I
/изобретение относится к землеройным машинам, в частности к гидроприводу объемного регулирования.
Известен гидропривод, в котором привод рабочего органа непрерывного дейст ВИЯ обеспечивается гидромотором с пита наем от насоса постоянной производите ль ности. Привод хода или механизм подачи осуществляется гидромотором с питанием от насоса постоянной производительности. Скорость привода хода бесступенчато регупируется дросселем с регулятором, установленным параллельно гид-ромоторур.
Недостатком известного гидропривода является невозможность обеспечения оптимального процесса копания в разнооб азных групповых условиях.
Известен также гидропривод; землеррйной машины, в котором насос постоянного расхода соединен напорной магистралью с гидромотором рабочего органа, а насос переменного расхода соединен напорной магистралью с гидромотором передвижения, в котором установлен регу
2
пятор с дросселем, при этом напорные магистрали соединены между собой l2 J.
Недостатком этого гидропривода я&ляется также невысокая его производительность.
Целью изобретения является увеличе.ние производительности гидропривода.
Это достигается тем, что соединения магистралей выполнено с помощью автоматического переливного клапана, установленного в напорной магистрали постоянного расхода, полости управления которого соединены трубопроводами со входом и выходом, дросселя, причем в полости, соединенной с выходом дросселя, установлена возвратная пружина.
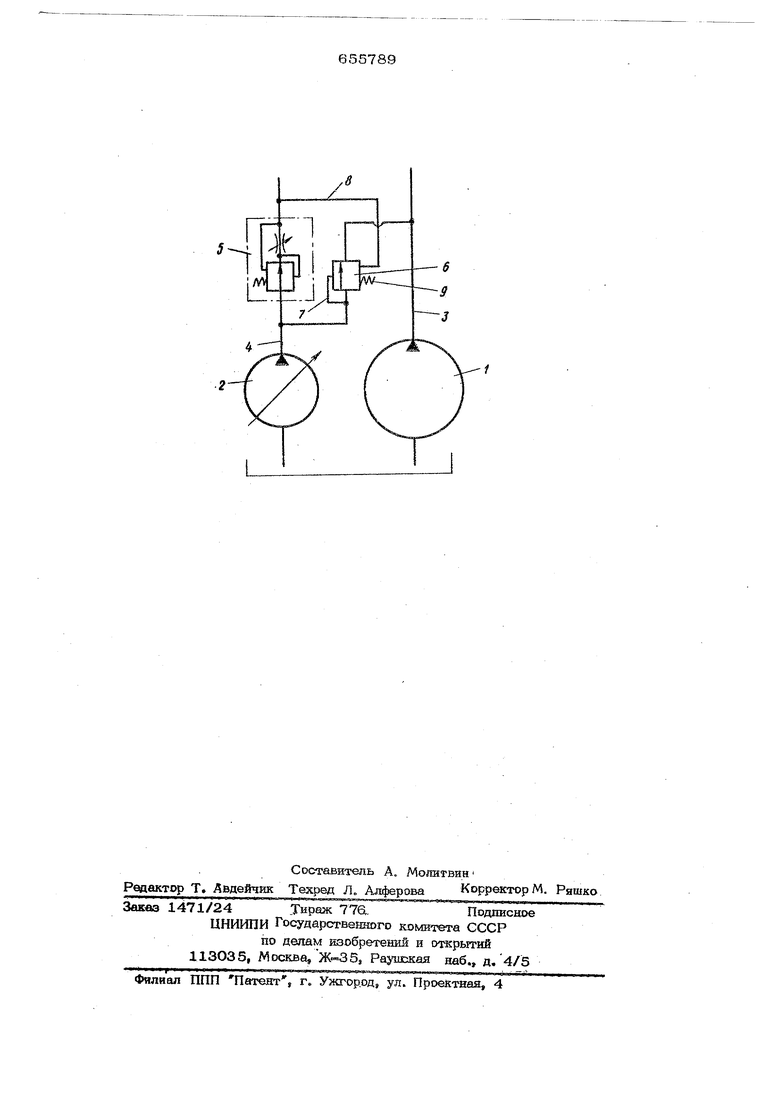
На чертеже изображен гидропривод землеройной машины непрерывного действия применительно к траншейному экскаватору.
