(54) ГИДРАВЛИЧЕСКИЙ ПРИВОД МЕХАНИЗМА КОПАНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления гидравлическим экскаватором | 1989 |
|
SU1778249A1 |
| Гидропривод одноковшового экскаватора | 1981 |
|
SU1004551A1 |
| Двухпоточный гидропривод экскаватора | 1979 |
|
SU891869A1 |
| Двухпоточный гидравлический привод рабочего оборудования одноковшового экскаватора | 1986 |
|
SU1330277A1 |
| Гидропривод одноковшовного экскаватора | 1974 |
|
SU541946A1 |
| Гидравлический привод рабочего оборудования одноковшового экскаватора | 1986 |
|
SU1313979A1 |
| Гидропривод землеройной машины | 1980 |
|
SU1036862A1 |
| Гидросистема специального оборудования транспортно-заряжающей машины на колесном шасси | 2021 |
|
RU2787601C1 |
| Система сервоуправления гидроприводом экскаватора | 1983 |
|
SU1079780A1 |
| Гидропривод стрелы экскаватора | 1989 |
|
SU1661479A1 |
Изобретение относится к системам управления рабочим оборудованием экскаватора и может использоваться в приводе механизмов копания, а также в машинах, в которых необходимо обеспечить ограничение усилия, развиваемого каким-либо одним рабочим органом, в том случае, когда эта загрузка обусловлена работой другого рабочего органа этой машины.
Известен гидравлический привод механизмов копания одноковшового экскаватора, содержащий механизм подъема стрелы и механизм поворота рукоятки, каждый из которых имеет регулируемые насосы, распределительную аппаратуру и исполнительные механизмы 1.
Механизмы подъема стрелы и поворота рукоятки этого экскаватора не связаны друг с другом и работают самостоятельно.
Независимое действие механизма подъема стрелы и поворота рукоятки на этой машине не позволяет обеспечить постоянное усилие на зубьях ковша при повышенной скорости копания, что усложняет управление экскаватором, привод к перегрузкам
в механизме поворота рукоятки, его установкам и удлинению цикла экскавации.
Известен также гидропривод механизма копания, содержаший механизм подъема стрелы и механизм поворота рукоятки,
включающие насосы, исполнительные механизмы, гидролинию, распределительную и регулирующую аппаратуру 2.
Недостаток этой конструкции заключается в невозможности обеспечения работы механизма копания в режиме максимальной мощности с постоянным, усилием на зубьях ковша, поскольку работа механизма копания связана с работой механизма поворота. Цель изобретения - обеспечение постоянного усилия на зубьях ковща при повышенной скорости копания.
Это достигается тем, что в приводе установлен блок золотников, содержащий гидравлически управляемый золотник и два золотника ручного управления, один из которых
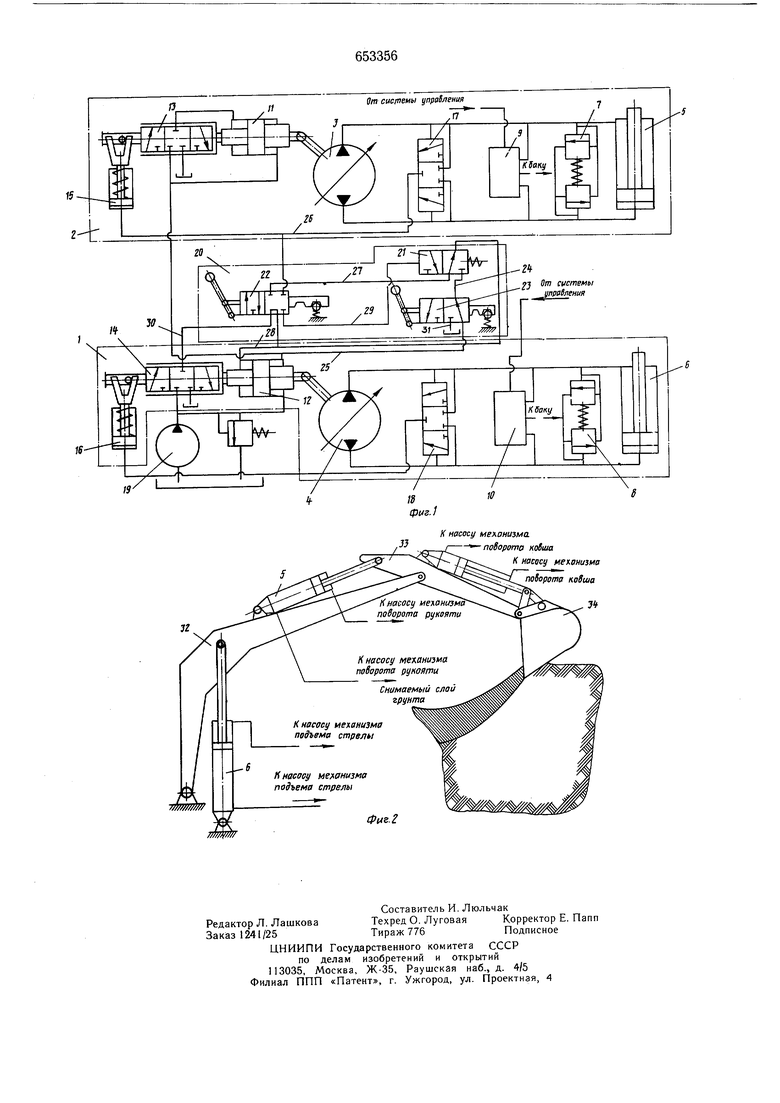
включен в гидролинию, соединяющую следящий золотник с гидроусилителем насоса механизма подъема стрелы в напорную гидролинию насоса механизма поворота рукоятки и в гидролинию управления гидравлически управляемого золотника, а другой включен в гидролинию насоса управления механизмом в сливную гидролинию и к гидравлически управляемому золотнику, установленному на гидролинии, соединяющей первый золотник ручного управления с гидроусилителем насоса механизма подъема стрелы. На фиг. 1 приведена гидравлическая схема привода механизма копания; на фиг. 2.