Изобретение относится к области систем автоматического регулирования и,в частности,может быть использовано в устройствах числового программногсуправления металлорежущими станками.
Известна система цифрового следящего привода перемещения рабочих органов станка, в которой управляющие сигналы по положению и скорости вырабатываются в цифровом виде, что дает ряд преимуиеств, например, высокую точность и стабильность характеристик регулирования по сравнению с аналоговыми следящими приводами l
Однако существующие цифровые приводы имеют ряд недостатков:
-жесткая непереналаживаемая структура регулятора не позволяет получить удовлетворительные динамические характеристики во всем диапазоне скоростей и не позволяет переводить привод из следящего в регулируемый режим, что является необходимым условием при переходе от контурной обработки к позиционированию;
-приводы данного типа не обладают достаточной надежностью вследствие недостаточной защиты силовых тиристоров от сбоев в регуляторе.
Наибглее близким техническим решением к предложенному изобретению является цифровой следящий электропривод, который частично устраняет указанные недостатки, путем введение, систему цифрового блока ограничителя тока .
Он состоит из блока управления, первый и второй выходы которого соеднены соответственно с первым и вторым входами первого сумматора и последовательно соединенные преобразователь код-фаза, блок силовых тиристоров, двигатель, датчик и преобразователь фаза-код, подключенный к третьему входу первого сумматора.
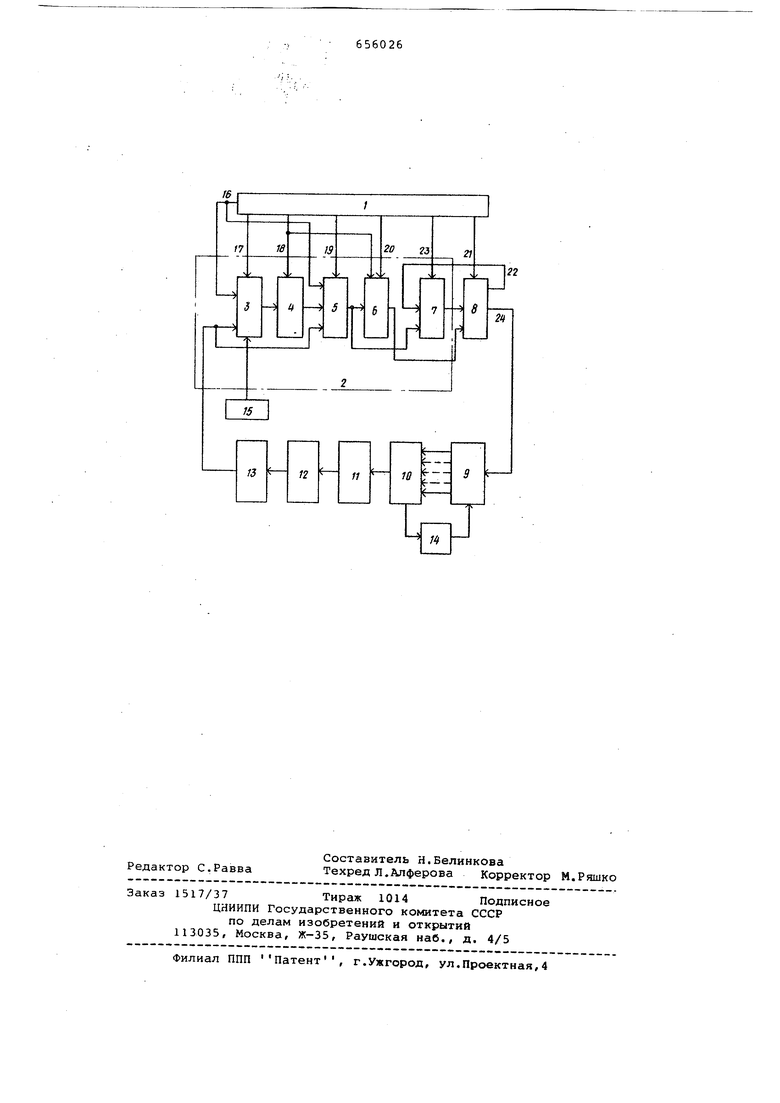
Однако этот привод имеет неудовлетворительные статические и динаиишческие характеристики,что сужает его функциональные возможности и ограничивает область его применения вследствие малого быстродействия электропривода,-нелинейности, присущей двигателю, блоку силовых тиристоров; невозможности перевода из следящего в регулируемый регсим; недостаточной надежности электропривода, так.как в нем отсутствует разделение частот работы цифрового регулятора и преобразователя код-фаза. Целью изобретения является увеличение точности и надежности устройства. Указанная цель достигается тем, что в устройство введены синхронизатор, генератор импульсов и последо (Батально соединенные первый интегратор, второй сумматор, второй интегратор, ограничитель тока и третий сумматор, причем, первый вход первого интегратора соединен с выходом первого сумматора, второй выход блока управления соединен с третьим входом второго сумматора, четвертый вход которого присоединен к третьему входу первого сумматора, к четвер тому входу которого подключен генера тор импульсов, третий вход блока управления соединен со вторыми входа ми первого и второго интеграторов, четвертый выход блока управления соединен со вторым входом второго сумматора, выход которого подключен к третьему входу третьего сумматора, пятый выход блока управления присоед нен к третьему входу второго интегра тора, а шестой и седьмой выходы блок управления подключены соответственно ко вторым входам третьего сумматора и ограничителя тока, выход которого