Гидропривод содержит насос i постоянной производительности и регулируемый насос 2. Насосы имеют напорные гидролинии сортветственно 3 и 4. На гидролинии 4 установлен дроссепь с регулятором 5. Гйдропинии 3 и 4 соелиие-ны между собой через перепийной клапан 6 с попостями гидроуправпения. Одна полость управпеняя клапана 6 соеди5гена гидроли йей 7 с гидролннней 4 между насосом 2 и дросселем с регулятором 5 Другая полость управления соединена гидропинией 8 с гидропинией 4 на выход дросселя с регулятором. 5. В этой послед ней полости управления установлена возвратная пружина 9. Установочная мощность насоса 2 не превышает общей установочной мощности станции. Производительность насоса 1 расчита на на получение некоторой средней, наиболее распространенной и рациональной скорости вращения рабочего органа. Мак симальная производительность насоса 2 расчнтана на обеспечение максимальной скорости рабочего передвижения и не6б ходи мое приращение скорости рабочего органа. При работе экскаватора в режиме копания жидкость от насоса 1 направпяет- ся к гидромотору рабочего органа, обесп чивая его вращение с некоторой наиболее рациональной скоростью. Величина этой скорости (с точностно до потерь) определяется соотношением; . где:Ми - производительность насоса 1, см / с; характерный объем гидромотора привода рабочего органа, см . Рабочая жидкость от насоса 2 напргш ляется двумя потоками: один поток идет через дроссепь с регулятором 5, в соот ветствии с установкой его рукоятки управления К гидромоторам передвижен{щ, другой поток идет через переливной кпа пан б к гидромоторам рабочего органа, сообщая ему требуемое приращение ско« рости вращения. При этом справедливо следующее очевидное соотношение: Q a.SWj,)p SWp3CM /c ( где: ( скорость гидромоторов пере. движения, 1/с; 2V/X характерный объем гидромот ров передвижения, см , С другой стороны; г.к. дроссель с регулятором 5 установлен последоватепь чо насосу 2, можно записать , что: 0; 5iW.. лк де: параметр регулирования россельного регулятора; дро максимальный расход, на оторый рассчитан дроссель с регулятоом, . Очевидно, что .. Одро xmoix SWx (4) Таким образом, скорость передвиже ния экскаватора меняется бесступенчато и независимо от того, какова в это ремя скорость вращения рабочего органа. Когда н -Гн Но ТАр-Здр- ро тогда-оУр +ЛШро, КогдаТнз н, , тогда UJpoAciUpo, а приТн- НО ТАР QAPO, J ра роИз рассмотрения перечисленных неравенств следз ет, что скорость рабочего органа также меняется бесступенчато, но зависит от скорости передвижения. Например, при увеличении скорости передвижения в соответствии с выражением 2 скорость вращения рабочего органа самопроизвольно упадет. Чтобы сохранить скорость вращения рабочего органа на прежнем уровне или изменить ее нужным образом, мащинист должен соответственно изменить установку управления насоса 2 (f }. Эта задача может рещаться вручную или автоматически, если сио тема управления насосом 2 ц дросселем с регулятором 5 сблокирована. Автоматическое действие переливного клапана 6 обеспечивается гидролиниями 7 и 8. При перепаде давления на аросселе 5 в 2,5«.3 кГс/см (что, как известно, всегда обеспечивается его регулятором при нормальной работе), когдаАР 3,54,О кГс/см/ переливной клапан 6 свободно открыт и практически не представляет 1шкакого сопротивления. Режим может нарушаться только в том случае, когда из-за малого сопротивления на рабочем органе давление перед дросселем с регулятором 5 упадет настолько, что перепад давления на нем станет ниже до|й.