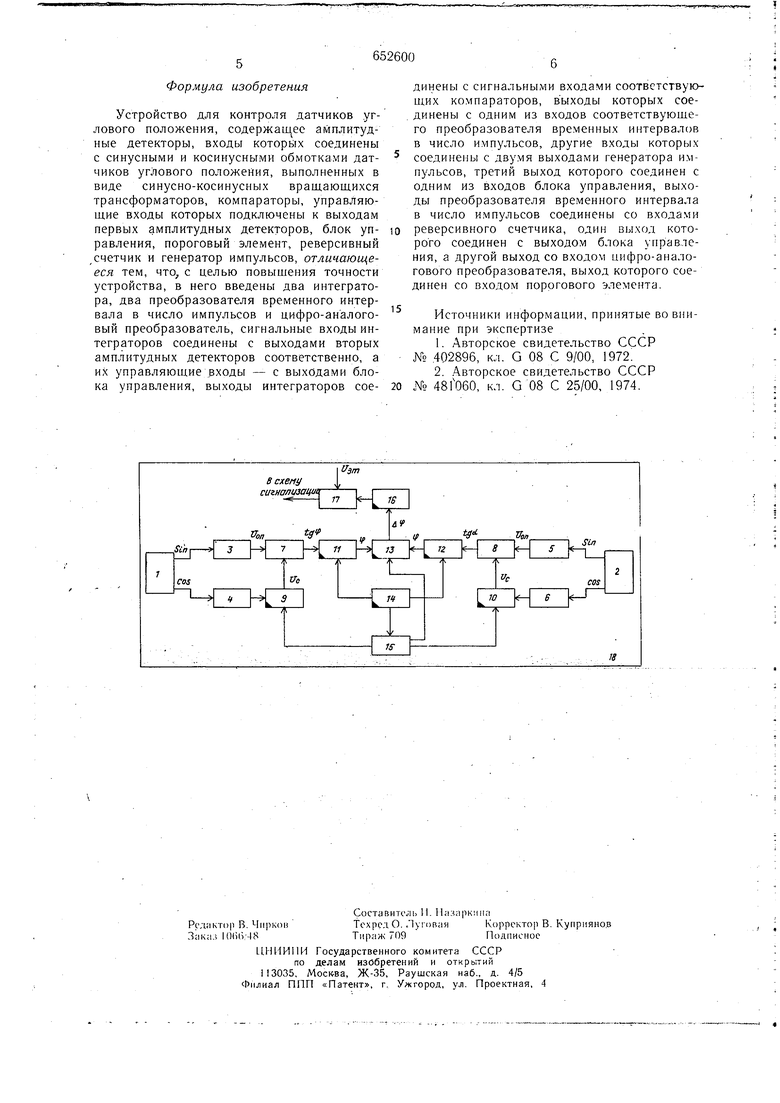
ков углового положений введены два интегратора, два преобразователя временного интервала в число импульсов н ЦАП,сигнальные входы интеграторов соединены с выходами вторых амплитудных детекторов соответственно, а их управляющие входы - с выходами блока упрар ления, выходы интеграторов соединены с сигнальными входами соответствуюни1Х компараторов, выходы которых соединеьи с одним из входов соответствующего преобразователя временных интервалов в число импульсов, другие входы которых соедииены с двумя выходами генератора имнульсов, третий выход которого еоединен с одним из входов блока управления, выходы преобразователя временного иитервала В4Н1сло импульсов соединены со входами реверсивного счетчика, один выход которого соединен с В1 1ходом блока унравлеиня, а другой выход со входом ЦАП, выход которого соединен со входом порогового элемента. На чертеже представлена функциоиальиая схема устройства. Устройство для контроля датчиков углового положения содержит датчики 1 и 2, амплитудные детекторы 3, 4, 5 и 6; компараторы 7 и 8; интеграторы 9 и 10, преобразователи временного интервала в число имнульсоБ 11 и 12 генератор импульсов 14, блок уиравления 15 цифро-аналоговый преобразователь (ЦАП) 16; пороговый элемент 17. Статорные обмотки датчиков 1 и 2 соединены с амплитудными детекторами 2, 4, 5 и 6. Выходь амплитудных детекторов 3 и 5 соединены с опорными входами компарато ров 7 и 8, а выходы амплитудных детекторов4и6 соединены с сигнальными входами И11те1раторов 9 и 10, управляющие входы которых соединены с выходами блока управления 15. Выходы интеграторов 9 и 10 соединены с сигнальными входами компараторов 7 и 8. Выходы компараторов 7 и 8 соединены со входами преобразователей 11, 12, другие входы которых соединены с выходами генератора импульсов 14, выход генератора импульсов.14 соединен со входом блока управления 15. Выходы преобразователей 11 и 12 соединены со входами реверсивного очетчика 13, один из входов которого соединен с выходом блока управления 15, а выход реверсивного счетчика 13 соединен со входом ЦАП 16. Выход ЦАП 16 соединен со входом порогового элемента 17, другой вход которого соединен с выходом источника эталонного напряжения. Сигнал с выхода порогового элемента 17 поступает всхему сигнализации. Устройство работает следующим образом. Сигналы синусной и косинусной обмоток, например датчика 1, выпрямляются амилитуд1{ыми детекто)ами 3 и 4, и поступаfOT иа,онорнь1й и сигнальный входы компаратора 7. При этом сигналы косинусной обмотки поступают на сигнальный вход компаратора 7 через интегратор 9. В начале каждого такта, определяемого блоком управления 15, косинусное напряжение на выходе ннтегратора 9 равно нулю, а синусное нанряжение равно определенной величине, соответствующей величине от клонення датчика 1 от исходного положения. Емкость интегратора 9 начинает заряжаться и в определенный момент времени напряжение на сигнальном входе, компаратора сравняется с онорным. Компаратор 7 скачком изменит свое состояние. Очевидно, что интервал време1Н1 от начала такта (начала заряда емкости интегратора) до мо.меита перехода компаратора 7 в другое состояние нронорционально tg|. С начала каждого такта нреобразовател() I I открывается и пропускает на вход pcBopciiJ3Horo счетчика 13 импульсы через заполнения генератора имнульеов 14 до момента переброса компаратора 7. Число импульсов на выходе преобразователя 11 за . пропорционально ,. Чтобы линеарисовать тангенсиую зависимость (т.е. по,, „ у, преобразователя число „ пульсов пропорциональное ,), преобра.