12
Изобретение относится к автоматике и может быть использовано для программного управления объектами, в частности для управления станками с ЧПУ и роботами-минипуляторами.
Цель изобретения - повьшение быстродействия и точности устройства.
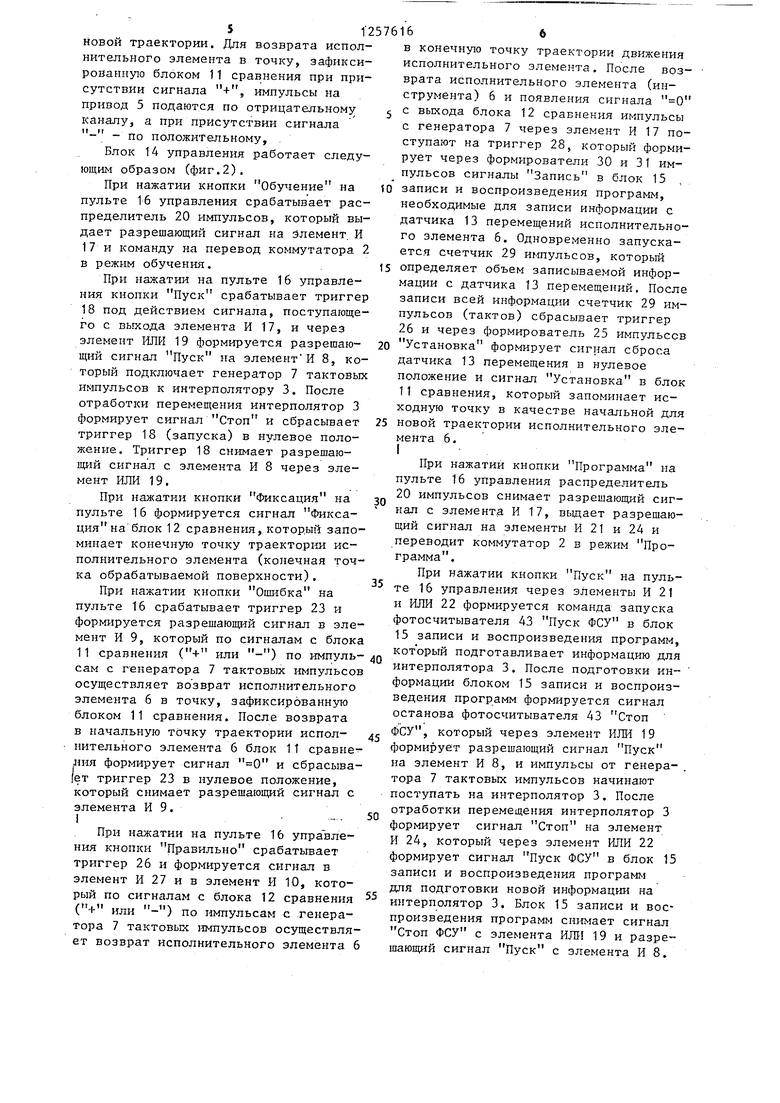
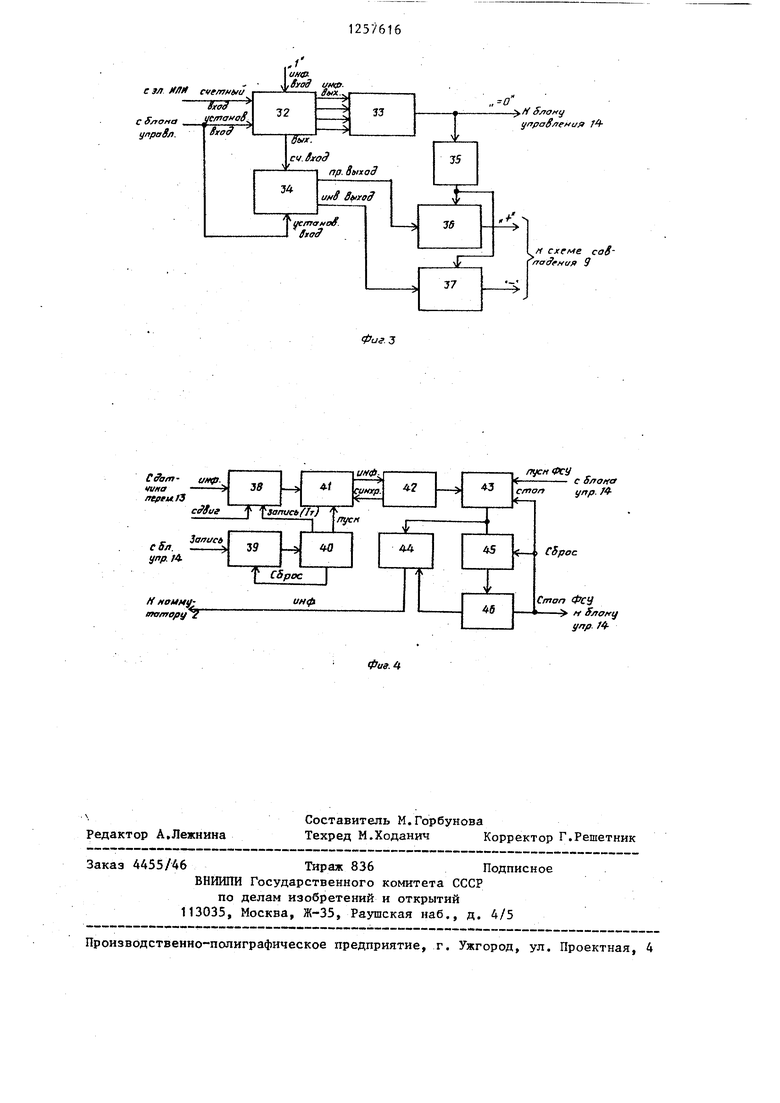
На фиг,1 представлена блок-схема предлагаемого устройства на фиг.2 - функциональная схема блока управления на фиг.3 - функциональная схема блока сравнения i на фиг.4 - функциональная схема блока записи и воспроизведения.
Устройство содержит (фиг.1) блок 1 задания перемещения, коммутатор 2, интерполятор 3, первый элемент ИЛИ 4, привод 5, исполнительный элемент (инструмент) 6, генератор 7 тактовых импульсов, лервый, третий, второй элементы И 8-10, второй и первьш блоки сравнения 11 и 12, датчик 13 перемещения исполнительного элемента, блок 14 управления и блок 15 записи и воспроизведения.
Блок 14 управления содержит (фиг.2) пульт 16 управления, пятый элемент И 17, четвертый триггер 18, третий элемент ИЛИ 19, распределитель 20 импульсов, шестой элемент И 21, второй элемент ИЛИ 22, третий триг- гер 23, седьмой элемент И 24, третий формирователь 25 импульсов, первый триггер 26, четвертый элемент И 27, второй триггер 28, счетчик 29 импульсов, второй формирователь 30 импуль- сов и первый формирователь 31 импульсов.
Блок 11 (12) сравнения содержит (фиг.З) реверсивный счетчик 32 им- пульсов, восьмой элемент И 33, пятый триггер 34, элемент НЕ 35, девятый элемент И 36 и десятый элемент И 37.
Блок 15 записи и воспроизведения содержит (фиг.4) буферный регистр 38, счетчик 39 записи, дешифратор 40, элемент 41 согласования, перфоратор 42, фотосчитыватель 43, преобразователь 44 код - код, счетчик 45 воспроизведения и дешифратор 46. I
Устройство работает следующим об- разом.