соединен с первым входом преобразова теля код-фаза, второй вход которого через синхронизатор подключен к выхо ду блока силовых тиристоров. Блок-схема цифрового следящего электропривода представлена на черте же. Предлагаемый цифровой следящий электропривод содержит блок управления 1, блок 2, содержащий сугФ аторы 3,5 и 7,интеграторы 4,6,ограничитель тока 8, преобразователь код-фаза 9, блок силовых тиристоров 10, двигатель 11, датчик 12 (например, поворотный трансформатор, индуктосин и т.п.), преобразователь фаза-код 13, синхронизатор 14, генератор импульсов 15« Работает электропривод следующим образом. Цикл вычислений начинается по сиг налу генератора 15. При этом суммато 3 вычисляет величину год.п где Хздд.г - код скорости в п-ом цикле поступающий с выхода 16 блока управленйя 1 г осп ° обратной связи в цикле поступающ1- й с выхода преобразователя 13 и являющийся приращением пути за один цикл вычислений; константа, задаваемая 6ло ком управления с выхода 17, определя щая добротность следящего электропри вода . На выходе интегратора 4 в п-ом цикле вычислений появляется величина гп U2n-i+ J 2-Uin. . где Ugn-i выходная величина интегратора 4 в (n-l)-oM цикле; Kj- константа, задаваемая блоком управления с выхода 18, зависящая от выбранной частоты генератора 15. Сумматор 5 вычисляет величину зп- .п где Kg - константа, задаваемая блоком управления с выхода 19, определяющая мэру компенсации скоростной ошибки привода. Интегратор 6 вычисляет величину U4n (4П-1+ )где tJ4n-i выходная величина интегратора 6 в (n-l)-oM цикле; К4 - константа, задаваемая блоком управления с выхода 20 и определяющая коэффициент усилия инРегрального канала регулятора в скоростном контуре привода. В ограничителе тока 8 Цдп сравнивается с константой иу„р,ду , которая вводится из блока управления с выхода 21 и определяет максимально допустимое напряжение в якорной цепи двигателя. Наименьшая по модулю величина поступает на вход сумг атора 7 с выхода 22 со знаком величины Обозначим величину в канале 23 - . На выходе сумматора 7 образуется сигнал в соответствии с выражением Уупр .04 ,П7 где Kg - константа, задаваемая блоком управления по каналу 23, определяющая коэффициент усилия пропорциональности канала регулятора скоростного контура привода. В ограничителе 8 также сравниваются величины Uynp и Uynp.Mawc-Наименьшая по модулю величина поступает с выхода 24 со знаком Uynp. Синхронизатор 14 формирует импульс один раз за период частоты питания каждого из силовых тиристоров. Преобразователь код-фаза 9 формирует другой импульс, сдвинутый относительно импульса синхронизатора на время, пропорциональное коду, поступающему с выхода 24. Импульсы с выхода преобразователя 9 зажигают поочередно силовые тиристоры привода. Код выхода 24 изменяется с частотой генератора 15, которая может быть ниже частоты импульсов на выходе синхронизатора. Сбой в работе цифрового регулятора, в результате которого не происходит изменения кода с выхода 24, не может jipHBecTH к повреждению тиристоров, так как поступление зажигающих импульсов в этом случае не прекращается.
