. . 1. ,. :
Изобретение относится к аналого-цифровой вычислительной технике и может быть использовано для моделирования сложных динамических систем с реальными сЬударяющимися ; элементами..
Известны устройства для моделирования виброударных механических систем с двумя соударяющимися массами, однако они позволяют пр.иближенно провести 1оделирование виброударных механических систем с парой соударяющихся тел и сопровождаются большими конструктивными усложнениями при моделировании систем с несколькими соударяющимися массами 1 .
Наиболее близким по технической сущности к предложенному изобретению является устройство для моделировани;я; виброударны механических систем, содержащее возбудитель колебаний, вход которого соединен с выходом усилителя мощности, входом подключенного к выходу сумматора, первый вход которого соединен с первым выходом вычислительного блока, второй выход которого соединен с первым входом блока задания коэффициентов,
первый выход которого соединен с первым входом вычислительного блока, второй вход которого через блок усилителей подключен к выходу блока датчиков 2.
Однако, хотя в указанном устройстве и введены корректирующие цепи для уменьшения задержки в контуре, но из-за ничтожно малого времени соударения, оно не позволяет прабильно оценить ударные явления, особенно в случае моделирования сложных виброударных систем. . .
Цель изобретения - увеличение точности и расщирение функциональных возможностей устройства за счет моделирования ударных систем.
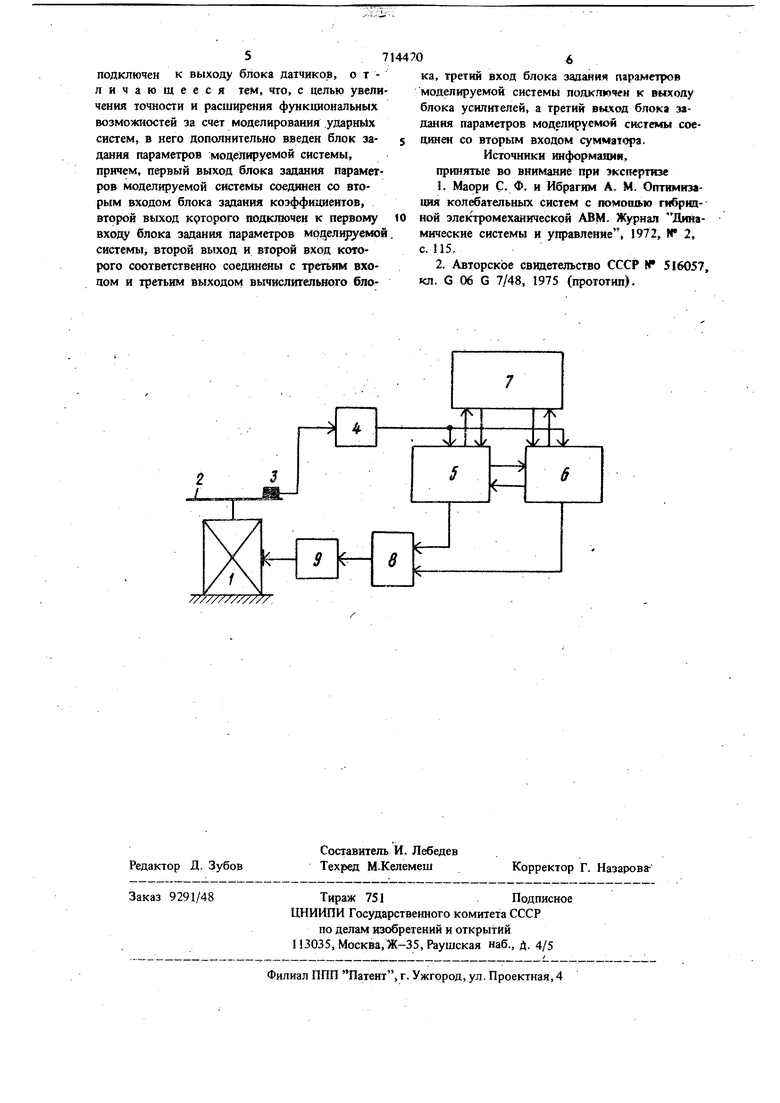
Поставленная цель достигается тем, что в устройство дополнительно введен блок задания параметров моделируемой системы, причем, первый выход блока задания параметров моделируемой системы соединен со вторым входом блока задания коэффициентов, второй выход которого подключен к первому входу блока задания параметров моделируемой системы, второй выход и второй вход которого соответственно соединены с третьим входом и третьим выходом вычислительного блока, третий вход блока задания параметров моделируемой сие-темы подключен к выходу блока усилителей, а третий выход блока задания параметров моделируемой системы соединен со вторым входом сумматора. На чертеже приведена блок-схема устройства .Устройство содержит возбудитель 1 с подвиж ной частью 2, блок датчиков 3, закрепленный на подвижной части 2, блок усилителей 4, взаимно между собой связанные, блоки задани параметров моделируемой системы 5, вычислительный блок 6, блок задания коэффициентов 7, сумматор 8, усилитель мощности 9. Устройство работает следующим образом. Подвижная часть 2 возбудителя колебаний 1 связана с неподвижным основанием упругостью и демпфером. Динамическая модель подвижной части возбудителя может быть описана дифференциальным уравнением вида: тх + сх + Их О,(1) где m - масеа подвижной части 2, с - коэффициент жесткости крепления подвижной части 2, h - коэффициент демпфирования, х,х,х- ускорение, скорость и положение подвижной части 2. При этом каждый уДар в подвижную часть с силой Руд. вызовет ее движение по уравне удтх + сх + Их F Если на вход возбудитеяя колебашй кодан сигнал, пропорциональный внешней силе Г-, приложенной к массе т, то движение подвижной части 2 можно определить ш уравнения: тх + сх + Их Руд.(3) При Известнь1Х параметрах вибратора c,h,m, которые легко определить или заранее известн изменением формы и величины силы Fg, а также материала или формы подвижной частй 2 возбудителя 1 может проведено модели вание вибрбударной системы, описываемой уравнением (3) с варьированием формы и величины силы, приложенной к массе т, формы и свойств контакта удара. Чтобы Можно было варьировать параметры т, И, с, системы введен блок управления параметрами моделируемой системы, который по входным сигналам с блока датчиков 4 про порциональным ускорению X, CKopoctH х и пе мещению х, может сформировать сигнал, пропорцяональИый сумме каждого из них, умноженного на различные козффициенть. Если эти коэффициенты равны соответственно а, в и к, то сигнал на выходе блока 6 будет следующим:ах + вх + к S .