Оператор с блока 14 управления переводит систему в режим обучения. При этом коммутатор 2 подключает к входу интерполятора 3 блок 1 зад-ания пере- мещения. Затем с помощью блока 1 за- Дания перемещения задается величина перемещения исполнительного органа
162
по координатным осям. Оператор на пульте 16 управления блока 14 управления нажимает кнопку Пуск. Блок 14 управления формирует разрешающий сигнал (Пуск) на элемент И 8, и импульсы с генератора 7 тактовых импульсов поступают на интерполятор 3. Интерполятор 3 распределяет импульсы по координатным осям в соответствии с величинами перемещений, заданных с блока 1 задания перемещения. Эти импульсы через элемент ИЛИ 4 поступают на привод 5, который перемещает ис полнительный элемент 6, и одновременно регистрируются датчиком 13 перемещений и двумя сравнивающими блоками 11 и 12 сравнения. Первоначально блоки сравнения запоминают исходную точку исполнительного элемента и вырабатывают сигналы отклонения исполнительного элемента от этой точки (+ - или О). После отработки перемещения интерполятор 3 вырабатывает сигнал Стоп на блок 14 управления, который снимает разрешающий сигнал с элемента И 8, и прекращается подача тактовых импульсов с генератора 7 на интерполятор 3. Оператор нажимает на кнопку Фиксация на блоке 14 управ- |Ления, и .второй блок 12 сравнения запоминает конечную точку перемещения исполнительного элемента 6 (команда Фиксация). Затем оператор с помощью блока 1 задания перемещения отво- исполнительный элемент (инструмент) и производит контроль конечной точки траектории движения исполнительного элемента (размер де- тaJJи). Если траектория движения ошибочна, то оператор нажимает на блоке 14 управления кнопку Ошибка. Блок 14 управления выдает разрешающий сигнал на элемент И 9 (ошибка) и привод 5 по импульсам с генератора 7
через элемент И 9 и элемент ИЛИ 4 по I
сигналам отклонения (+, -) с блока 11 сравнения производит перемещение исполнительного элемента в начальную точку траектории движения инструмента. При возврате в начальную точку блок 11 сравнения формирует сигнал (0) в блок 14 управления и последний снимает разреша ющий сигнал (ошибка) с элемента И 9,и при этомпе рекрывается подача импульсов на привод 5. Затем оператор с учетом необходимой коррекции осуществляет при помощи блока 1 задания перемещения
312
повторное перемещение исполнительного элемента.
Если траектория движения исполни- тельирго элемента правильна, оператор на блоке 1А управления нажимает кнопку Правильно, и блок 14 управления формирует разрешаюш ий сигнал (Правильно), поступающий на вход элемента И 10, и по сигналам с блока 12 сравнения (+ или -) привод 5 возвращает исполнительный элемент 6 в конечную точку (зафиксированную блоком 12 сравнения). При возврате в конечную точку блок 12 сравнения вырабатывает сигнал (0), по которому блок 14 управления снимает разрешающий сигнал с элемента И 10, формирует сигнал записи информации с датчика 13 перемещений исполнительного элемента в блок 15 записи и воспроиз- ведения программ, формирует сигнал на блок 11 сравнения (Установка) для запоминания установленного положения исполнительного органа в каче - стве начальной точки новой траектории и осуществляет сброс датчика 13 перемещений в нулевое положение (сигналы управления приводом задаются в прира- щениях).
Для перевода системы в режим Программа оператор нажимает на блоке 14 управления кнопку Программа, и по команде с блока 14 управления коммутатор 2 к входу интерполятора 3 подключает блок 15 запи- си и воспроизведения программ. Затем оператор нажимает на блоке 14 управления кнопку Пуск и блок 14 управления формирует сигнал запуска на блок 15 записи и воспроизведения про- грамм (Пуск ФСУ). После подготовки информации блок 15 записи и воспроизведения программ вьщает сигнал в блок 14 управления (Стоп ФСУ), которьШ формирует разрешающий сигнал на эле- мент совпадения 8 (Пуск), и происходит управление приводом 5 по такто- импульсам генератора 7 и информации с блока 15 записи и воспроизведения программ при помощи интерполятора
3, После отработки перемещения интерполятор 3 форг-отрует сигнал (Стоп) на блок 14 управления, который снимает разрешающий сигнал с элемента 8 совпадения н формирует сигнал запуска 55 (Пуск ФСУ) блока 15 записи и воспроизведения программ для подготовки новой информации на интерполятор 3.
