(54) ВИНТОВАЯ ПЕРЕДАЧА КАЧЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Универсальный шарнир | 1975 |
|
SU551454A1 |
| ШАРИКОВЫЙ ВИНТОВОЙ МЕХАНИЗМI2 | 1969 |
|
SU427527A3 |
| ШАРИКОВЫЙ ВИНТОВОЙ МЕХАНИЗМ | 1991 |
|
RU2017039C1 |
| Винтовая передача | 1990 |
|
SU1778408A1 |
| БЕСКРИВОШИПНЫЙ ДВИГАТЕЛЬ | 1999 |
|
RU2182241C2 |
| ШАРИКОВАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА (ВАРИАНТЫ) | 2000 |
|
RU2184289C2 |
| БЕСКРИВОШИПНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1996 |
|
RU2115810C1 |
| Шарошечное долото | 1989 |
|
SU1700189A1 |
| ШАРИКОВИНТОВОЙ ПРИВОД | 2001 |
|
RU2225551C2 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО | 1970 |
|
SU261838A1 |
Изобретение относится к машиностроению и может быть использовано в станках и машинах для фиксации подвижных узлов, связанных с передачей винт-гайка качения.
Наиболее близкой но технической сущности к данному изобретению является винтовая передача качения, содержащая винт, охватывающие его гайки, стопорный механизм с приводом поступательного движения, например электромагнитом, расположенным на одной из них, тела качения, размещенные в беговых дорожках винта и гаек 1.
Недостатком указанной передачи явяется невысокая надежность фиксации подижной гайки.
Целью изобретения является повышение адежности фиксации подвижной гайки.
Указанная цель достигается тем, что стопорный механизм выполнен в виде клино: образного толкателя, связанного с приводом поступательного движения, и шариков, диаметр которых меньше диаметра тел качения, размещенных на нерабочем участке винтового канала, взаимодействующих с толкателем.
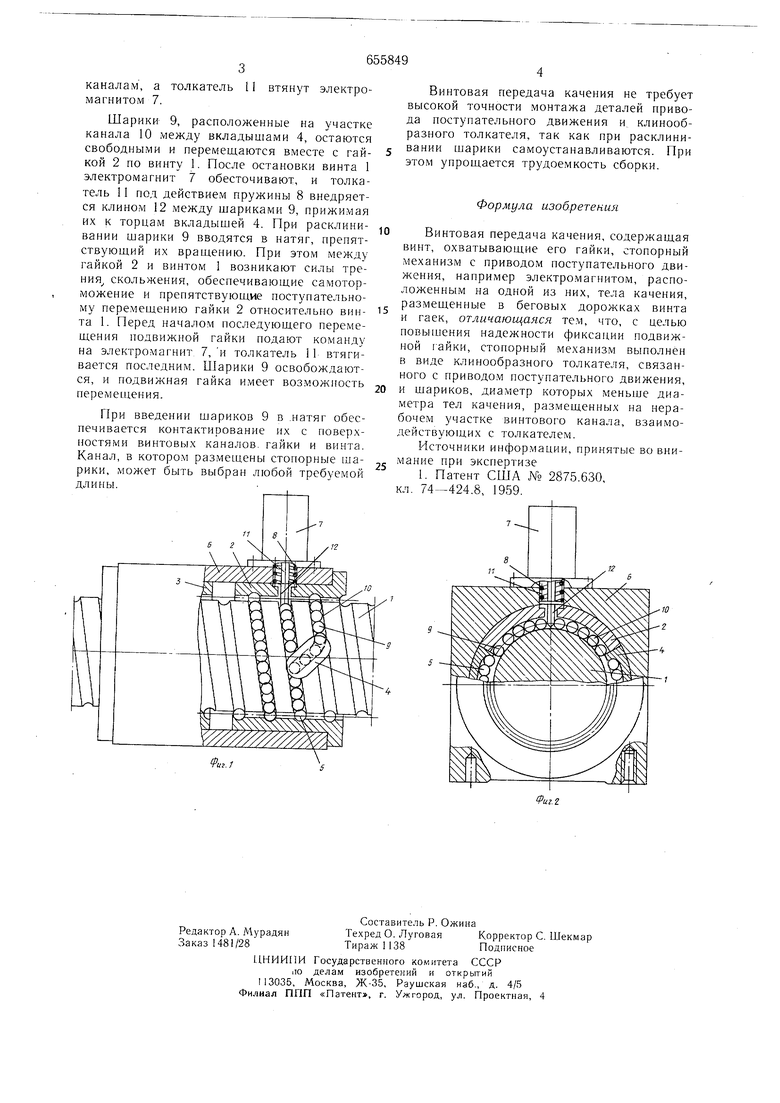
На фиг. 1 изображена винтовая передача качения, продольный разрез; на фиг. 2- винтовая передача качения с частичным разрезом, вид сбоку.
Винтовая передача качения содержит винт 1, охватывающие его гайки 2 и 3, вкладыщи 4 с каналами возврата, тела 5 ка.чения, размещенные в беговых дорожках винта и гаек, корпус 6, стопорный механизм с приводом поступательного движения, например электромагнитом 7, снабженный пружиной 8. Электромагнит 7 установлен на корпусе 6. Стопорный механизм имеет щарики 9, размещенные на нерабочем участке винтового канала 10, и толкатель 11, конец которого выполнен в виде клина 12.
5 Диаметр шариков 9 меньше диаметра тел качения. Толкатель 11 выполнен в виде сердечника электромагнита.
Винтовая передача качения работает следующим образом.
При вращении винта 1 корпус б с гайками 2 и 3 совершает поступательное движение. При этом тела 5 качения передачи циркулируют через вкладыши 4 по винтовым каналам , а толкатель 11 втянут электромагнитом 7. Шарики 9, расположенные на участке канала 10 между вкладышами 4, остаются свободными и пере.,е1даются вместе с гайкой 2 по винту 1. После остановки винта 1 электромагнит 7 обесточивают, и толкатель 11 под действием пружины 8 внедряется клином 12 между шариками 9, прижимая их к торцам вкладышей 4. При расклинивании шарики 9 вводятся в натяг, препятствуюший их врандению. При этом между гайкой 2 и винтом 1 возникают силы трения скольжения, обеспечивающие самоторможение и препятствуюш,ие поступательному перемещению гайки 2 относительно винта 1. Перед началом последующего перемещения подвижной гайки подают команду на электромагнит 7,и толкатель 11 втягивается последним. Шарики 9 освобождаются, и подвижная гайка имеет возможность перемещения. При введении шариков 9 в .натяг обеспечивается контактирование их с поверхностями винтовых каналов, гайки и винта. Канал, в которо.м размещены стопорные шарики, может быть выбран любой требуемой длины. Винтовая передача качения не требует высокой точности монтажа деталей привода поступательного движения и, клинообразного толкателя, так как при расклини«ании шарики самоустанавливаются. При этом упрошается трудоемкость сборки. Формула изобретения Винтовая передача качения, содержаш,ая винт, охватывающие его гайки, стопорный механизм с приводом поступательного движения, например электромагнитом, расположенным на одной из них, тела качения, размещенные в беговых дорожках винта отличающаяся тем, что, с целью повы цения надежности фиксации подвижной гайки, стопорный механизм выполнен в виде клинообразного толкателя, связанного с приводом поступательного движения, и щариков, диаметр которых меньще диаметра тел качения, размещенных на нерабочем участке винтового канала, взаимодействующих с толкателем. Источники инфор.мации, принятые во внимание при экспертизе 1. Патент США № 2875.630, кл. 74-424.8, 1959.
