1
Изобретение относится к области автоматического контроля систем управления и может быть использовано в системах дистанционной передачи угла.
Известны хстройства для контроля датчиков углового положения, содержагцие амнлнтудные детекторы, соединенные с синусными и косинусными обмотками датчиков углового положения, выполпепны.х в виде синусно-косинусных вра1наюш,ихся трансформаторов, аналого-нифровые нреобразователи, и сумматор, выход которого нодключен к пороговому элементу.
Известные устройства обладают недостаточной точностью выявления углового рассогласовання при изменении питающих напряжений датчиков, изменении крутизны выходных сигналов датчиков.
Предложенное устройство отличается тем, что в него введены функциональные делители, блоки унравления, блоки выделения косинусного и синусного напряжений и блок логических элементов, нричем выходы а.мнлитудных детекторов, подключенных к косинусным об.мотка.м датчиков углового положения, соединены с опорными входами блоков унравлеиия и с аналого-цифровым нреобразователем через функциональные делители и блоки выделения косинусных напряжений, выходы амплитудных детекторов синусных обмоток соедннены с сигнальными входами олоков управления и через блоки выделения синусных напряжений подключены к аналого-цифровым преобразователям, выходы блоков унравления и выходы аналого-цифровых преобразователей подключены ко входам блока логических элементов, выходы которого подключенi i к сумматору.
Такое выполнение позволило повысить точность работы устройства.
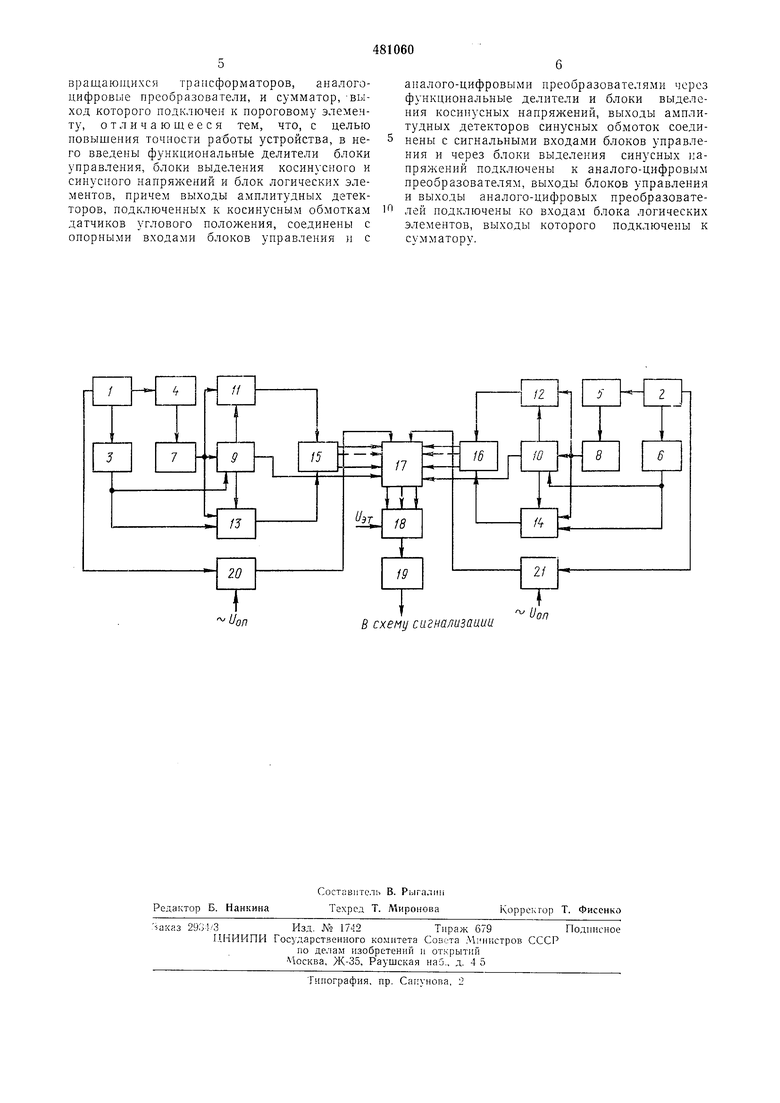
Иа чертеже приведена блок-схема предложенного устройства.
