1
Изобретение относится к области электрического моделирования.
Известны устройства для моделирования нелинейных колебательных систем, содержаидие исследуемый объект, установленный на возбудителе колебаний, датчики иараметров, расположенные на исследуемом объекте и подключенные к соответствующим входам блока моделирования динамической системы и блока оптимизации, выход которого соединен с соответствующим входом блока моделирования динамической системы, первым выходом связанного с соответствующим входом блока.
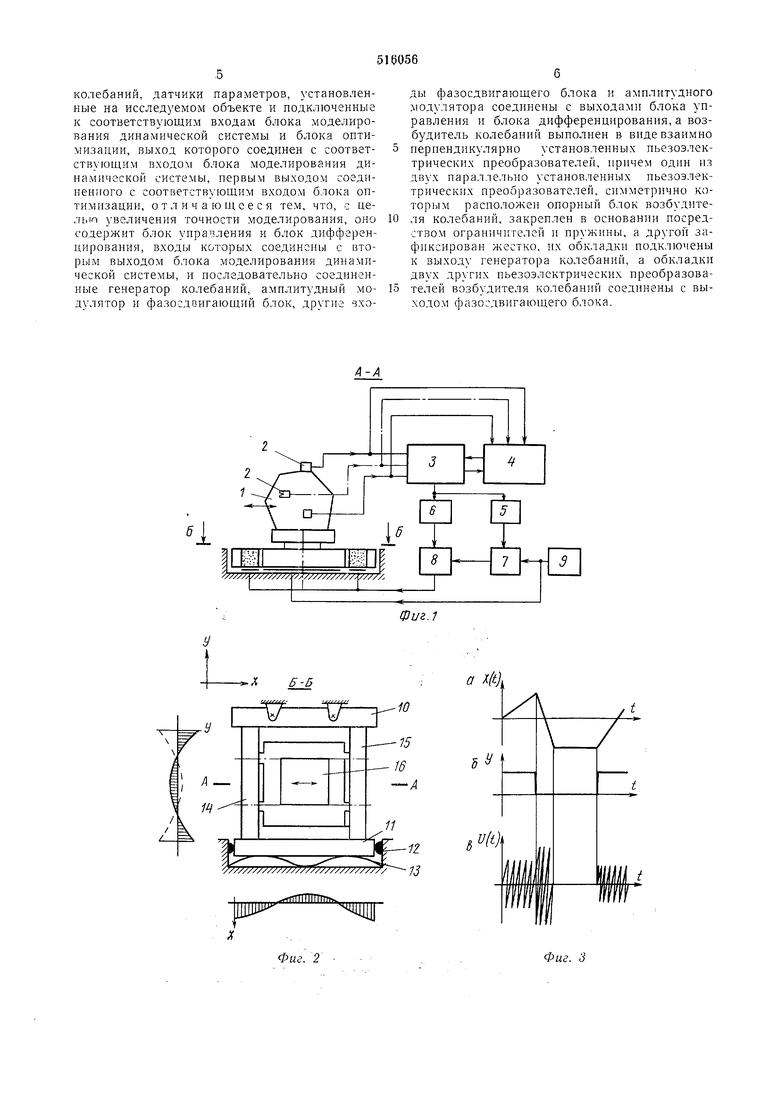
Предложенное устройство отличается тем, что, с цельЕО повышения точности моделироваиия, в него введены блок управления и блок дифференцирования, входы которых соединены с вторым выходом блока моделирования динамической системы, и последовательно соединенные генератор колебаний, амплитудный модулятор и фазосдвигающий блок. Другие входы фазосдвигающего блока и амплитудного модулятора связаны с выходами блока управления и блока дифференцирования, а возбудитель колебаний выполнен в виде взаимно перпендикулярно установленных пьезоэлектрических преобразователей. Одпн из двух параллельрю установленных пьезоэлектрических преобразователей, симметрично которым расположен опорнып олок возоудителя колебаний, закреплен в основании с помощью ограничптглей и пружины, а другой зафиксирован жестко. Их обкладки подключепы к выходу генератора колебаний, а обкладки двух других пьезоэлектрических преобразователей возбудителя колсбаппй соедпнепы с выходом 4 язосдвигающего блока. На фиг. 1 и 2 показано предлагаемое устройство с блок-схемой, разрезы но А-А и Б-Б; на фиг. 3, а, б, в приведены зависимости электрических парахметров устройства (фазы и амплитуды) от требуемого закона движения исследуемого объекта.
