Изобретение относится к приборостроению и может быть использовано для управления высокопрочными ционирующими механизмами с пьезоэлектрическими вибродвигателями.
Целью изобретения является повышение точности и быстродействия за счет того, что исключается возбуждение резонансных колебаний узлов устройства, а также исключается проскальзывание при пуске и останове вибродвигателя.
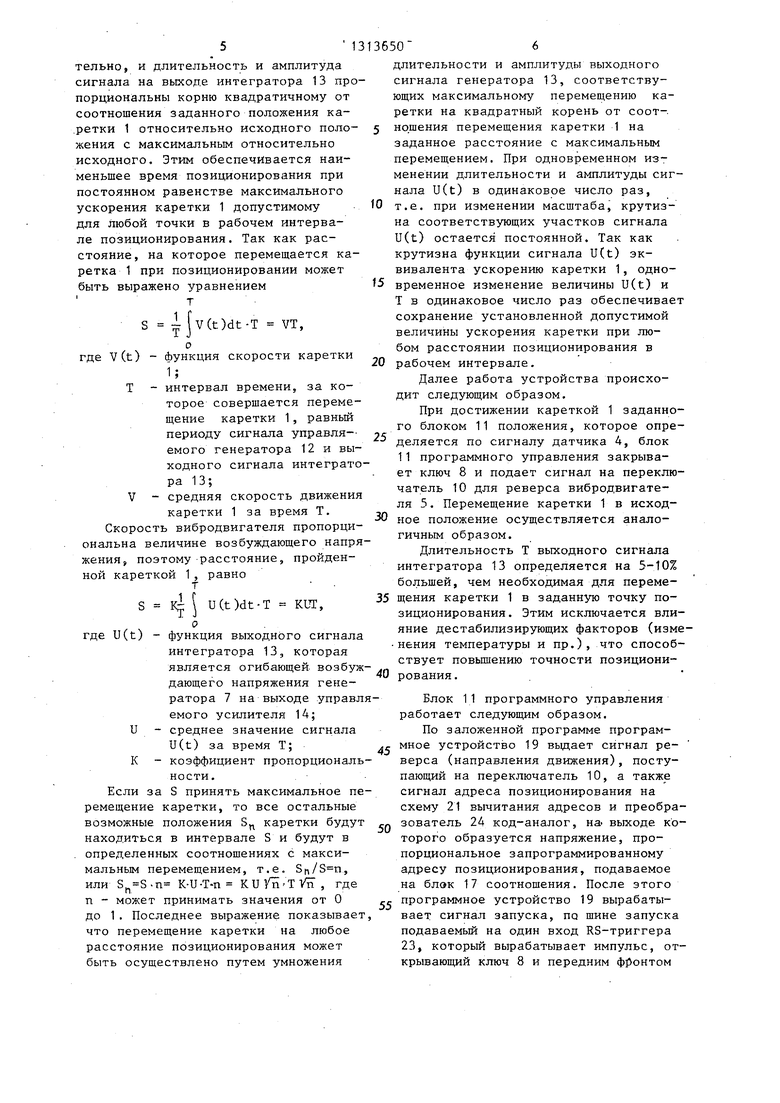
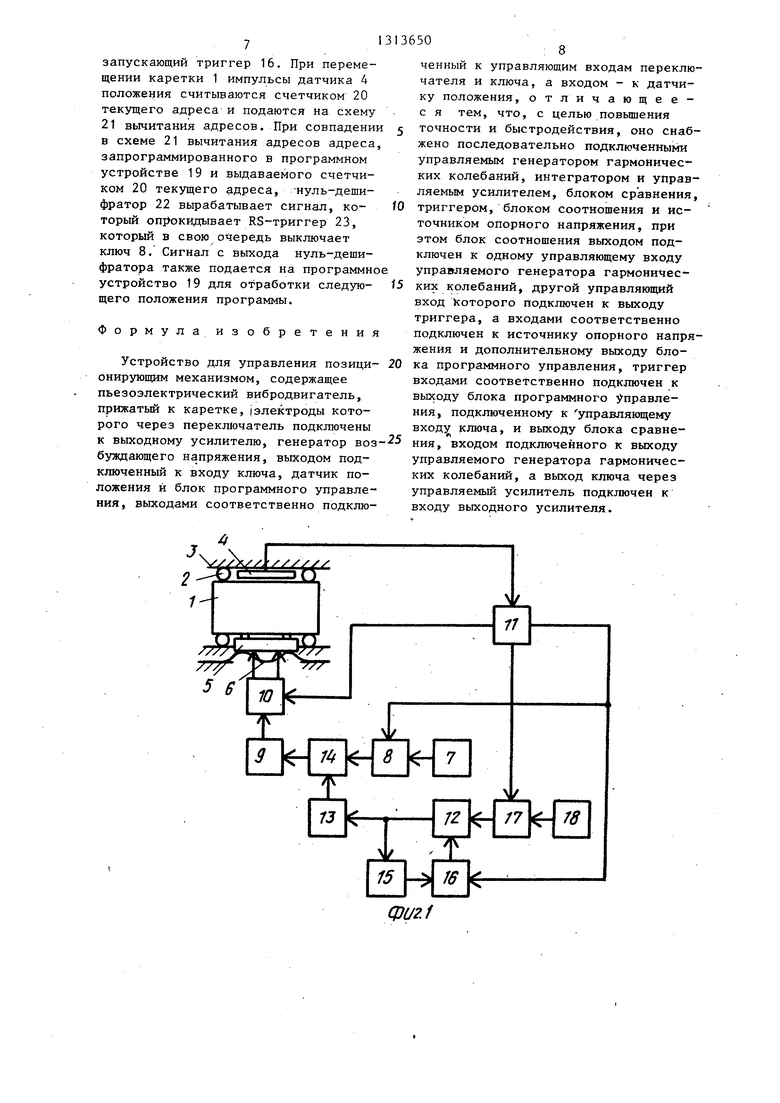
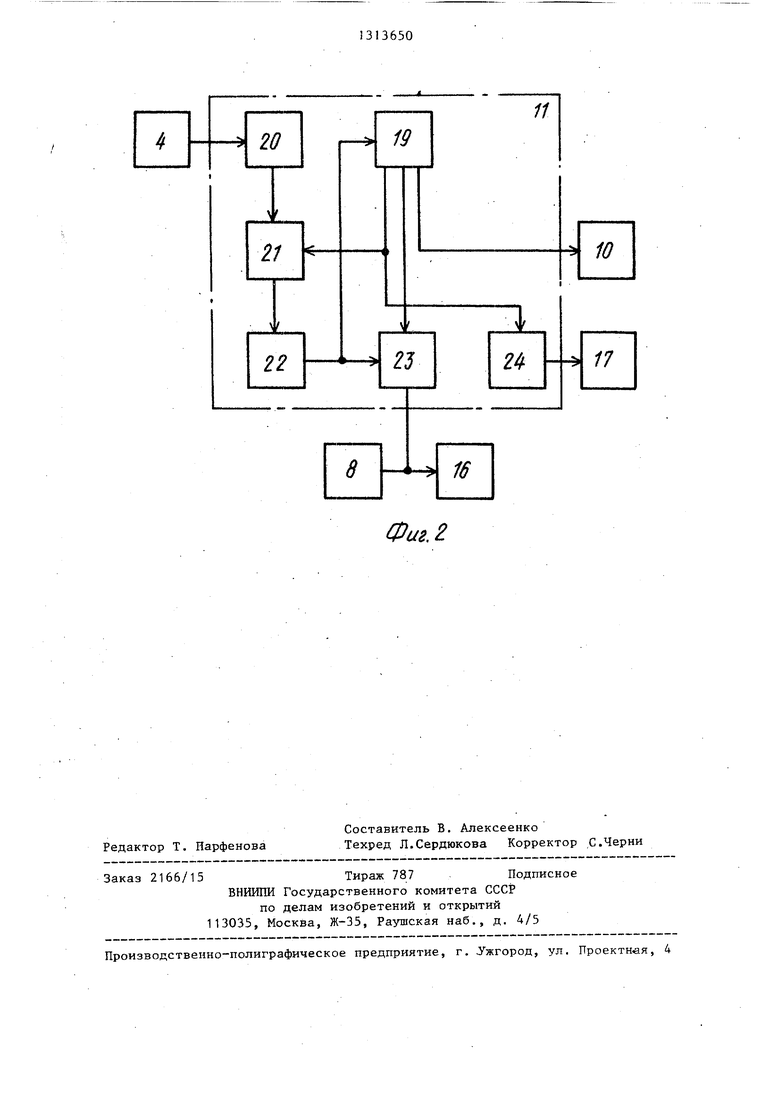
На фиг. 1 приведена функциональная схема предлагаемого устройства для управления позиционирующим ме- ханизмом; на фиг. 2 - схема блока программного управления.
