Известны выключатели в виде рычага, установленного на шарнирной опоре, расположенной ниже центра тяжести рычага, и снабженного на своем свободном конце грузом.
Предлагаемое контактное устройство состоит из нескольких таких выключателей и предназначено для селективного упраВоЧения контактами без помощи рук.
Для осуществления этой задачи контактное устройство, согласно изобретению, монтировано на надеваемом на голову оператора держателе, в плоскости симметрии которого расположена горизонтальная ось качания рычагов, ле ремещающихся в одно из крайних положений при наклОНе головы вправо или влево и запираемых в этих положениях защелками, поворотными на горизонтальных осях, лежащих в плоскостях, перпендикулярных плоскости симметрии, и освобождающими соответствующие рычаги наклоном головы вперед на тот или иной угол.
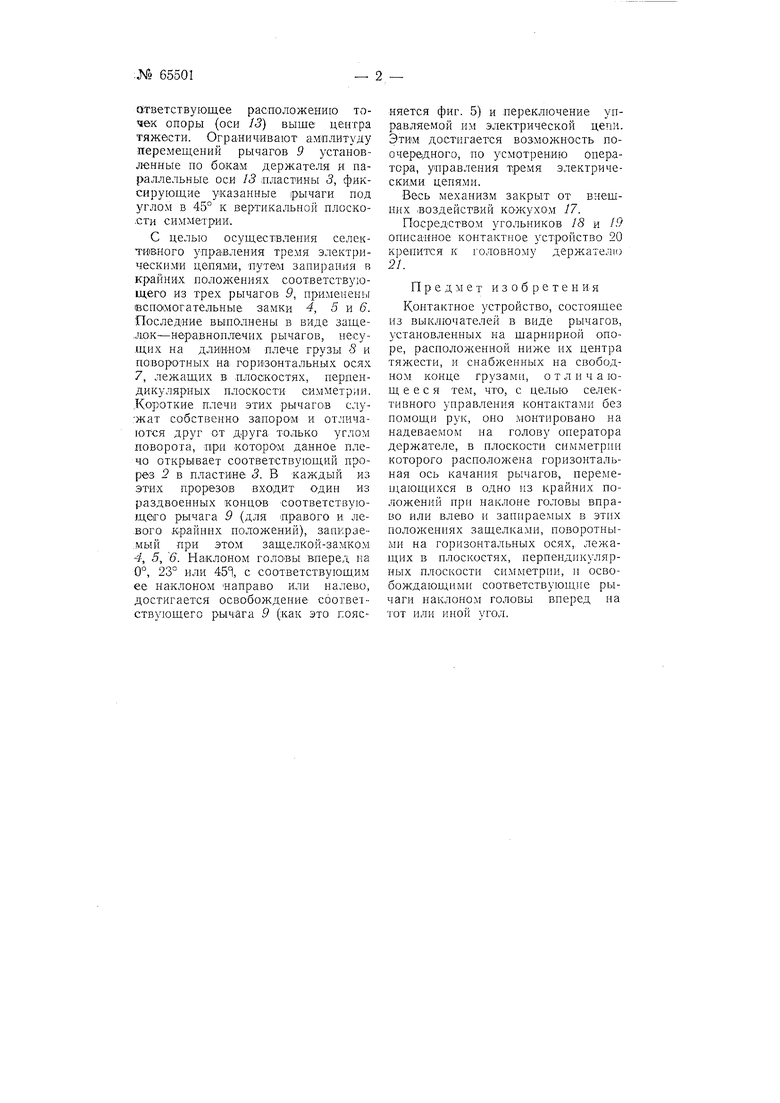
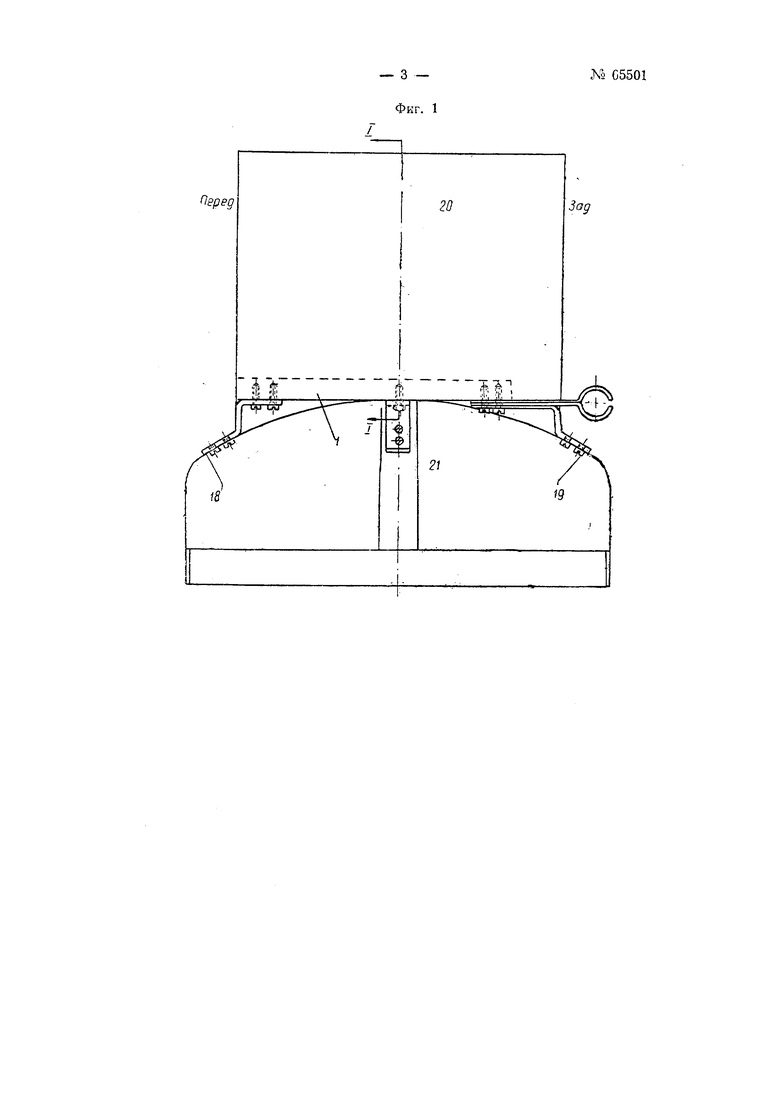
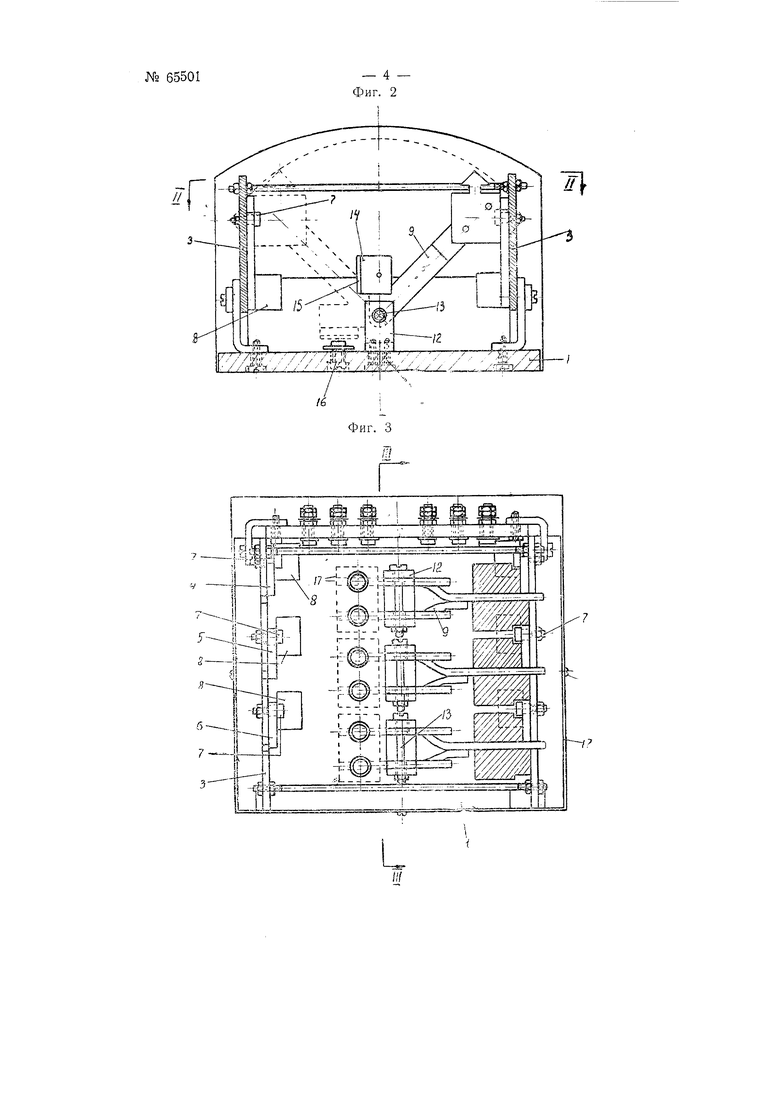
На чертеже фиг. 1 изображает общий вид сбоку устройства, монтированного на головном держателе, фиг. 2 - разрез контактного
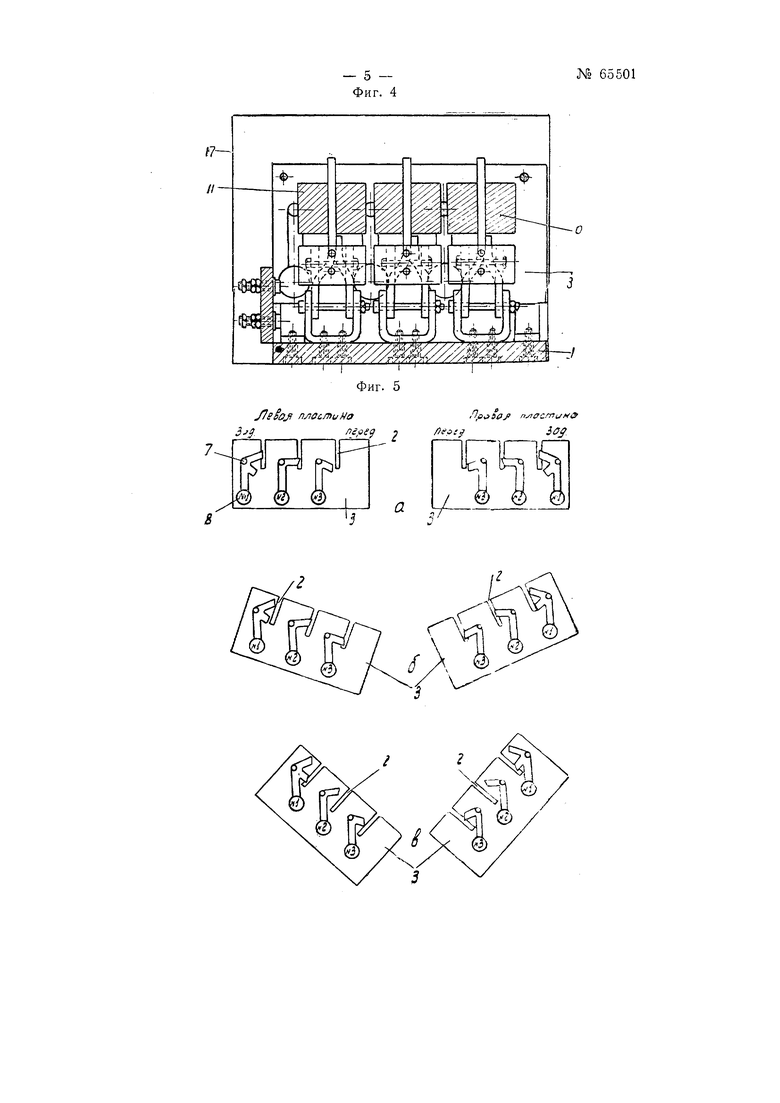
устройства по линии /-/ на фиг. i, фиг. 3- разрез то линии //-// на фиг. 2, фиг. 4-разрез по линии ///-Я/ на фиг. 3; фиг. 5 а, б, и в показывает различные положения замыкающего приспособления при различных наклонах головы вперед (а-на 0°, б-на 23° и 0-на 45°).
Выключатели, составляющие основную часть предлагаемого .контактного устройства, вьшолнены в виде рычагов 9, качааощихся на горизонтальной оси 13, расположенной ниже центра тялсести рычагов в плоскости симметрии держателя, надеваемого на голсзу оператора. Ось 13 установлена в подщипииках 12, закрепленных винтами на основании 7 держателя.