итамого:, Ар 3 3,5-4,0 кге/см где ДРдрЗ - минимальный допустимый перепад давления на дросселе с регулятором В этом случае нарушится бадане сил управления на переливном клапане 6, и его проходное сечение умень- шктся представляя собой уже некоторое о6 сопротивление. Переходной процесс в системе будет происходить до тех пор, пока не наступит равновесие в совокуп ной системе дроссепя с регулятором 5 и перепивного кпапана 6. Это равновесное состояние можно описать спедующим соотношение м: Ркл Р ПлРдрЗ-Рр,(5) где : Р давление в напорной гидропннии гидромотора механизма передвижений, определяемое сопротивлением передвижению машины; Рро Давпение в напорной гидролкнии гидромотора рабочего органа, опре делнемое сопротивлением копанию. Очевидно, и поэтому без ощутимой погрешности можно записать: «. ДРчл Рх-Рро Недостатком системы дроссельного регулирования является снижение энер-гетических показателей из-за потерь эне гии на дросселирование. Одна ко,, у казенные потери энергии будут не столь ощутимы, как эго может показаться на первый взгляд. Объясняется это следующими обстоятельствами: 1/ Как правило, перепад давления ДР РХ - Рро при эксплуатации будет сравнительно невелик, если приводы рассчитаны правильно. 2/ При Рро РХ переливной клапан 6 Не представляет собой сопротивления и ДРкл2 ;0. 3/ Когда РХ - Рро 3,5-4,ОкГс/см имеют место потери iHa дроссепирован ие Ь переливном клапане 6. Однако, при. этом потери на дроссепирование в дросс пе с регулятором 5 практически отсут ствуют, так как он работает на перепад давлений 3,5-4,О кГс/см В обычных ус ловиях применения, например, в экскаваторе-дреноукладчнке ЗТЦ-2О2А, дроссел с регулятором работает на существенно большем перепаде давления, практически равном давлению в напорной линии гЬд9ромотора передважения, которое определяется сопротивгееняем передвижению. 4/ В исключительных спучаях эксппуатации, когда вепичнна Ц существенно бопьше f , нет надобности в форсировй НИИ скоростного режима рабочего органа, и машинист может, управляя насосом 2 свестиДОУрок минимуму, ограничив тем самым расход аросселирования через переливной клапан 6. На режиме транспортного передвижения экскаватора дроссель с регулятором 5 закрыт, и расход насосов 1 и 2 су мируется через переливной клапан 6 при перепаде давления на нем 3,5-4,ОкГс/см Суммарный поток направляется к гидромоторам передвижения машины. Формула изобретения Гидропривод землеройной машины, содержащий насос йостоянного расхода, соединенньй напорной магистралью с гндромотором рабочего органа, насос пореме1ьного расхода, соединенный напорной магистралью с гидромоторакт перодвижония, в которой установлон регулятор с дросселем при этом напорные магистрали соединены между собой, отличающийся тем, что, с целью увеличо- ния производительности, соединение магистралей выполнено с помошыо аьтомагаческого переливного клапана, установленного в напорной магистрали посгоян- пого расхода, полости управления которого соединены трубопроводами со EIXO - дом и выходом дросселя, причем в полости, соединенной с выходом дросссутя, уо- тановлена возвратная пружина. Источники информации, принятые во В1шмание при экспертизе 1.М. Л. Фай14зишбер Оптимальные рабочие режимы траншейных экскаваторов Строительные и дорожные машины, М 1975, г9 6. 2.Пате 1т Великобритании fo 1361861, кл. Е 1 F, 1974.
-6 -9 -J
| название | год | авторы | номер документа |
|---|---|---|---|
| Землеройная машина | 1979 |
|
SU861510A1 |
| Гидравлический привод шлифовального станка | 1980 |
|
SU895615A1 |
| Землеройная машина | 1982 |
|
SU1060771A1 |
| Гидропривод механизма передвижения экскаватора | 1976 |
|
SU945308A1 |
| Гидромеханический ходоуменьшитель землеройной машины | 1983 |
|
SU1089214A1 |
| Гидропривод машины для рытья траншей | 1979 |
|
SU878873A1 |
| Гидропривод землеройной машины | 1982 |
|
SU1076552A1 |
| Гидравлический привод управленияпЕРЕдВижЕНиЕМ зЕМлЕРОйНОй МАшиНыНЕпРЕРыВНОгО дЕйСТВия | 1979 |
|
SU796332A1 |
| Объемная гидромеханическая передача землеройной машины | 1982 |
|
SU1059093A1 |
| Гидропривод одноковшового экскаватора | 1981 |
|
SU1004551A1 |