре гид- 10 роцилиндра для упрощения схемы). Опорные башмаки опираются на грунт. Давление в поршневых полостях гидроцилиндров поднимается. Замыкаются контакты реле давлений 79 и сигналы
го элемента И 80. При Х Х -Х4 1, Y 1, сигнал на выходе электрического элемента ЗАПРЕТ сни- ь мается (см.таблицу), гидрораспределитель 31 устанавливается в нейтральное положение (под действием пружин, не показанных на фиг.2), а автомат разгрузки 21 разгружает секцию 18 насоса.
Лалее водитель поочередно манипулирует рукоятками 33, 3, 35,37 стрелы, рукояти, ковша, поворота платфор- )ы, осуществляя процесс копания траншеи. При этом возможно совмещение
операций, выполняемых механизмами,
приводимыми в движение от двух секций насосов (ковш и рукоять, подъеН стрелы и,поворот и др.).
Рассмотрим запись задания и рзбо- ТУ экскаватора, например, применительно к механизму подъема стрелы (см.фиг.3).
При воздействии на рукоятку 33 механическое перемещение в механоэлек- трическом преобразователе 0 преобразуется в электрический сигнал, который дает команду на включение генератора импульсов 83 (см.фиг.). РЯР импульсов через замкнутый ключ 90 подается к шаговому электромеханическому преобразователю 58 (см.фиг.2 и 3), который выполняет перемещение управляющего элемента гидроусилителя 25, пропорциональное количеству поданных импульсов. Одновременно электрический сигнал поступает на преобразователь 95, который преобразует его в сигнал Y4. 1. Этот сигнал поступает на логический элемент ИЛИ-НЕ 81 (см.фиг.2), обеспечивающий отключение автомата разгрузки 20. Рабочая жидкость от секции 17 насоса через обратный клапан 22 по напорной гид
11
ролинии 24 и гидроусилитель 25 поступает в поршневую полость гидроцилиндра 10 стрелы 6 (см.фиг.1), благодаря чему стрела поднимается. Одновременно срабатывает отрицательная обратная связь 70 (см.фиг1.2) и упомянутый элемент гидроусилителя 25 возвращается в исходное положение. При этом величина перемещения гидроцилиндра стрелы пропорциональна количеству поданных импульсов, а скорость перемещения - частоте поданных импульсов.
В рассматриваемом примере блока записи задания (см.фиг.4) импульсы от генератора 83 поступают на реверсивный счетчик 84, где они алгебраически суммируются. Кодовое число, образующееся в счетчике 8, выражает величину перемещения. После отработки исполнительным механизмом заданной координаты с реверсивного счетчика закодированное число в унитарном коде с добавочной информацией о з аконе скорости переводится в запоминающее устройство 89. С этой целью после подачи команды запись задания от - - ключа 88 включается лентопротяжный механизм запоминающего устройства 89 и блок формирования скорости 87, от которого требуемый сигнал подается на исполнительное устройство 86. На множительном устройстве установлен уровень, соответствующий координате перемещения. Упомянутый уровень формируется в цифро-аналоговом преобразователе 85 в зависимости от кодового числа, записанного в реверсивном счетчике 84.
На выходе множительного устройства 86 получается команда изменения частоты следования импульсов генератора 83. После этого требуемое коли- чество импульсов поступает в запоминающее устройство 89 на запись и в счетчик 8 на вычитание. Сброс счетчика в О приводит к выключению лентопротяжного механизма запоминающего устройства 89 и генератора импульсов 83.
В рассмотренном примере блок-схемы блока записи задания 47 точно в такой же последовательности программируются движения остальных исполнительных механизмов, включая механизмы передвижения и поворота колес. В этом случае после того, как с одного положения (позиции) экскаватора тран
824912
шея отрыта, водитель воздействует на рукоятку 36 (см.Лиг.2.5), давая команду по линии управления 53 от ме- с ханоэлектрического преобразователя 44 и усилителя 92 на гидрораспределитель 31 (см.фиг.2) и через логический элемент ИЛИ-НЕ 82 на отключение автомата разгрузки 21. 10 Рабочая жидкость от секции 18 насоса по гидролинии 24 поступает в штоковые полости гидроцилиндров 1, благодаря чему поднимаются опорные башмаки. Затем водитель воздействует 15 на рукоятку 38 и рулевое колесо 39, осуществляя переезд экскватора в но0
5
0
5
вую позицию. На этом процесс записи задания экскаватору заканчивается ,
В рассмотренном примере в запоминающем устройство 89 (см.фиг.4 и 5) предусмотрены элементы как твердотельной памяти, так и кассетные ленточные накопители. Возможна одновременная запись на стольких ленточных накопителях, сколько предполагается задействовать экскаваторов для выполнения одинаковых операций.