Предлагаемый следящий электропривод является следящим без компенсации скоростной ошибки, если Кд 0; следящим с компенсацией скоростной ошибки, если Кд 0. Привод переводится в регулируемый режим, если К О и Kjf 0. Если константы К, К не равны нулю, то регулятор скоростного контура является пропорциональноинтегральным. Если К4 О, , го регулятор пропорциональный, если К 0 KfSOf то регулятор интегральный. Изменение коэффициентов Kj, Кг, Кд, К5 приводит к изменению динамических характеристик привода.
Изменяя частоту генератора 15 и соответственно величину К, можно также изменить динамические характеристики привода с одной стороны, а с другой - выбрать приемлемое время загрузки вычислительного комплекса.
Основной технико-экономический эффект от внедрения данного типа цифрового электропривода в устройствах ЧПУ заключается в увеличении скорости быстрого хода rto координатам подач станка без повышения производительнрсти цифрового регулятора, а повышение точности обработки деталей за счет улучшения динамических характеристик к повышения надежности работы привода из-за наличия разделения частот работы регулятора и преобразователя код-фаза.
Формула изобретения
Цифровой следящий электропривод, содержащий блок управления, первый и второй выхода которого соединены соотйетственно с первым и вторым входами первого сумматора и последовательно соединенные преобразователь
код-фаза, блок силовых тиристоров, двигатель, датчик и преобразователь фаза-код, подключенный к третьему входу первого сумматора, отличающийся тем, что, с целью увеличения точности и надежности устройства в него введены синхронизатор, генератор импульсов и последовательно соединенные первый интегратор, второй cytvSMaTop, второй интегратор, ограничитель тока и третий су-глматор, причем первый вход первого интегратора соединен с выходом первого сумматора, второй выход блока управления соединен с третьим входом второго сумматора, четвертый вход которого присоединен к третьему входу первого сумматора, к четвертому вхоКУ которого подключен генератор импульсов, третий выход блока управления соединен со вторыми входами первого и второго интегратороа, четвертый выход блока управления соединен со вторым входом второго сумматора, выход которог® подключен к третьему входу третьего сумматора, пятый выход блока управления присоединен к Третьего входу второго интегратора, а шестой и седьмой выходаа блока управления подключены соответственно ко зторым входам третьего сумматора и ограничителя тока, выход которого соединен с первым входом преобразователя код-Фаза, второй вход которого через синхронизатор подключен к выходу блока силовых тиристоров.
Источники информации, принятые во внимание при экспертизе
1.Патент США 2.244.201,.. кл. G 05 В 19/00, 1965.
2.Авторское .свидетельство СССР №417770, кл. G Q5 В 19/40, 1974.
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой следящий электропривод | 1981 |
|
SU1008703A1 |
| Цифровое устройство для управления тиристорным преобразователем | 1981 |
|
SU949768A1 |
| Устройство для компенсации реактивной мощности | 1986 |
|
SU1347118A1 |
| Устройство для управления током луча электронно-лучевой термической установки | 1980 |
|
SU877801A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРИВОДАМИ АНТЕННОГО ПОСТА РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2015 |
|
RU2587715C1 |
| ФАЗОСДВИГАЮЩЕЕ УСТРОЙСТВО | 2006 |
|
RU2320071C1 |
| Асинхронный следящий привод | 1979 |
|
SU877469A1 |
| Следящий электропривод с синхронным исполнительным двигателем | 2018 |
|
RU2695804C1 |
| Цифровой следящий электропривод | 1985 |
|
SU1308982A1 |
| Устройство для автоматического управления вытяжкой химических нитей | 1986 |
|
SU1414894A1 |