0 5 0 5
f 5
0
5
164
Блоки сравнения функционируют следующим образом (фиг.З).
На установочные входы реверсивного счетчика 32 постоянно подан сигнал логической единицы. При подаче сигнала с блока 14 управления Установка триггер 34 устанавливается в нулевое положение, а реверсивный счетчик 32 - в положение, при котором по всех разрядах счетчика 32 устанавливается сигнал логической единицы, и элемент И 33 формирует на выходе сигнал 0, поступающий на блок 14 управления, а элемент НЕ 35 снимает разрешающий сигнал с элементов И 36 и 37. При по- ,е на привод 5 импульсов по положительному каналу реверсивный счетчик
32импульсов переполняется первым и устанавливается в нулевое положение, переключая триггер 34. В этом случае элемент И 33 снимает сигнал 0 с блока 14 управления, элемент НЕ 35 формирует разрешающий сигнал и элемент И 36 формирует сигнал +, информирующий о положительном перемещении исполнительного элемента 6 относительно зафиксированной точки. -При возврате в исходную точку реверсивный счетчик 32 устанавливается в исходное положение (во всех разрядах счетчика сигнал логической ад(иницы) и элемент И 33 формирует сигнал 0 в блок 14 управления, а элемент НЕ 35 перекрывает выход сигналов + и - с элементов И 36 и 37. Если на привод 5 поступают импульсы по отрицательному каналу, то реверсивный счетчик 32 уменьшает свои показания. При этом триггер 34 не срабатывает, элемент И
33снимает сигнал 0, а элемент И 37 выдает сигнал -, информирующий об отрицательном перемещении исполнительного элемента 6 относительно зафиксированной точки. Емкость реверсивного счетчика 32 и myльcoв определяется величиной максимального перемещения исполнительного элемента 6.
В устройстве применено два цифровых блока сравнения. Блок 11 сравнения запоминает начальную точку траектории исполинтельного элемента б (на- чальн то точку обрабатываемой поверхности), а блок 12 сравнения - конечную. При правильной траектории движе- ния исполнительного элемента и возврате в конечную точку траектории движения блок 11 сравнения запоминает эту точку в качестве начальной для
новой траектории. Для возврата исполнительного элемента в точку, зафиксированную блоком 11 сравнения при присутствии сигнала +, импульсы на привод 5 подаются по отрицательному каналу, а при присутствии сигнала - - по положительному.
Блок 14 управления работает следу- ющиь образом (фиг.2).
При нажатии кнопки Обучение на пульте 16 управления срабатывает распределитель 20 импульсов, который выдает разрешающий сигнал на Злемент, И
17и команду на перевод коммутатора 2
в режим обучения.
При нажатии на пульте 16 управления кнопки Пуск срабатывает триггер
18под действием сигнала, поступающего с выхода элемента И 17, и через элемент ИЛИ 19 формируется разрешаю- щий сигнал Пуск на элемент И 8, который подключает генератор 7 тактовых импульсов к интерполятору 3, После отработки перемещения интерполятор 3 формирует сигнал Стоп и сбрасывает триггер 18 (запуска) в нулевое положение. Триггер 18 снимает разрешаюЦЦ-П1 сигнал с элемента И 8 через элемент ИЛИ 19.
При нажатии кнопки Фиксация на пульте 16 формируется сигнал Фиксация на блок 12 сравнения, который запоминает конечную точку траектории исполнительного элемента (конечная точка обрабатываемой поверхности).