Оно содержнт датчики 1 и 2 углового положения, выполпенные в виде синзсно-косиHyciiHx вращаюндихся трансформаторов, амплптудные детекторы 3, 4, 5 li 6, функциональные делители 7 и iS, блоки управления 9 и 10, блоки 11 и 12 выделения косинусного нанряжения, блоки 13 и 14 выделения синусного нанряжеиня, аналого-цифровые преобразователи 15 и 16, блок 17 логических элементов, сумматор 18, пороговый элемент 19 и схемы знака 20 и 21.
В предложенном устройстве амплитудные детекторы 3, 4, 5 и 6, выполнены из диодов и фильтрующих емкостей, функционалы ые делители 7 и 8 выполнены на резисторах, блок унравлемия 9 состоит из комнараторов, вынолненных на операционных усилителях без внешней обратной связи, и параллельных
ключей, вытюлпениых iiia 1П11егралыП)х прерынатслях, блоки 11 -14 выделения cHiiyciiOio и косинусного нанряжений, состоят из онсрациоииых усилителей, включенных в 1масштабном режиме; аналого-цифровые преобразователи 15 и 16 состоят из вычитаюнцих усилителей, компараторов и параллельных ключей. Статорные обмотки датчика 1 соединены с амплитудными детекторами 3 и 4. Выход амнлитудного детектора 4 нагружен на функциональный делитель 7, выход которого соединен е опорными входами блока управления 9, с блоками 11, 13 выделения синусного и косинусного нанряжений. Выход амнлитудпо1о детектора 3 соедипен с сигнальным входом блока унравления 9 и с блоком 13 выделения синусного напряжения. Выходы блока 11 и 13 нодключены ко входам аналого-цифрового преобразователя 15.
Выход блока управления 9 и выходы аналого-цифрового нреобразоватсля 15 нодключены ко входам блока 17 ло1ических элементов, который таким же образом соединен с блоком унравления 10 и аналого-цифровым преобразователем 16.
Статорные обмотки датчиков 1 и 2 через схемы знака 20 также соединены с блоком 17.
Работа схемы показана па примере обработки выходных сигналов датчика 1.
Вынрямлепное напряжение косииусной обмотки датчика 1 поступает на функциональный делитель 7, образуя ряд напряжений па его выходах. Эти напряжения подают на опорные входы комнараторов блока унравления 9, а также на блоки 11, 13 выделения косинусного и синусного нанряжепий. Выпрямленное напряжение сииуепой обмотки датчика 1 поступает на ситнальные входы блока управления 9.
В исходном (нулевом) положении датчнка 1 (ср 0) косинусное нанряжепие имеет максимальную величину, а синусное напряжение равно нулк1. При этом компараторы блока управления 9 находятся в выключенном состоянии, следовательно на выходе блока 11, выделяющего Acoscp, панряжение соответств ет пе.рвому диапазону, т. е. О-cfi, а на выходе блока 13, выделяюицего Asincp, напряжение равно 0.
При отклонении выходных еигпалов ;1,атчика 1 от пулевого значения напряжение обмотки возраетает по мере увеличения угла и достигает зпачения, равного cpj, при этом срабатывает один из комнараторов блока унравления 9, напряжение на его выходе становится равным «логической единице, а в блок 17 выдается первая грубая отметка угла.
При дальпейнлем увеличении угла напряжение синусной обмотки последовательно достигает величииы, соответствующей величинам онорных нанряжений на выходах функционального делителя 7. При этом ерабатывают компараторы старших разрядов блока управления 9. Выходные сигналы этих компараторов соответствуют второй, третьей и четверTCiii грубым отметкам угла. Эти отметки так/ке поступают на блок 17. В1лходпые напряжеппя компараторов блока управления 9 используются также для коммутации синусного и косинусного нанряжепий таким образо%, что на выходах усилителей блоков И и 13формируютея напряжения, нредставляюн1,ие собой в увеличенном масштабе части синусного и косинусного напряжений, соответству;ощие
отметкам угла. Выходное иацря/ ;ение блока 11, формир} емое из косинусного сигнала, обозначается так --Acosrp. а выходпос напряжение, формируемое из косинусного и снпусного сиг1;алов, как -Asincp.