8 режиме автоматической работы экскаваторов оператор закладывает кассетный накопитель в блок считывания 93 блока программного управления 57 (см.Лиг.6), выходит из кабины экскаватора и дистанционно с кнопочного пульта или по специальной рации дает команду на включение автоматического режима работы экскаватора, нажимая кнопку Пуск в автоматическом режиме. При этом ключ 90 (см,
0 фиг.4 и 5) должен быть разомкнут, а ключ 56 (см.фиг.2 и 3) - замкнут. В этом режиме управляющие импульсы после очистки с ленточного накопителя блока считывания 93 (см.фиг.4 и 5) поступают через усилительный и коммутирующий блок 9 на шаговый электромеханический преобразователь 58 и гидравлический усилитель 25, благодаря чему осуществляются движения исполнительных механизмов (см. фиг.1). Скорости движения, определяемые частотой импульсов, а также величины перемещения, зависящие от количества импульсов, заданы на
5 магнитной ленте кассетного накопителя информации.
При ручном режиме работы размыкают ключи 91 (см.фиг.4 и 5), 56 (фиг.2 и 3) и работа экскаватора
5
0
13
проводится
II
так же, задания
и
как в режиме
запись задания за исключением того, что здесь запись программы не производится.
Возможна также частичная автоматизация работы экскаватора, например, автоматизация только процессов копания с переездом экскаватора на новую позицию с помощью оператора, автоматизация нескольких элементов операции процесса копания (стрела - рукоять - ковш, стрела - поворот и др.). Такая автоматизация позволяет снизить утомляемость оператора, и следовательно, повысить надежность .производительность экскаватора. В этом случае по схеме фиг.2 может быть выполнено управление лишь тех механизмов, которые подлежат автоматизации, а остальные механизмы выполняются по известным схемам.
В процессе работы возможны откло- нения от заданной программы в силу различных причин. Оператор должен оценить такие отклонения и, если они достигли недопустимых величин, - кнопкой Стоп дистанционного пульта управления (на фиг. не показан) отключить работу экскаватора. Далее оператор должен переключить экскаватор на ручное управление и устранить отклонение от программы, после чего включить автоматический режим работы экскаватора.
В случае возникновения непреодолимого препятствия на пути движения одного из рабочих органов, например, ковша, повышается давление в напорно гидролинии 2k, открывается предохранительный клапан автомата разгрузки 20, через который секция 17 насоса подает рабочую жидкость обратно в ги роба к 19. При этом движение поршня
гидроцилиндра 12 ковша прекращается. 45 ских элементов ЗАПРЕТ, И обеспечива- 0 возникновении непреодолимого препят- ет надежную работу механизма опорных ствия движению ковша, рукояти и т.д.в башмаков в автоматическом цикле. При «автоматическом режиме работы экскава- работе оператор избавляется от много- тора сообщает оператору визуальный кратных повторений однообразных опе50 раций, снижается его утомляемость, появляется возможность многоэкскаваили звуковой сигнал, подаваемый с пульта управления 32, а также с выносного дистанционного пульта. Оператор отключает работу экскаватора, устраняется причина остановки, после чего снова включается режим автоматической работы.
Дискретный режим работы в рассматриваемой системе распространяется только до гидроусилителя, так как
торного обслуживания.
В заявке в качестве примера конкретного применения приведены соста- 55 вы блоков записи задания 7 и про граммного управления 57. Формула изобретения
1. Устройство для управления гидравлическим экскаватором, содер
- ,
йд-
7782А9,4
исполнительный следящий позиционный гидропривод обладает высокими демп- . фирующими и фильтрующими свойствами.
Ввиду простоты записи и перезаписи программы при записи задания в системе не предусмотрена возможность подналадочных режимов. Оператору проще стереть программу с магнитной ленты и записать ее заново, чем вводить в систему сложные блоки, реализующие подналадочные режимы..