При нажатии кнопки Ошибка на пульте 16 срабатывает триггер 23 и формируется разрешающий сигнал в элемент И 9, который по сигналам с блока 11 сравнения (+ или -) по импульсам с генератора 7 тактовых импульсов осуществляет возврат исполнительного элемента 6 в точку, зафиксированную блоком 11 сравнения. После возврата в начальную точку траектории испол- нительного элемента 6 блок 11 сравне ЛИЯ формирует сигнал 0 и сбрасыва- (ет триггер 23 в нулевое положение, который снимает разрешающий сигнал с
элемента И 9.
При нажатии на пульте 16 упраЪле- ния кнопки Правильно срабатывает триггер 26 и формируется сигнал в элемент И 27 и в элемент И 10, который по сигналам с блока 12 сравнения (+ или -) по импульсам с генератора 7 тактовых импульсов осуществляет возврат исполнительного элемента 6
5
0 5
о
о 5
5
0
в конечную точку траектории движения исполнительного элемента. После возврата исполнительного элемента (инструмента) 6 и появления сигнала 0 с выхода блока 12 сравнения импульсы с генератора 7 через элемент И 17 поступают на триггер 28, который формирует через формирователи 30 и 31 импульсов сигналы Запись в блок 15 записи и воспроизведения программ, необходимые для записи информации с датчика 13 перемещений исполнительного элемента 6. Одновременно запускается счетчик 29 импульсов, который определяет объем записываемой информации с датчика 13 перемещений. После записи всей информации счетчик 29 импульсов (тактов) сбрасывает триггер 26 и через формирователь 25 импульсов Установка формирует сигнал сброса датчика 13 перемещения в нулевое положение и сигнал Установка в блок 11 сравнения, который запоминает исходную точку в качестве начальной для новой траектории исполнительного элемента 6. I
При нажатий кнопки Программа на пульте 16 управления распределитель 20 импульсов снимает разрешающий сигнал с элементна И 17, выдает разрешающий сигнал на элементы И 21 и 24 и переводит коммутатор 2 в режим Программа.
При нажатии кнопки Пуск на пульте 16 управления через элементы И 21 и ИЛИ 22 формируется команда запуска фотосчитывателя 43 Пуск ФСУ в блок 15 записи и воспроизведения программ, который подготавливает информацию для интерполятора 3. После подготовки информации блоком 15 записи и воспроизведения программ формируется сигнал останова фотосчитывателя 43 Стоп ФСУ, который через элемент ИЛИ 19 формирует разрешающий сигнал Пуск на элемент И 8, и импульсы от генера- . тора 7 тактовых импульсов начинают поступать на интерполятор 3. После отработки перемещения интерполятор 3 формирует сигнал Стоп на элемент И 24, который через элемент ИЛИ 22 формирует сигнал Пуск ФСУ в блок 15 записи и воспроизведения программ для подготовки новой информации на интерполятор 3. Блок 15 записи и воспроизведения программ снимает сигнал Стоп ФСУ с элемента ИЛИ 19 и разрешающий сигнал Пуск с элемента И 8.
712
После подготовки информации приходит сигнал Стоп ФСЗ на элемент ИЛИ 19 и работа схемы повторяется до тех пор пока.не будет воспроизведена вся программа,
С целью упрощения связей на фиг.2 не показана схема, запрещающая прохождение сигнала Стоп ФСУ на элемент ИЛИ 19 в режиме обучения, а также схема первоначальной установки всех триггеров и счетчиков в исходное положение и схема формирования символа Конец программы для остановки устройства после отработки всей программы.
Распределитель 20 импульсов представляет собой триггер, управляемый от пульта 16 управления. В качестве формирователей 25, 30 и 31 импульсов могут быть использованы одновибрато- ры, запускающиеся положительным фронтом сигнала.
