сумматор, ключ, блок усилителей, блок реверса, а пьезЬкерамический преобразователь выполнен с двумя степенями свобоДМ в Ш1йе пьёа 6кёраййчёек%гЬ Стер ня,. на котором расмещены электродь, соединенные с выходами блока реверса, первый вход которого через ключ подключен ко второму выходу блока воспроиздедения характеристик динамической ис-згемы, соединённому с первым входом амплитудного модулятора, выход котороо подключен к первому входу сумматора, выход которого соединен со вторым ходом блока реверса, второй вход кото-рогр подключен к блока усилителей, соединенному со вторым входом блока воспроизведения характеристик данамической системы, входы блока усилителей подключены к датчикам параметров, динамическая модель установлена на валу, на котором укреплен дополительно введенный диск, сопряженный С льезокерамическим стержнем.
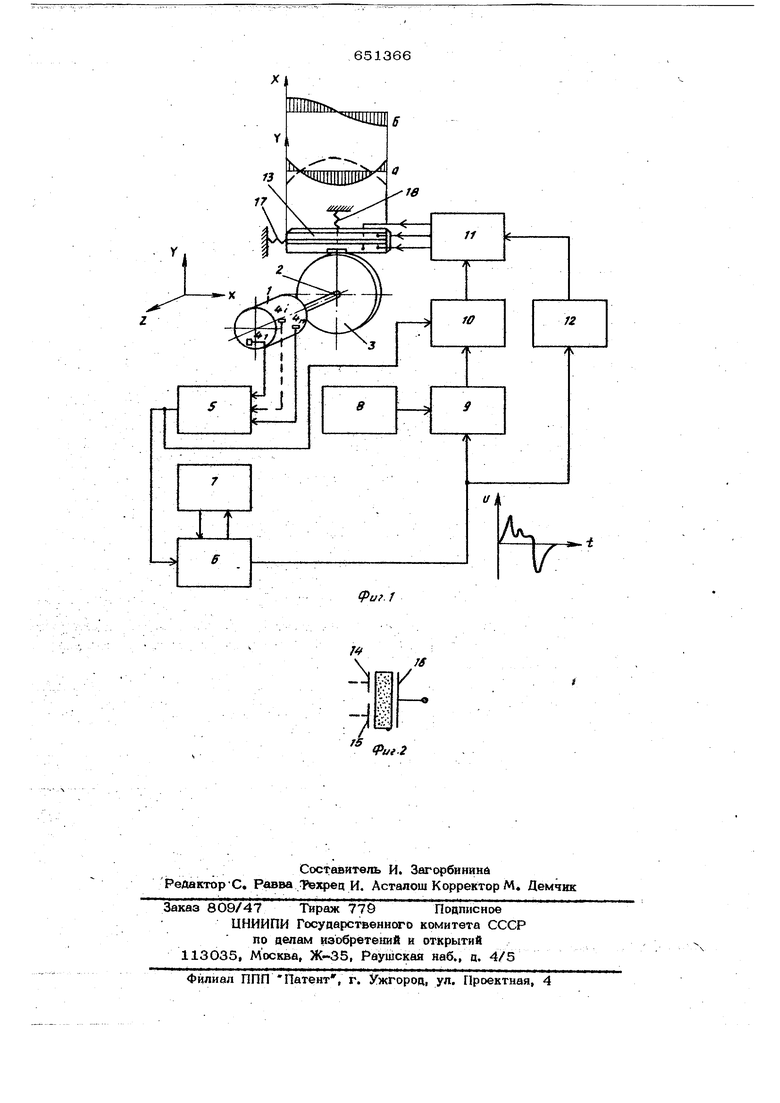
Изофетвние поясняется чертежами. На фиг. 1 представлена блок-схема устройства; на фиг. 2 -.схема расположения электродов пьезоэлектрического преобраЗовйгеЛя. . ;;
Устройство состоит из динамической модели 1 с валом 2, на котором жестКО закреплен диск 3, датчиков параметPCJB объекта 4. ... 4f, выходы которых через блок усилителей 5 подключены 1C входам блока воспроизведения характеристик Динамической системы О, взаимно связанного с блоком оптимизации 7, З екёра ораколебанкй 8, амплитудного мойулатора 9, к первому входу которо1 6 Йба1Й 1Йчён вЬ1ход reHepaTopia колебаний 8 и Кб второму входу выход блока. СЗ ММйТора ГО, через который выход ампянтудного модулятора 9 соединен с первым входом блока реверса 11, а «: другому входу сумматора 10 подключен выход блока усилителей 5, кйК5ча 12, через который выход блока 6 соединен с вторым входом блока реверса 11, пье оэлект рического преоб раэсва тел я
13,ейгголненноговвиде пьезокерамичесКогосте эжня, с разделенными электродам к
14,15 (фиг. 2) по длине с одной сторонь И нераздеяё.нньтм электродом 16
с другой. Электроды 14, 15 и 1.6 приСОбдйнены к соответствующим выходам блока реверса 11. Частота генератора колебаний 8 равна резонансной частоте изгибных и продольных колебаний стерж.ня преобразователя 13. При помощи пружин 17 и 18 стержень преобразовптеля 13 упруго прижат к диску 3.
.Устройство работает следующим образом.