Устройство содержит каретку 1, посредством подшипников 2, установленную -между направляюш,ими 3, датчик 4 положения, вибродвигат ель 5, размещенный на направляющей 3 и прижатый пружиной 6 к каретке 1, генератор 7 возбуждающего напряжения,
ключ 8, выходной усилитель 9, переключатель 10 и блок 11 программного управления. Генератор 7 возбуждающего напряжения подключен к входу ключа 8, выходной усилитель 9 через переключатель 10 подключен к двум парам электродов вибродвигателя 5, блок 11 программного управления двумя выходами подключен соответственно к управляющим входам ключа 8 и переключателя 10, и входом - к датчику 4 положения . Устройство снабжено последовательно подключенными управляемым генратором 12 гармонических колебаний, интегратором 13 и управляемым усили- Tejем 14, блоком 15 сравнения, триг- гером 16,блоком 17 соотношения и источником 18 опорного напряжения. При этом блок 17 соотношения выходом подключен к одному управляющему входу управляемого генератора 12 гармонических колебаний. Другой управляющий вход управляемого генератора 12 подключен к выходу триггера 16. Входами блок 17 соотношения подключен к источнику 1В опорного напряжения и дополнительному выходу блока 11 программного управления. Триггер 16 одним входом подключен к выходу блока 11 программного управления, подключенному к управляющему входу ключа 8, другим входом - к выходу блока 15 сравнения, который входом подключен к выходу управляемого генера
5
0
5
тора 12 гармонических колебаний. Выход ключа 8 через управляемый усилитель 14 подключен к входу выходного усилителя 9.
Блок 11 программного управления содержит программное устройство 19 (например. ЭВМ), счетчик 20 текущего адреса, схему 21 вычитания адресов, нуль-дешифратор 22, RS-триггер 23 и преобразователь 24 код-аналог, при этом шина реверса программного устройства 19 подключена к переклю- . чателю 10, шина запуска - к одному входу RS-триггера 23, сигнальная шина - к входу преобразователя 24 код-аналог, выходом подключенного к блоку 17 соотношения, и к одному входу схемы 21 вычитания адресов, второй вход которой подключен к выходу счетчика 20 текущего адреса, входом подключенного к датчику 4 перемещения, а выход через нуль-дешифратор 22 - к второму входу RS-триггера 23, выходом подключенного к входам ключа 8 и триггера 16. Датчик 4 положения может быть выполнен в виде фотоэлектрического растрового преобразователя.
Устройство работает следующим образом. I
При включении устройства блоком
11 программного управления, осуществляющего операции программирования положения позиционирования с вырабатыванием электрического сигнала, пропорционального расстоянию заданной точки позиционирования относительно исходного положения, сравнения сигнала запрограммированного положения с , сигналом датчика положения и выдачу сигнала на закрытие ключа при их равенстве, выдачу сигнала открытия ключа и сигнала реверса вибродвига- . теля,) вырабатывается импульс запуска, который открывает ключ 8 и передним фронтом этот импульс запускает триггер 16. Последний запускает управляемый генератор 12 гармонических колебаний, который отрабатывает один период синусоидального сигнала. По окончании одного периода колебаний блок 15 сравнения вырабатывает сигнал, закрывающий триггер 16, а по0
5
0
0
следний закрывает управляемый генератор 12 гармонических колебаний. Таким образом, управляемым генератором 12 гармонических колебаний формируется сигнал в виде отрезка сину3
соидальной функции длительностью в один период. Сформированный генератром 12 сигнал подается на интеграто 13, На выходе иргтегратора образуется сигнал, который возрастает по синусоидальному закону от нуля в начале сигнала управляемого генератор 12 до максимума посередине и убывае до нуля к концу сигнала управляемог генератора 12.