Датчик 13 перемещений представляет Собой реверсивный двоично-десятичный счетчик, выдающий информацию в прира- щениях на блок 15 записи и воспроизведения программы.
Пример конкретного вьшолнения блока 15 записи и воспроизведения программ приведен на фиг.4.
Буферный регистр 38 соединен с датчиком 13 перемещений, а выход старшего двоично-десятичного разряда - с элементом 41 согласования.
Запись информации осуществляется по сигналам Запись и Сдвиг с блока 14 управления. При поступлении первого сигнала Запись на счетчик 39 дешифратор 40 формирует сигнал Запись в буферный регистр 38 и сигнал Пуск в элемент -41 согласования. По первому сигналу Запись осуществляется запись информации с датчика 13 перемещений в буферный регистр 38, по сигналу Пуск - запись информации в двоично-десятичном разряде буферного регистра 38 на перфоленту при помощи перфоратора 42 через элемент 41 согласования с перфоратором по синхроимпульсам последнего. Затем с блока 14 управления приходит сигнал Сдвиг и осуществляется сдвиг на один двоично-десятичный разряд в буферном регистре 38. При этом в старший двоично-десятичный разряд буферного регистра 38 сдвигается следующая по старщинству информация. По второму сигналу Запись с блока 14 управле
5
0
5
о
.
0
168.
ния дешифратором 40 формируется следующая команда Пуск в элемент 41 согласования и информация набивается на перфоленту при помощи перфоратора 42. Так продолжается до тех пор, пока вся информация не набьется на перфоленту. После этого дешифратор 40 сформирует сигнал Сброс на счетчик 39 записи и счетчик установится в нулевое положение.
При воспроизведении программы на фотосчитыватель 43 с блока 14 управления поступает команда запуска фотосчитывателя Пуск ФСУ, по которой включается фотосчитыватель 43, и информация с перфоленты заносится в преобразователь 44 код - код (последовательного кода в параллельный). Одновременно счетчик воспроизведения фиксирует объем введенной информации. Преобразователь 44 код - код последовательного кода в параллельньп представляет собой одноразрядные двоично- десятичные регистры, информационные входы которых соединены с фотосчитывателем 43, а разрешающий вход записи - с деши фатором 46, который определяет номер регистра, в который заносится информация. При снятии всей информации одного кадра дешифратор 46 формирует сигнал останова фотосчитывателя 43 Стоп ФСУ на блок 14 управления, останавливает фотосчитыватель 43 и сбрасывает счетчик 45 воспроизведения .
Формула изобретения
1, Устройство для формирования управляющих программ, содержащее блок задания перемещения, подключенный выходом к первому информационному входу коммутатора, генератор тактовьк импульсов, подключенный выходом к первому входу первого элемента И, привод, датчик перемещения исполнительного элемента, блок записи и воспроизведения программ, второй элемент И, отличающееся тем, что, с целью повьЕиения быстродействия и точности устройства, в него введены первый и второй блоки сравнения, интерполятор, третий элемент И, первый элемент I-UIH и блок управления, подключенный первым, вторым и третьим выходами соответственно к входам Запись, Сдвиг и Пуск блока записи и воспроизведения программ, четвертым
и пятым выходами соответственно к первому входу второго элемента И и к второму входу первого элемента И, шестым и седьмым выходами - к первым рходам соответственно первого и второго блоков сравнения, восьмым выходом- - к первому входу третьего элемента И, а девятыми выходами - к управляющим входам коммутатора, связанного вторым информационным входом с информационным выходом блока записи и воспроизведения программ, а выходом - с информационным входом интерполятора, подключенного синхронизирующим входом к вькоду первого элемента И, стоповым выходом - к первому входу блока управления, а информационным выходом - к первому входу первого элемента ИЛИ соединенного вторым и трепульсов, подключенного выходом переполнения к входу третьего формирователя импульсов, к седьмому выходу блока управления и к нулевому входу
5 первого триггера, соединенного единичным входом с первым выходом пульта управления, подключенного вторым выходом к единичному входу третьего триггера, третьим выходом - к первым входам пятого и шестого элементов И, четвертым выходом - к шестому вькоду блока управления, а пятым выходам - к входу распределителя импульсов, связанного первым выходом с вторым