- кинематическая схема механизма копания. Гидравлический привод механизма копания имеет механизм 1 подъема стрелы и механизм 2 поворота рукоятки. Каждый механизм содержит регулируемые реверсивнйе насосы 3 и 4, гидроцилиндры 5 и 6, предохранительные клапаны 7 и 8, предохраняющие механизмы ot перегрузок, управляемые золотники 9 и 10, служащие для соединения всасывающих магистралей насосов 3 и 4 с баком (на чертеже условно не показан). Производительность насосов 3 и 4 изменяется гидроусилителями 11 и 12, имеющих дифференциальные порщни и управляемых следящими золотниками 13 и 14. Системы управления механизмом 1 и 2 предусматривают ручное и автоматическое управление насосами 3 и 4. Для ручного управления установлены рукоятки (условно не показаны), кинематически соединенные со щтоками следящих золотников 13 и 14, а для автоматического управления при перегрузках установлены копиры измерительных элементов 15 и 16, соединяемых с напорными магистралями золотниками 17 и 18. Копиры измерительных элементов воздействуют на щтоки следящих золотников 13 и 14. Кроме того, объемный гидропривод механизмов копания содерл ит насос управления 19, питающий гидроусилители 11 и 12, и блок золотников 20, включающий гидравлически управляемый золотник 21, управляющий гидроусилителе.м 12 в зависимости от загрузки механизма 2, и золотники 22 и 23 ручного управления. Золотник 22 исключает, в случае необходимости, совместную работу механизмов подъема стрелы и поворота рукоятки (при работе на скальных грунтах), а золотник 23 соединяет магистраль 24 либо со сливом, либо с насосом 19 через магистраль 25. Соединение золотников 21, 22 и 23 между собой, гидроусилителем 12 и напорной магистралью механизма 2 и сливом осуществляется с помощью трубопроводов 26-31. Гидроцилиндр 6 поднимает и опускает стрелу 32 и гидроцилиндр 5, рукоятку 33, следовательно поворачивает ковщ 34, который производит копание. Золотник 22 включен в трубопровод 30, соединяющий следящий золотник 14 с гидроусилителем 12 насоса 4 механизма подъема стрелы 32, а также в напорную магистраль 26 насоса 3 механизма поворота рукоятки 33 и в линию управления 29гидравлически управляемого золотника 21, а другой золотник ручного управления 23 включен в линию 25 насоса управления 19, в сливную магистраль 31 и магистраль 24 гидравлически управляемого золотника 21, установленного на линии 27, соединяющей золотник ручного управления 22 с гидроусилителем 12 насоса 4 механизма подъема стрелы посредством магистрали 28. Каждый из механизмов 1 и 2 при положении золотника 22, изображенном на чертеже, исключающем их взаи.модействие, работает следующим образом. Оператор, воздействуя на щток золотника, например 13, сообщает управляемую (большую) полость гидроусилителя 11 либо со сливом, либо с насосом 19, нагнетающим рабочую жидкость в систему управления. Поскольку рабочая жидкость от насоса 19 постоянно подведена в меньщую полость гидроусилителя, со стороны которой плон;адь порщня меньще в 2 раза, чем его площадь со стороны больщей полости, то в случае соединения последней со сливом, поршень гидроусилителя перемещается влево, а при соединении с насосом 19 - вправо, чем достигается необходимая производительность и реверсирование насоса 3, а следовательно, и необходимая скорость и направление перемещения поршня гндроцилиндра 5 и рукоятки 33. При выводе насоса 3 на максимальную производительность, ролик, укрепленный на нтоке золотника 13, касается поверхности копира измерительного элемента 15, который постоянно соединен золотником 17 с напорной .