Этот сигнал подается на управляющий вход управляемого усилителя 14 который изменяет напряжение возбуждающего генератора 7 по закону сфор мированного в интеграторе 13 сигнал С выхода управляемого усилителя 14 сформированное напряжение генератор 7 через выходной усилитель 9 и переключатель 10 подается на вибродвигатель 5. Последний может быть выпол- йен, например, в виде пьезоэлектричекой пластины с четырьмя электродами образованными линиями, проходящими посередине пьезоэлектрической пластины вдоль и поперек с одной ее сто- РОНЫ, и одним общим электродом с другой. Электроды, расположенные с одной стороны пьезоэлектрической пластины, соединены крестообразно попарно и подключены к соответствую- щим выходам переключателя 10. Вибродвигатель 5, питаемьй сигналом генератора 7 возбуждающего напряжения, сформированным в управляемом усили
При работе устройства длительн сигнала управляемого генератора 1 гармонических колебаний регулируе блоком 17 соотношения, на один вх которого подается напряжение от бл ка 11 программного управления вели чиной, пропорциональной расстоянию от исходного положения каретки 1 д требуемой точки позиционирования, на другой вход - напряжение источн 18 опорного напряжения. Величина опорного напряжения оцределяется р ной величине напряжения блока 11 п граммного управления, подаваемого блок 17 соотношения при положении каретки 1, соответствующем максима ному .ее перемещению относительно исходного положения. На выходе бло 17 соотношения получается сигнал, пропорциональный соотношению напря жения соответствующей точки позици онирования каретки 1 относительно исходного Положения к напряжению, соответствующему .максимально удале ному положению каретки 1 относител но исходного положения. Этим сигна лом управляется величина электриче кой емкости (или индуктивности), включенной в резонансный контур уп равляемого генератора 12 гармониче ких колебаний с Емкость может изменяться, например, путем подачи выходного сигнала (напряжения) блока 17 соотношения на варикап с линеар
теле 14, передвигает каретку 1 вдоль 35 зующими цепями, чем обеспечивается 3
направляющих 3 со скоростью, которая изменяется по синусоидальному закону от нуля в начале дистанции позиционирования до максимальной посередине и до нуля в конце дистанции 40 позиционирования. Этим обеспе ивает- ся исключение вредных моментов и проскальзывания при движении каретки 1. Для заданной дистанции позиционипропорциональная.зависимость между выходным напряжением блока 17 соот ношения и емкостью резонансного ко тура управляемого генератора 12. П риод колебаний генератора с параме рами контура связан зависимостью Т 2TT/L-C , где L - индуктивность, С - емкость контура. Поэтому длител ность (период) сигнала управляемого
рования, например максимально возмож-45 генератора 12 находится в пропорцинои, путем регулирования длительности (периода) сигнала управляемого ге- нерат ора 12 гармонических колебаний
и коэффициента усиления выходного усилителя 9 достигаются такие величи-5о на и длительность сформированного в управляемом усилителе 14 возбуждающего напряжения,.при которых вибродвигателем отрабатывается заданная дистанция при ускорении каретки 1, 55 не превьш ающем допустимого значения, которое ограничивается величиной фрикционной силы между кареткой 1 и вибродвигателем 5 .
При работе устройства длительност сигнала управляемого генератора 12 гармонических колебаний регулируется блоком 17 соотношения, на один вход которого подается напряжение от блока 11 программного управления величиной, пропорциональной расстоянию от исходного положения каретки 1 до требуемой точки позиционирования, а на другой вход - напряжение источник 18 опорного напряжения. Величина опорного напряжения оцределяется равной величине напряжения блока 11 программного управления, подаваемого на блок 17 соотношения при положении каретки 1, соответствующем максимальному .ее перемещению относительно исходного положения. На выходе блока 17 соотношения получается сигнал, пропорциональный соотношению напряжения соответствующей точки позици- онирования каретки 1 относительно исходного Положения к напряжению, соответствующему .максимально удаленному положению каретки 1 относительно исходного положения. Этим сигналом управляется величина электрической емкости (или индуктивности), включенной в резонансный контур управляемого генератора 12 гармонических колебаний с Емкость может изменяться, например, путем подачи выходного сигнала (напряжения) блока 17 соотношения на варикап с линеаризующими цепями, чем обеспечивается
зующими цепями, чем обеспечивается
пропорциональная.зависимость между выходным напряжением блока 17 соотношения и емкостью резонансного контура управляемого генератора 12. Период колебаний генератора с параметрами контура связан зависимостью Т 2TT/L-C , где L - индуктивность, С - емкость контура. Поэтому длитель ность (период) сигнала управляемого
ональкои зависимости с квадратичным корнем от выходного напряжения блока 17 соотношения.