К исследуемому объекту 1 прикреплен ряд датчиков 2, регистрирующих параметры (перемещение, скорость, ускореппе и т. д.). Датчики подключены к входу блока 3 моделирования динамической системы, а к
блоку 4 оптимизации, выход блока моделироваппя дииамичсской системы - к блокам дифференцирования 5 и управления 6. Выход блока дифферепцирования присоединен к амплитудному модулятору 7, а выход блока
6 - к фазосдвигаюп:,ему устройству 8, которые управляют амплитудой и фазой высокочастотпэго нанряжепия, задаваемого геператором 9 электрических колебаний фиксированной частоты. Генератор 9 подключеп к возбудителю колебаний, а и.менно к обкладкам пье
зоэлектрических преобразователей 10 и 11, выполненных в виде пьезокерамических брусков. Один из них (10) закреплен в узлах колебаний жестко, другой (11) с помощью ограничителей 12 и пружины 13 прижимает два других аналогичных преобразователя 14 п 15 к преобразователю 10. В узлах колебании преобразователей 14 и 15 прикреплеп опорный блок возбудителя колебаний, к которому крепится исследуемый объект. Опорный блок может перемещаться только в иаправлении оси X. Обкладки иреобразователей 14 и 15 ирисоедииены к генератору 9 через амплитудный модулятор и фазосдвигаюи-1,ее устройство. Резонансные частоты всех четырех преобразователей равны ввиду равенста геометрических размеров, материала и характера крепления. Обкладки (электроды) преобразователей 10, 11, 14 и 15 выполнены таким образом, что при резоиапсе в них образуется полная стоячая волна (с двумя узлами колебаний). Характер продольных колебаний преобразователей приведен на фиг. 2.
Устройство работает следуюидим образом.
Исследуемый объект, представляюш,ий неизвестную часть системы, совершает колебания, задаваемые опорным блоком 16 возбудителя колебаний. Датчики 2 фиксирует параметры исследуемого объекта в разных местах. Сигналы, пропорциональные параметрам исследуемого объекта, с выхода датчиков поступает в блок 3 моделирования динамической системы, а также в блок 4 оптимизации. Блок 4, соответствеино связанный с блоком 3, позволяет известными методами оптимизировать параметры или структуру известной части динамической системы и определяет моментную координату положения исследуемого объекта (опорного блока возбудителя колебаний). Таким образом, сигнал, пропорциональный упомянутой моментной координате положения исследуемого объекта, с выхода блока 3 поступает в блок 5 дифференцирования и блок 6 управления (сигнал фиг. 3, а). Выходной сигнал блока 5, иропорциональный скорости изменения моментной координаты положения исследуемого объекта (огибающая фиг. 3, в), и блока 6, фиксирующий фазу изменения моментной координаты (фиг. 3,6), подключеиы к входам блока 7 амплитудного модулятора и блока 8 фазосдвигающего устройства соответственно. Генератор 9 вырабатывает высокочастотные электрические сигналы. Они поступают прямо к обкладкам пьезоэлектрических преобразователей 10 и И возбудителя колебаний. Тот же высокочастотный сигнал с выхода генератора 9 подается в амплитудный модулятор, который модулируется сигпалом с выхода блока 5 (огибающая фиг. 3, в), пропорциональным производной сигнала с выхода блока 3 (фиг. 3, а. Сигнал с выхода модулятора проходит в фазосдвигающее устройство, которое меняет фазу модулированного высокочастотного сигнала на 180° в тот момент, когда блок 6 управления фиксирует
изменение направления, т. е. нарастание и убывание, выходного сигнала блока 3 (фиг 3, а, б). Такой модулированный сигнал двух иоляриостей, иосящий информацию также и о направлении изменения выходного сигнала блока 3, поступает к обкладка.м преобразователей 14 и 15.