Схемы точных отметок гла выполнены на реп1ающих усилителях, компараторах (младН1ПХ разрядов) и интс|-ральпых прерывателях и представляют собой апалогсз-цифровой ,образовате;1ь 15, работающи по методу с авпепия-вычитапия.
Показаппаи работа стройства проводится па участках 0±45 углов юворота датчика, а при помощи коммутатора участков может использоваться па каждом кз 8 участков по
45°, что перекрывает диапазон О-360°. При этом в зависимости от участка синусное и косинусное напряжения поочередно меняются местами (на чертеже коммутатор участков не показап). Ыомег) участка (октант) определяется логической схемо)-; па основании результатов носледовательной оценки фазы (прямая нли обратная) сппуспого и косинусного напряжепия. Выход каждого компаратора апалого-цпфрового преобразователя 15 соединен с соответствуюплим ло1ическлм элементом блока 17, второй вход которой соединен е апалогичш м компаратором другого датчика. Выходы всех логических элементов блока 17 через мас1птабнь1С резисторы соединены с сх мматором 18, выход которого соединен с сигнальным входом порогового элемента 19.
При сипхро: ной работе сравниваемых дат4iiKOB 1 и 2 выход1;ые напряжения всех ксмliapaTopoB одипакош,, следовательно, выходные )1апрг:жепия всех логических элелзенто блока 17 равны . При Mecnnxponiioii i)c(боте сравниваемых датчиков 1 и 2 вь ходпыс напряжепия компараторов пе coBii.-iдать, на вг-1ходах ло1Ч1ческих э.темсптов блока 17 появляется «логическая единица, на выходе сч мматора 18 появится напряжепие, которое будет тем больпге, чем больше угол рассогласования между датчиками 1 и 2. При величипе напряжения, больше допустимого (порога), срабатывает пороговый элемент 19 и н. сигпал расхождепия.
i 1 Г; е j. м е т и з о б р е т е и и я
Устройство для контроля датчп; о;} .
го ноложепия, содержаniee амплитудные ::етекторы, соеди1 епные : си успыми и косинуспыми обмотками датчиков углового положепня, выполпепных в виде сипуспо-косинуеных
вращающихся трансформаторов, аналогоцифровые преобразователи, и сумматор, выход которого подключен к пороговому элементу, отличающееся тем, что, с целью повыщения точности работы устройства, в него введены функниональные делители блоки управления, блоки выделения косинусного и синусного напряжений и блок логических элементов, причем выходы амплитудных детекторов, подключенных к косинусным обмоткам датчиков углового положения, соединены с опорными входами блоков управления и с
аналого-цифровыми преобразователями через функциональные делители и блоки выделения косинусных напряжений, выходы амплитудных детекторов синусных обмоток соединены с сигнальными входами блоков управления и через блоки выделения синусных напряжений подключены к аналого-цифровым преобразователям, выходы блоков управления и выходы аналого-цифровых преобразователей подключены ко входам блока логических элементов, выходы которого подключены к сумматору.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В ЦИФРОВОЙ | 1973 |
|
SU408357A1 |
| Устройство для контроля датчиков углового положения | 1976 |
|
SU652600A1 |
| Преобразователь угла поворота вала в код | 1979 |
|
SU855711A1 |
| Преобразователь угла поворота вала в код | 1977 |
|
SU682931A1 |
| Устройство для контроля датчиков углового положения | 1976 |
|
SU615525A1 |
| БЛОК КОНТРОЛЯ ДВУХ КУРСОВЕРТИКАЛЕЙ | 2002 |
|
RU2227934C2 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2013 |
|
RU2533305C1 |
| Устройство для моделирования синусно-косинусного трансформаторного датчика угла | 1990 |
|
SU1778766A1 |
| Цифровой фазометр | 1983 |
|
SU1092427A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА ПОВОРОТА РОТОРА ДАТЧИКА УГЛА ТИПА СИНУСНО-КОСИНУСНОГО ВРАЩАЮЩЕГОСЯ ТРАНСФОРМАТОРА | 2015 |
|
RU2598309C1 |
Т
Uon
Uon
В схему сигнализации