магистралью 26 насоса 3. Возникающие в процессе копания перегрузки приводят к росту давления в системе и перемещению копира измерительного элемента 15, что приводит к перемещению следящего золотника 13 в сторону нейтрального его положения и уменьшению производительности насоса. Механизм 1 работает аналогичным образом. Величина загрузки механизма поворота укоятки 2 в значительной степени опрееляется положением поршня гидроцилинра 6, а следовательно, и стрелы 32, мехаизма подъема стрелы 1, так как последняя, ак известно, устанавливает толщину стружи снимаемого грунта. Совместная работа механизмов 1 и 2 беспечивается установкой рукоятки золотика 22 в крайнее правое положение, при отором происходит разобщение магистраей 23 и 30 и соединение трубопроводов 0, 27 и 28 через золотник 21, а также содинение трубопроводов 26 и 29, обеспечиающих соединение полости управления золотника 21 посредством золотника 17 с напорной магистралью 26 насоса 3. Рукоятка золотника 21 при этом занимает или крайнее правое, или левое положение, соединяя магистраль 24 или со сливом, через магистраль 31, или с насосом 19 посредством магистрали 25.
Если увеличение толщины стружки снимаемого грунта связано с ростом производительности насоса 4, при котором в большую полость гидроусилителя 12 подается рабочая жидкость от насоса 19, то магистраль 24 соединяется со сливом и рукоятка золотника 23 становится в крайнее правое положение.
В противном случае она устанавливается в крайнее левое положение.
Возникающая при работе механизма 2 перегрузка вызывает увеличение давления в напорной магистрали, что приводит к перемещению золотника 21, который соединен с ней золотником 17, трубопроводом 26, золотником 22 и трубопроводом 29.
При определенном значении давления в напорной магистрали механизма 2, золотник 21 переместится настолько, что разобщит магистрали 27 и 28 и произведет остановку гидроусилителя 12, насоса 4, гидроцилиндра 6 и стрелы 32. При дальнейшем увеличении давления золотник 21 соединяет магистрали 24 и 28, что приведет к реверсированию гидроусилителя 12, поскольку в его большую полость по магистрали 24 подается импульс противоположного знака - насос 3 также реверсирует и стрела 32 поднимается, уменьшая толщину стружки снимаемого грунта. Последнее приведет к уменьшению нагрузки в механизме 2, после чего золотник 21 под действием пружины снова занимает крайнее левое положение.
приводя систему в исходное состояние. Предварительная затяжка пружины золотника 21 слабее затяжки пружины измерительного звена 15, благодаря чему работа механизма 2 происходит с максимальной производительностью.
Формула изобретения
Гидравлический привод механизма копания, содержащий механизм подъема стрелы и механизм поворота рукоятки, включающие насосы, исполнительные механизмы, гидролинию, распределительную и регулирующую аппаратуру, отличающийся тем, что, с целью обеспечения постоянного усилия на. зубьях ковша при повышенной скорости копания, в приводе установлен блок золотников, содержащий гидравлически управляемый золотник и два золотника ручного управления, один из которых включен в гидролинию, соединяющую следящий золотник с гидроусилителем насоса механизма подъема стрель, в напорную гидролинию насоса механизма поворота рукоятки и в гидролинию управления гидравлически управляемого золотника, а другой включен в гидролинию насоса управления механизмом в сливную гидролинию и к гидравлически управляемому золотнику, установленному на гидролинии, соединяющей первый золотник ручного управления с гидроусилителем насоса механизма подъема стрелы.
Источники информации, принятые во внимание при экспертизе
к насосу мех-анизма. - поворота ко1ша
К насосу AffxowjMO поборота иовша
3 5