15 входом пятого элемента И и с соответ- , ствующим девятым выходом блока управления, а вторым выходом - с вторым входом DiecToro элемента И, с соответ10
ствующим девятым выходом блока управ- тьим входами с выходами соответствен- 20 ления и с первым входом седьмого эле- но третьего и второго элементов И, а мента И, подключенного выходом к первому входу второго элемента liJIH, а вторым входом - к первому входу блока управления и к нулевому входу четвер- 25 того триггера, связанного единичньм входом с выходом пятого элемента И, а выходом - с первым входом третьего элемента ИЛИ, подключенного вторым входом к второму входу блока управле- 30 ния, а выходом - к четвертому выходу блока управления, причем нулевой вход третьего триггера соединен с пятым входом блока управления, а выходом - с восьмым выходом блока управления, вертым и пятым входами - к информаци- выход первого и второго формировате- онным выходам соответственно первого лей импульсов подключены соответственно к второму и к первому выходам блока управления, выход третьего формирователя импульсов - к десятому и
выходом - с входом привода, с вторыми входами первого и второго блоков сравнения и с входом датчика перемещения исполнительного элемента, подключенного сбросовым входом к десятому выходу блока управления, а выходом - к информационному входу блока записи и воспроизведения программ, соединенного стоповым выходом с вторым входом блока управления, подключенного третьим входом к вторым входам первого и второго элементов И, а такзке к выходу генератора тактовых импульсов, а чети второго блоков сравнения, соединенных знаковыми выходами с третьими входами соответственно второго и третьего элементов И, а третьими входа- Q седьмому выходам блока управления, ми - с соответствующими установочными второй вход второго элемента ИЛИ к выходу щестого элемента И, связанного выходом с третьим выходом блока
шинами устройстваi
2. Устройство по П.1, о т л и ч а- ю щ е е. с я тем, что блок управления
. содерлшт пульт управления, четыре триггера, распределитель импульсов, три формирователя импульсов, счетчик импульсов, четыре элемента И, два элемента ИЛИ, причем первьп1 и второй входы четвертого элемента И.являются третьим и четвертым входами блока уп- равленрш, третий вход подкгпочен к выходу первого триггера, а выход- квходу второго триггера,связанного инверсным выходом с входом первого формирователя импульсов, а прямым выходом - с
.входом второго формирователя импульсов и со счетным входом счетчика имуправления, 45 3. Устройство по П.1, о т л и ч аю щ е е с я тем, что блок сравнения содержит реверсивный счетчик импуль- - сов, подключенный установочным вхо50 дом к третьему входу блока сравнения, разрядными вьпсодами - к входам восьмого элемента И, счетным входом - к второму входу блока сравнения, ляющим входом - к первому входу блока
55 сравнения и к нулевому входу пятого триггера, соединенного единичным входом с выходом переполнения реверсивного счетчика импульсов, прямым и инпульсов, подключенного выходом переполнения к входу третьего формирователя импульсов, к седьмому выходу блока управления и к нулевому входу
первого триггера, соединенного единичным входом с первым выходом пульта управления, подключенного вторым выходом к единичному входу третьего триггера, третьим выходом - к первым входам пятого и шестого элементов И, четвертым выходом - к шестому вькоду блока управления, а пятым выходам - к входу распределителя импульсов, связанного первым выходом с вторым
входом пятого элемента И и с соответ- ствующим девятым выходом блока управления, а вторым выходом - с вторым входом DiecToro элемента И, с соответ
управления, 45 3. Устройство по П.1, о т л и ч а ю щ е е с я тем, что блок сравнения содержит реверсивный счетчик импуль- - сов, подключенный установочным вхо50 дом к третьему входу блока сравнения, разрядными вьпсодами - к входам восьмого элемента И, счетным входом - к второму входу блока сравнения, ляющим входом - к первому входу блока
55 сравнения и к нулевому входу пятого триггера, соединенного единичным входом с выходом переполнения реверсивного счетчика импульсов, прямым и ин11125761612
версным выходами - с первыми входами ка сравнения, а вторыми входами - к соответственно девятого и десятого выходу элемента НЕ, связанного входом элементов И, подключенных выходами к с выходом восьмого элемента И и с ин- соотв,етствующим знаковым выходам бло- формационным выходом блока сравнения.