ователь строится таким образом, что по истечении определенного числа импульсов иа выходе реверсивного счетчика 13 равно нулю. При рассогласованной работе датчиков 1 и 2 число импульсов на выходах преобразо„ателей II и 12 различно, их разность на выходе реверсивного счётчика 13 (по модулю) равна определенной величине. С выхода реверсивного счетчика 13 эта разность через ЦАП, 16 поступает на пороговый элемент 17 и, при достижений ее величины порогового напряжения, выдается сигнал о расхождении величины сигналов датчиков 1 и 2 большем допустимого. Работу устройства определяет генератор импульсов 14. Указанная работа проводится на участках (0-г45°) угла поворота датчика, а при помощи коммутатора участков может использоваться на каждом из 8 участков по 45° что перекрывает диапазон О-360°. При этом, в зависимости от участка, сииусное и косинусное напряжение поочередно меняются местами (на чертеже коммутатор участков не показан). Номер участка (открыт) гупределяется логической схемой иа основании результатов последовательной оценки фазы (прямая или обратмая) сииусиого и косинусного напряжений.
Формула изобретения
Устройство для контроля датчиков углового положения, содержащее амплитудные детекторы, входы которых соединены с синусными и косинусными обмотками датчиков углового положения, выполненных в виде синусно-косинусных вращающихся трансформаторов, компараторы, управляющие входы которых подключены к выходам первых амплитудных детекторов, блок управления, пороговый элемент, реверсивный ,счетчик и генератор импульсов, отличающееся тем, что, с целью повыщения точности устройства, в него введены два интегратора, два преобразователя временного интервала в число импульсов и цифро-аналоговый преобразователь, сигнальные входы интеграторов соединены с выходами вторых амплитудных детекторов соответственно, а их управляющие входы - с выходами блока управления, выходы интеграторов соединены с сигнальными входами соответствующих компараторов, выходы которых сое. динены с одним из входов соответствующего преобразователя временных интервалов в число импульсов, другие входы которых соединены с двумя выходами генератора импульсов, третий выход которого соединен с одним из входов блока управления, выходы преобразователя временного интервала в число импульсов соединены со входами реверсивного счетчика, один выход которого соединен с выходом блока управления, а другой выход со входом цифро-аналогового преобразователя, выход которого соединен со входом порогового элемента.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № .402896, кл. G 08 С 9/00, 1972
2.Авторское свидетельство СССР № 48f060, кл. G 08 С 25/00, 1974.
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь угла поворота вала в код | 1979 |
|
SU855711A1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2178896C1 |
| Способ измерения рассогласования между углами поворота,один из которых задан кодом | 1985 |
|
SU1285595A1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В КОД | 1980 |
|
SU1840148A1 |
| Способ управления многофазным инвертором и устройство для его осуществления | 1984 |
|
SU1458951A1 |
| Устройство для контроля датчиков углового положения | 1974 |
|
SU481060A1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В КОД | 2005 |
|
RU2282938C1 |
| Устройство для измерения рассогласования между углом и кодом | 1987 |
|
SU1411973A1 |
| Преобразователь угла поворота вала в код | 1987 |
|
SU1478331A1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2260195C1 |