() Сигнал (4) с выхода блока 6 через сумматор 9 и усилитель 10 поступает на вход возбудителя и вызывает в нем силу, пропорциональную этому сигналу. Если S Fg, то движение подвижной части 2 определяется из уравнения: тх -t- сх + Их Fyд. + ах + вх -f к, (5) а, следовательно, MX и- Сх f Нх Руд.(6) где , , . Блок задания коэффициентов 8 может автоматически, по общеизвестным принципам, настраивать коэффициенты а, в, к на оптимальный режим функционирования моделируемой системы. Если моделируемая динамическая система описывается, например, уравнением (6), то в вычислительном блоке 7 реализуется модель, вьщающая сигнал, пропорциональный Сх / +Нху Он поступает через сумматор 9 и усилитель на вход возбудителя и вызывает силу, приложенную к массе М; F Сх + Нх .(7) Движение массы М при этом описывается уравнением: Ш + С(х-х,) + Н(х-х) Руд. (8) Чтобы провести автоматическую оптимизацию всей динамической системы в целом вычислительный блок 7 взаимно связан с блоком задания коэффиодентов 8. Таким образом, выполнение устройства в (XJOTBeTCTBiffl с изобретением позволяет получить высокую точность, так как исключен источник появления задержки, а возбудитель колебаний служит не имнтаторО1М координаты или силы, но является частью моделируемой виброударной механической системы, что позволяет правильно оценить удар в динамической системе. Кроме того, отсутствие необходимости измерения ускорения ударной массы не только исключает погрешности при оценке удара наличием связи, действующей на ударную массу, но и расширяет фз Jкциoнaльныe возможности, так как позволяет моделировать системы с больщим количеством ударных масс или динамические системы с сыпучей средой, состоящей из жестких элементов. ФормуланзобретеНия Устройство для моделирования виброударных механических систем, содержащее возбудитель колебаний, вход которого соединен с выходом усилителя мощности, входом подключенного к выходу сумматора, первый вход которого соединён с первым выходом вычислительного блока, второй выход которого соединен с первым входом.блока задания коэффициентов, первый выход которого соединен с первым входом вычислительного рлока, второй вход которого через блок усилителей
подключен к выходу блока датчиков, о т личающееся тем, что, с целью увеличения точности и расширения функциональных возможностей за счет моделирования ударных систем, в него дополнительно введен блок задания параметров :моделируемой системы, причем, первый выход блока задания параметров моделируемой системы соединен со вторым входом блока задания коэффициентов, второй выход крторого подключен к первому входу блока задания параметров моделируемой системы, второй выход и второй вход которого соответственно соединены с третьим входом и третьим выходом вычислительного блока, третий вход блока задания параметров моделируемой системы подключен к выходу блока усилителей, а третий выход блока задания параметров моделируемой системы соединен со вторым входом сумматора.
Источники информании, принятые во внимание при экспертизе
1.Маори С. Ф. и Ибрагим А. М. Оптимизация колебательных систем с помощью гнбридной электромеханической АВМ. Журнал Динамические системы и управление, 1972, Н 2, с. 115.
2.Авторское свидетельство СССР N 516057, кл. G 06 G 7/48, 1975 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для полунатурного моделирования виброударных механических систем | 1983 |
|
SU1251116A1 |
| Устройство для моделирования статических и динамических характеристик привода координатно-шлифовального станка | 1986 |
|
SU1437884A2 |
| Устройство для полунатурного моделирования | 1976 |
|
SU734734A1 |
| Устройство для моделирования статических и динамических характеристик привода координатно-шлифовального станка | 1983 |
|
SU1113817A1 |
| Устройство для полунатурного моделирования нелинейных колебательных систем | 1980 |
|
SU947877A1 |
| Устройство для полунатурного моделированияМЕХАНичЕСКиХ КОлЕбАТЕльНыХ СиСТЕМ | 1979 |
|
SU840963A1 |
| Устройство для полунатурного моделирования колебательных систем | 1980 |
|
SU922800A1 |
| Устройство для полунатурногоМОдЕлиРОВАНия | 1976 |
|
SU822218A2 |
| Устройство для моделирования пары трения | 1988 |
|
SU1628062A1 |
| Устройство для моделирования ударных систем | 1973 |
|
SU451102A1 |