I 1
Фиг. 1
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматизированной подготовки программ для станков с ЧПУ | 1986 |
|
SU1354160A1 |
| Устройство числового программного управления | 1984 |
|
SU1241196A1 |
| Система программного управления | 1984 |
|
SU1200245A1 |
| Система адаптивного числового программного управления металлорежущим станком | 1980 |
|
SU954945A1 |
| Функциональный интерполятор | 1985 |
|
SU1272311A1 |
| Система числового программного управления с постоянной скоростью резания для токарно-винторезных станков | 1981 |
|
SU978102A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ ГРУППОЙ ЕДИНИЦ ТЕХНОЛОГИЧЕСКОГО ОБОРУДОВАНИЯ | 1991 |
|
RU2020537C1 |
| Система числового программного управления | 1986 |
|
SU1397879A1 |
| Цифровой линейный интерполятор | 1986 |
|
SU1310779A1 |
| Функциональный интерполятор | 1984 |
|
SU1168900A1 |
Изобретение относится к области автоматики и может быть использовано для программного управления объектами, в частности Для управления станками с ЧПУ и роботами-манипуляторами. Цель изобретения - повьппение быстродействия устройства. Устройство содержит блок задания перемещения, коммутатор, интерполятор, элемент ИЛИ, привод, генератор тактовых импульсов, первый, второй и третий элементы И, первый и второй блоки сравнения, датчик перемещения исполнительного элемента, блок управления, блок Записи и воспроизведения. Введение первого и второго блоков сравнения, блока управления, элемента ИЛИ и элемента И позволяет автоматически исключить из программы все ошибочные и непроизводительные действия оператора и тем самым повысить точность формирования программ и сократить время разработки управляющих программ. 2 з.п. ф-лы, 4 ил.: и с (Л с ел -ч О)
Синтгр- no/ntfftopcf
J
стоп
С первого цифр. сраВн. yc-Sa ft
инв. Baix.
стоп
Фса
CS/ioifa зол. и Stxnp. ffl.JS
У N, fa 3Jr. coSna efu S
ajUHCCfftffUX f f f
р - Л Лда/яж (ftf.c/.y. i програнаа н памму/пагтгору2
пуснФС / гf
-Г. OffOfty зап. и oocnfl.
/тр. /5
8 сгену соВпаЗеная 9 ° S Затчик лер. /3 SnepS. tfotp. сравн. ij-fo ft
8 Лт(7/г зап. и 8ас пр. ffff./S
езл MM cvemfi a
ЙжоЗ
ijcmaHoS, lJnpaSл.
f{ S/rOMtj yrfpaS/ eHU /4n caS -гашения 9
Редактор А.Лежнина
Составитель М.Горбунова
Техред М.Ходанич Корректор Г.Решетник
Заказ 4455/А6Тираж 836Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Патент США № 3306471, кл | |||
| Устройство для вытяжки и скручивания ровницы | 1923 |
|
SU214A1 |
| Прибор для заливки свинцом стыковых рельсовых зазоров | 1925 |
|
SU1964A1 |
| Устройство для программного управления | 1972 |
|
SU541147A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