Каждый из этих выключателей представляет собой неравноплечий рычаг, короткое плечо которого несет эбонитовые колодочки 14 с контактными пластинами 15, замыкающимися с неподвижными контактами J6 в одном ИЗ крайних положений рычагов. Длинные плечи рычагов S несут грузы JO и //, а концы их раздвоены для запирания этих рычагов IB крайних положениях.
Рычаги 9 всегда стремятся повернуться и занять положение, соатветствующее расположению точек опоры (оси 13) выше центра тяжести. Ограничивают амплитуду перемещений рычагов 9 установленные но бокам держателя и параллельные оси 13 пластины 3, фиксирующие указанные рычаги нод углом в 45° к вертикальной нлоско.сги симметрии.
С целью осуществления селективного управления тремя электрическими цепями, nyTeiM запирания в крайних положениях соответствующего из трех рычагов 9, применены есномогательные замки 4, 5 и 6. Последние выполнены в виде заще.лок-неравнонлечих рычагов, несущих на длш-шОМ плече грузы 5 и поворотных на горизонтальных осях 7, лежащих в плоскостях, перпендикулярных плоскости симметрии. Короткие нлечи этих рычагов слу:жат собственно запором и отличаются друг от Друга только углом поворота, при котором данное плечо открывает соответствующий прорез 2 в пластине 5. В каждый из этих прорезов входит один из раздвоенных концов соответствующего рычага 9 (для правого и левого крайних положений), запираемый при этом защелкой-замком 4, 5, 6. Наклоном голо-вы вперед на 0°, 23° или , с соответствующим ее наклоном направо или налево, достигается освобождение соотве-iствующего рычага 9 (как это поясняется фиг. 5) и переключение управляемой им электрической цепи. Этим достигается возможность поочередного, по усмотрению оператора, управления тремя электрическими цепями.
Весь механизм закрыт от внешних .воздействий кожухом 17.
Посредством угольников 18 и / описанное контактное устройство 20 крепится к головному держатели; 21.
Предмет изобретения
Контактное устройство, состоящее из выключателей в виде рычагов, установленных на шарнирной опоре, расположенной ниже нх центра тяжести, и снабл енных на свободном конце грузами, отличающееся тем, что, с целью селективного управления контактами без помощи рук, оно монтировано на надеваемом на голову оператора держателе, в плоскости симметрии которого расположена горизонтальная ось качания рычагов, перемепдающихся в одно из крайних положений при наклоне головы вправо или влево и запирае;мых в этих положениях защелками, поворотными на горизонтальных осях, лежащих в плоскостях, перпендикулярных плоскости симметрии, н освобождаюпдпмп соответствующие рычаги наклоном головы вперед на тот или иной угол.
М С5501
3 - Фиг. 1
| название | год | авторы | номер документа |
|---|---|---|---|
| Предохранительный щиток для сварщиков | 1944 |
|
SU66092A1 |
| Устройство для механотерапии позвоночника | 2015 |
|
RU2612842C1 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ СИГНАЛОВ СО СТАНЦИИ НА ПОЕЗД | 1925 |
|
SU4519A1 |
| Устройство для испытания упругости пружин Бурдона | 1938 |
|
SU54354A1 |
| Машина для укупоривания бутылок пробками | 1947 |
|
SU71890A1 |
| ГИРОСКОПИЧЕСКИЙ ПРИБОР | 1932 |
|
SU38555A1 |
| МЕХАНИЗМ ПЕРЕЗАРЯЖАНИЯ НЕСАМОЗАРЯДНОГО ПИСТОЛЕТА | 2010 |
|
RU2447387C1 |
| ВЫСОКОВОЛЬТНЫЙ ВАКУУМНЫЙ ВЫКЛЮЧАТЕЛЬ | 1998 |
|
RU2137240C1 |
| Гидравлический пресс для холодной раскатки капп и дисков | 1950 |
|
SU95457A1 |
| Устройство для передачи пачки длинномерных изделий от транспортного средства к питателю | 1989 |
|
SU1684198A1 |
Перед
Зад
20
21
№ 65501