Таким образом, установка на экскаваторе следящих гидравлических приводов с шаговыми электромеханическими преобразователями позволяет исключить главные обратные связи, убрать датчики с рабочих органо в, в том числе и с ковша, постоянно находящегося в зоне копания, что повышает надежность работы экскаватора и упрощает его конструкцию. Установка на экскаваторе блоков записи задания и программного управления рабочими органа10
15
20
25
30
35
40
ми, механизмами поворота платформы, - колес, передвижения и опорных башмаков позволяет сравнительно простыми средствами осуществить работу экскаватора в полном или частичном автоматическом цикле, применить многомашинное обслуживание нескольких экскаваторов одним водителем-оператором, - что повышает экономичность, производительность, расширяет функциональные возможности экскватора.
.Введение в систему управления экскаватора двух логических элементов ИЛИ-НЕ и наличие двухсекционного регулируемого насоса позволяет повысить экономичность и обеспечить надежную работу экскаватора при совмещении операций. Установка в механизмах опорных башмаков и разгрузки секций насоса реле давления, логичеторного обслуживания.
В заявке в качестве примера конкретного применения приведены соста- вы блоков записи задания 7 и про граммного управления 57. Формула изобретения
1. Устройство для управления гидравлическим экскаватором, содер15 ,
жащее следящие гидроприводы исполнительных механизмов с питающим насосрм и с электромеханическими преобразователями, отличающееся тем,что, с целью повышения надежности, электромеханические преобразователи выполнены шаговыми и оно снабжено блоком записи задания, блоком ручного управления с механоэлектрическими.лреобразовате- лями и блоком программного управления, причем блок ручного управления через механоэлектрические преобразователи, количество которых равно количеству исполнительных механизмов, связан с блоком записи задания, который связан с шаговыми электромеханическими преобразователями и приводом опорных башмаков через соответствующие им линии управления, к которым через ключи подсоединен блок программного управления. I
2. Устройство по п.1, о т л и - чающееся тем, что, с целью разгрузки питающего насоса, устройст177824916
во снабжено двумя логическими элементами ИЛИ-НЕ, и элементами Запрет, причем блоки программного управления с и записи задания по линиям управления каждого дополнительного механизма через импульсно-дискретные преобразователи подключены симметрично к входам элементов ИЛИ-НЕ, выходы которых подлкючены к автоматам разгрузки соответствующих им секций питающего насоса, а первая линия управления приводами опорных башмаков соединена напрямую с первым входом их гидрораспределителя, соединенного непосредственно с приводами опорных башмаков, соединенных с реле давления, выходы которых подсоединены к входам элемента И, выход которого подсоединен к минусовому входу элемента Запрет, к плюсовому входу которого подсоединена вторая линия управления опорными башмаками, а выход подсоединен к второму входу гидрораспределителя привода опорных башмаков и одному из входов соответствующего ему элемента ИЛИ-НЕ.
10
15
20
2S


| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД ОТКРЫВАНИЯ ДНИЩА КОВША ЭКСКАВАТОРА | 2020 |
|
RU2742674C1 |
| Устройство для управления драглайном | 1977 |
|
SU682607A1 |
| Устройство для измерения загрузки ковша экскаватора | 1983 |
|
SU1145099A1 |
| Система автоматизированного управления транспортными перемещениями ковша экскаватора-драглайна | 1989 |
|
SU1788163A1 |
| Радиотелеметрическое устройство контроля и учета работы шагающего экскаватора | 1987 |
|
SU1472573A1 |
| Гидросистема грузоподъемного крана | 1991 |
|
SU1765542A1 |
| Устройство защиты стрелы экскаваторадраглайна от растяжки | 1977 |
|
SU737576A1 |
| УСТРОЙСТВО для УЧЕТА РАБОТЫ ЭКСКАВАТОРА | 1968 |
|
SU217667A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
| Устройство для автоматического управления роторным экскаватором | 1980 |
|
SU899763A1 |
Изобретение относится к землеройной технике,а именно к системам управления гидравлическими экскаваторами. Сущность: устройство содержит блок программного упр., ключи, элементы ИЛИ-НЕ, автоматы разгрузки, блок ручного управления, механоэлек- трические преобразователи, блок записи задания, электромеханические преобразователи, элементы запрет и И, привод опорных башмаков, распределитель, приводы исполнительных механизмов. 1 з.п.ф-лы, 6 ил. Ё
9 562 29 7532
I / / / 4
+ S ii/11
J 30 16 213 2В 61
Фиг.
26
и 60
л
-эСЧ
оо
ч V:
| Устройство для автоматического управления экскаватором | 1977 |
|
SU692950A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Развитие систем управления одноковшовых гидравлических экскаваторов | |||
| Обзорная информация, выпуск 3, стр.20-27/ ( УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ ЭКСКАВАТОРОМ | |||