Поступая на интегратор 13, который имеет спад амплитудно-частотной характеристики - 20 дБ на декаду, изменяющийся по длительности (периоду), сигнал управляемого генератора 12 вызывает соответствующее изменение сигнала на выходе интегратора 13 по длительности и изменение этого сигнала по величине пропорционально его . изменению по длительности. Следовательно, и длительность и амплитуда сигнала на выходе интегратора 13 пропорциональны корню квадратичному от соотношения заданного положения ка- .ретки 1 относительно исходного положения с максимальным относительно исходного. Этим обеспечивается наименьшее время позиционирования при постоянном равенстве максимального ускорения каретки 1 допустимому для любой точки в рабочем интервале позиционирования. Так как расстояние, на которое перемещается каретка 1 при позиционировании может быть выражено уравнением Т
S (v(t)dt-T VT,
-L /
где V(t) - функция скорости каретки
1;
Т - интервал времени, за которое совершается перемещение каретки 1, равный периоду сигнала управля-- емого генератора 12 и выходного сигнала интегратора 13; V - средняя скорость движения
каретки 1 за время Т. Скорость вибродвигателя пропорциональна величине возбуждающего напряжения, поэтому расстояние, пройденной кареткой 1, равно т
S К I U(t)dt-T кит.
40
де U(t) - функция выходного сигнала интегратора 13, которая является огибающей возбуждающего напряжения генератора 7 на выходе управляемого усилителя 14; и - среднее значение сигнала
U(t) за время Т;«
К - коэффициент пропорциональности.
Если за S принять максимальное пеемещение каретки, то все остальные
35
ГС
возможные положения S каретки будут находиться в интервале S и будут в определенных соотношениях с максимальным перемещением, т.е. , или K-U-T-n , где п - может принимать значения от О до 1. Последнее выражение показывает что перемещение каретки на любое расстояние позиционирования может быть осуществлено путем умножения
0
5
Q
0
длительности и амплитуды выходного сигнала генератора 13, соответствующих максимальному перемещению каретки на квадратный корень от соот-. но.шения перемещения каретки 1 на заданное расстояние с максимальным перемещением. При одновременном изменении длительности и амплитуды сигнала U(t) в одинаковое число раз, т.е. при изменении масщтаба, крутизна соответствующих участков сигнала U(t) остается постоянной. Так как крутизна функции сигнала U(t) эквивалента ускорению каретки 1, одно- 5 временное изменение величины U(t) и Т в одинаковое число раз обеспечивает сохранение установленной допустимой величины ускорения каретки при любом расстоянии позиционирования в рабочем интервале.
Далее работа устройства происходит следующим образом.
При достижении кареткой 1 заданного блоком 11 положения, которое определяется по сигналу датчика 4, блок 11 программного управления закрывает ключ 8 и подает сигнал на переключатель 10 для реверса вибродвигателя 5. Перемещение каретки 1 в исходное положение осуществляется аналогичным образом.
Длительность Т выходного сигнала интегратора 13 определяется на 5-10% большей, чем необходимая для переме- 5 щения каретки 1 в заданную точку позиционирования. Этим исключается влияние дестабилизирующих факторов (изме- нения температуры и пр.), что способствует повышению точности позиционирования.
Блок 11 программного управления работает следующим образом.