При подаче высокочастотных электрически.ч колебаний к обкладкам преобразователей,
они начинают соверщать резонансные колебания. В местах контакта иреобразователей происходят косые удары, направленные в сторону, зависящую от соотнощения фаз колебаний. Фазы колебаний преобразователей 10 и
11 совиадают, фазы колебаний преобразователей 14 п 15 отличаются на 180°. При соблюдеиии этих требований, косые удары во всех четырех контактах преобразователей оказываются паправленными в одну сторону,
т. е. в ту же сторону перемещаются преобразователи 14 и 15 и к ним прикрепленный опорный блок 16. Реверсирование движения происходит при изменении фаз колебаний нреобразователей 14 п 15 на 180° (пунктирная
кривая иа фиг. 2), что обеспечивается фазосдвигающи.м устройством 8. Генератор 9 настроен на резонансную частоту преобразователен. Скорость перемещения в широком диапазоне линейно зависим от амплитуды высокочастотиого сигнала. Частота обычпо лежит в диапазоне от 20 кг до 1000 кгц, т. е. косые удары следуют с большой частотой, и практически происходит равномерное движение, так как такие частоты фильтруются самой ме.хаиической системой иривода. Таким образом, реверсировапие столика осуществляется при фиксировании фазосдвигаюпхим устройством момента изменения направления сигнала с выхода блока 3, а скорость его иеремещеПИЯ - от амплитуды модулированного высокочастотного сигнала, которая пропорциональна произво люй выходного сигнала блока 3, т. с. самой скорости изменения сигнала с выхода блока 3. Этим доказано движение
опорного блока возбудителя колебаний по закону, совпадающему с формой выходного блока моделирования динамической системы. Высокая точпос1Ъ совпадения достигается тем, что частота генератора 9 очень бо:1ЬИ1ая и
достигает иескол1зких Meiarepn.
Высокая точность имитаций движений, задаваемым выходным сигналом блока 3 опорному блоку 16. позволяет исследовать сложные динамические систелты. При этом обеспечивается точност псрепесгния информации, зафиксированной в вычислите.:1ьпых устройствах, к рсальиому объекту. Информация фиксируется в форме сигнала.
Формула изобретения
Устройство для моделирования нелинейных
колебательных систем, содержащие исследу65 емый объект, установленный на возбудителе
колебаний, датчики параметров, установленные на исследуемом объекте и подключенные к соответствующим входам блока моделирования динамической системы и блока оптимизации, выход которого соединен с соответствующим входом блока моделирования динамической системы, первым выходом соединенного с соответствующим входом блока оптимизации, отличающееся тем, что, с целью увеличения точности моделирования, оно содержит блок управления и блок дифференцирования, входы которых соединены с вторым выходом блока моделирования динамической системы, и последовательно соединенНЕзге генератор колебаний, амплитудный модулятор и фазосдвигающий блок, другие входы фазосдвигающего блока и амплитудного модулятора соединены с выходами блока управления и блока дифференцирования, а возбудитель колебаний выполнен в виде взаимно перпендикулярно установленных пьезоэлектрических преобразователей, причем один из двух параллельно установленных пьезоэлектрических преобразователей, симметрично которым расположен опорный блок возбудителя колебаний, закреплен в основании посредством ограничителей и пружины, а другой зафиксирован жестко, их обкладки подключены к выходу генератора колебаний, а обкладки двух других пьезоэлектрических преобразователей возбудителя колебаний соединены с выходом фазосдвигающего блока.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования нелинейных колебательных систем | 1977 |
|
SU651366A1 |
| Устройство для моделирования вибродвигателя | 1980 |
|
SU894742A1 |
| Устройство для моделирования нелинейных колебательных систем | 1976 |
|
SU610134A1 |
| Устройство для моделирования ротор-НыХ СиСТЕМ | 1979 |
|
SU822221A1 |
| Измерительная головка | 1979 |
|
SU1095065A2 |
| Электродинамический вибратор | 1977 |
|
SU659199A1 |
| Устройство для полунатурного моделированияМЕХАНичЕСКиХ КОлЕбАТЕльНыХ СиСТЕМ | 1979 |
|
SU840963A1 |
| Устройство для моделирования нелинейных колебательных систем | 1975 |
|
SU516057A1 |
| Устройство для полунатурного моделирования | 1976 |
|
SU734734A1 |
| Лазерный интерферометр | 2016 |
|
RU2645005C1 |
1