Вал 2 совершает вращательное движение с крутильными колебаниями. Динамическая модель 1 представляет часть динамической системы, которую трудно описать математически. Динамические
связи модели 1 с валом 2, которые
легко поддаются формализации, описываются дифференциальными уравнениями. Если колебания в { -ой связи мбдели с валом 2 описьгааются дифференциальным
уравнением:
Oilp-f-htp-i-klf М, (1)
гдеС{,ф,ф - координаты угловых ускорений скорости и амплитуды колебаНИИ соответственно в i -ой связи;
tJ - момент инерцииэлементов связи;.
kjh - коэффициенты жесткости и демпфирования соответственно;
М - результируюидий момент инерции передаваемый на зал «ой связью, то решение уравнения (1) происходит в блоке 6 по .сигналам, поступающим в неГо через блок усилителей 5 с дат.чиков 4|. .... 4 .... .41-;,пропорцирнальным состояниям элементов i -ой связи, т. е.ф,ф fcp . Решение в блтее 6 уравнения (1) происходит по общеизвестным принципам. При этомна выходе блока 6 появляется аналоговый сигнал, равный результирующему моменту, действующему i -ой связи на вал 2. По ;сигналу блска 6 с пьезоэлектрического преобразоват(гля 13 этот момент тбчнб передается на вал2. Точная передача момента на вал 2 по сигналу с блока 6 осуществляется слепуюшим образом.
Сигнал с блока, 6 модулируется амплитудным модулятором 9 высокой частотой генератора колебаний 8 и поступает в сумматор 10. В зависимости от скорости вращения вала 2 модели 3, (информация об угловой скорости вращения поступает от выхода блока усилителей 5 на второй вход сумматора) устанавлйваетсй абсолютная величина мо дулированного напряжения с выхода блока 6, которое дальше поступает через блок реверса 11 на электроаы 14 и 16 преобразователя 13. В преобразователе 13 возбуждаются предельные иэгибные колебания. Но суще- ствует определенная разность их колебаний (около 90 ), которая ,обе печ)гоается неодинаковостью частот резонансиых продольных и нагибных колебаний стержня преобразователя 13, В результате в зоне контакта стержня с диском 2 происходят высокочастотные косые соударения, приводящие к появлению тангенциальных импульсов, приводящих к созданию окружной силы на диске 2. Этот момент соответствует форме сигнала с выхода блока б, так , как беличит а момента в определенной зоне линейно зависит от амппитупы колебаний и тем самым, от напряжения. При перемене знака сигнала с выхода блока 6 на обратный блок реверса 11 присоеци шт напряжение к электродам 15 и 16, произойдет перемена знака остающегося момента пропорционально сигналу с выхода блока б (при реверсировании меняется фаза изгибных колебаний относительно продольных на 180°). Так как частота сигнала на выходе генератора 8 сотни кГц, то в больших пределах угловой скорости вращения вала 2 момент; пере даваемый пьезоэлек трическим преобразователем на вал 2, не зависит от этой скорости и осуществляется большая точность передаваемого момента по сигналу с выхода бло ка 6. Изменение параметров 3)К)Ь в блок 6 по уравнению (1) можно провести оп тимизацию моделируемой части системы вручную или с помощью блока ontHMH3aции 7 автоматически. Наличие безынерционного пьезоэлектрического преобразователя, точно передающего крутящий момент валу объек та по сигналу из блока моделировавдя, позволяет и введение дополнительных блоков и связей в устройстве в широко частотном диапазоне проводить моделирование прецизионных ротационно-колебательных систем. 66 формула изобретения Устройство для моделирования нел.инейных колебательных систем, соцержащее динамическую модель, датчики параметров, установленнь1е на модели, блок воспроизведения характеристик динамической системы, первый вход и выход которого подключены к выходу и входу соответственно блока оптимизации, , генератор колебаний, выход которого соединен с первым входом первого амплитудного модулятора, и пьезоэлектрический Преобразователь, отличающееся тем, что, с целью, расщирения функциональнь1Х возможностей в него введены сумматор, ключ, блок усилителей, блок реверса, а пьезокерамический преобразователь выполнен с двумя степенями в виде пьезокерамическогр стержня, на котором размещены электроды, соединённые с выходами блока реверса, первый вход которого через ключ подключен ко второму выходу блока воспроизведения характеристик динамической системы, соединенному с первым входом амплитудного модулятора, выход которого подключен к первому входу сумматора, выход которого соединен со вторым входом блока реверса, второй вход которого подключен к выходу блока усилителей, соединенному со вторым входом блока воспроизведения характеpactHK динамической, системы, входы блока усилителей подключены к датчикам параметров, динамическая модель установлена на валу, на котором укреплен дополнительно введенный диск, сопряженный с пьезокерамическим стержнем. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 516О57, кл. q 06 q 7/48, 1975. 2.Авторское свидетельство СССР №.516056, кл, q Об q 7/48/ 1978.
ШШШт..
чщщ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования нелинейных колебательных систем | 1975 |
|
SU516056A1 |
| Устройство для полунатурного моделированияМЕХАНичЕСКиХ КОлЕбАТЕльНыХ СиСТЕМ | 1979 |
|
SU840963A1 |
| Устройство для управления позиционирующим механизмом | 1986 |
|
SU1313650A1 |
| СИСТЕМА СТЕРЕОТЕЛЕВИДЕНИЯ | 2003 |
|
RU2246799C1 |
| Устройство для моделирования виброударных механических систем | 1977 |
|
SU714420A1 |
| Балансировочный станок | 1977 |
|
SU729456A2 |
| ЦИФРОВАЯ СИСТЕМА СТЕРЕОТЕЛЕВИДЕНИЯ | 2003 |
|
RU2246801C1 |
| Устройство для моделированияСиНХРОННОгО гЕНЕРАТОРА | 1979 |
|
SU805360A1 |
| Устройство для моделирования синхронного генератора | 1982 |
|
SU1068952A2 |
| Устройство для моделирования ротор-НыХ СиСТЕМ | 1979 |
|
SU822221A1 |
13
..N
(ptif. 1
«.;