По заложенной программе программное устройство 19 выдает сигнал реверса (направления движения), поступающий на переключатель 10, а также сигнал адреса позиционирования на схему 21 вычитания адресов и преобразователь 24 код-аналог, на- выходе которого образуется напряжение, пропорциональное запрограммированному адресу позиционирования, подаваемое на блок 17 соотношения. После этого С программное устройство 19 вырабатывает сигнал запуска, по шине запуска подаваемьй на один вход RS-триггера 23, который вырабатывает импульс, открывающий ключ 8 и передним фронтом
0
запускающий триггер 16. При перемещении каретки 1 импульсы датчика 4 положения считываются счетчиком 20 текущего адреса и подаются на схему 21 вычитания адресов. При совпадении в схеме 21 вычитания адресов адреса, запрограммированного в программном устройстве 19 и выдаваемого счетчиком 20 текущего адреса, нуль-дешифратор 22 вырабатывает сигнал, который опрокидывает RS-триггер 23, который в свою очередь выключает ключ 8. Сигнал с выхода нуль-дешифратора также подается на программное
fO
ченный к управляющим входам переключателя и ключа, а входом - к датчику положения, отличающее- с я тем, что, с целью повышения точности и быстродействия, оно снабжено последовательно подключенными управляемым генератором гармоничес- ких колебаний, интегратором и управляемым усилителем, блоком сравнения, триггером, блоком соотношения и источником опорного напряжения, при этом блок соотношения выходом подключен к одному управляющему входу управляемого генератора гармоничесустройство 19 для отработки следую- 15 ких колебаний, другой управляющий
вход Которого подключен к выходу триггера, а входами соответственно
щего положения программы Формула
изобретения подключен к источнику опорного напряжения и дополнительному выходу блоУстройство для управления позици- 20 ка программного управления, триггер
к
онирующим механизмом, содержащее пьезоэлектрический вибродвигатель, прижатый к каретке,(электроды которого через переключатель подключены к выходному усилителю, генератор воз-- буждающего напряжения, выходом подключенный к входу ключа, датчик положения и блок программного управления, выходами соответственно подклювходами соответственно подключен выходу блока программного Управления, подключенному к управляющему вход ключа, и выходу блока сравнения, входом подключенного к выходу управляемого генератора гармонических колебаний, а выход ключа через управляемый усилитель подключен к входу выходного усилителя.
ченный к управляющим входам переключателя и ключа, а входом - к датчику положения, отличающее- с я тем, что, с целью повышения точности и быстродействия, оно снабжено последовательно подключенными управляемым генератором гармоничес- ких колебаний, интегратором и управляемым усилителем, блоком сравнения, триггером, блоком соотношения и источником опорного напряжения, при этом блок соотношения выходом подключен к одному управляющему входу управляемого генератора гармонических колебаний, другой управляющий
к
входами соответственно подключен выходу блока программного Управления, подключенному к управляющему вход ключа, и выходу блока сравнения, входом подключенного к выходу управляемого генератора гармонических колебаний, а выход ключа через управляемый усилитель подключен к входу выходного усилителя.
(PU2.1
W
21
22
b-
Редактор Т. Парфенова
Составитель В. Алексеенко
Техред Л.Сердюкова Корректор ,С.Черни
Заказ 2166/15Тираж 787Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. А/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
19
W
2
2
17
4-
16
Фиг, 2
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА РАДИОЧАСТОТНОЙ ИДЕНТИФИКАЦИИ И ПОЗИЦИОНИРОВАНИЯ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2014 |
|
RU2559869C1 |
| Устройство для моделирования вибродвигателя | 1980 |
|
SU894742A1 |
| ИНФОРМАЦИОННАЯ СИСТЕМА СВЯЗИ | 1991 |
|
RU2019851C1 |
| Устройство для контроля параметров | 1988 |
|
SU1665390A1 |
| Устройство для управления шаговым вибродвигателем | 1980 |
|
SU920902A1 |
| Анализатор частотного спектра | 1980 |
|
SU900209A1 |
| Устройство для дуговой сварки с поперечными колебаниями сварочной горелки | 1983 |
|
SU1133059A1 |
| Устройство для управления инвертором | 1990 |
|
SU1709482A1 |
| Способ преобразования кода угла в напряжения,пропорциональные синусу и косинусу угла,и устройство для его осуществления | 1983 |
|
SU1136327A1 |
| Генератор гармонических сигналов | 1982 |
|
SU1037282A1 |
Изобретение относится к технике управления позиционирующими механизмами. Цель изобретения - повышение точности и быстродействия позиционирования. С помощью управляемого генератора гармонических колебаний, блока сравнения, триггера и интегратора формируется сигнал, который изменяется по синусоидальному закону с нуля в начале дистанции позиционирования до максимума посередине и до нуля к концу дистанции позиционирования. При помощи блока соотношения, источника опорного напряжения, управляемого генератора гармонического сигнала и интегратора изменяется амплитуда и длительность сигнала в одинаковое число раз, пропорциональное корню квадратному от соотношения заданной дистанции позиционирования с максимальной. Сформированным сигналом управляется напряжение питания вибродвигателя. 2 ил. о SS (Л :о ее О5 СП
| Бансявичюс Р.Ю | |||
| и др | |||
| Промьпплен- ные роботы для миниатюрных изделий | |||
| М.: Машиностроение, 1985, с | |||
| Приспособление для получения кинематографических стерео снимков | 1919 |
|
SU67A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
