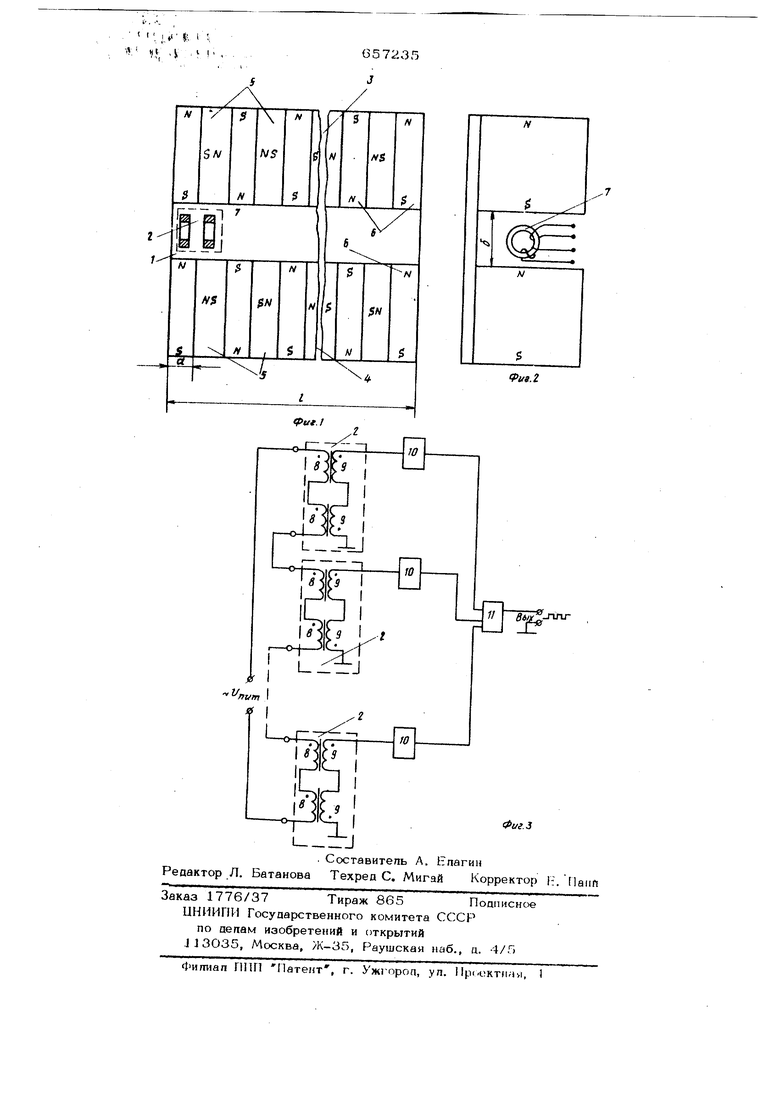
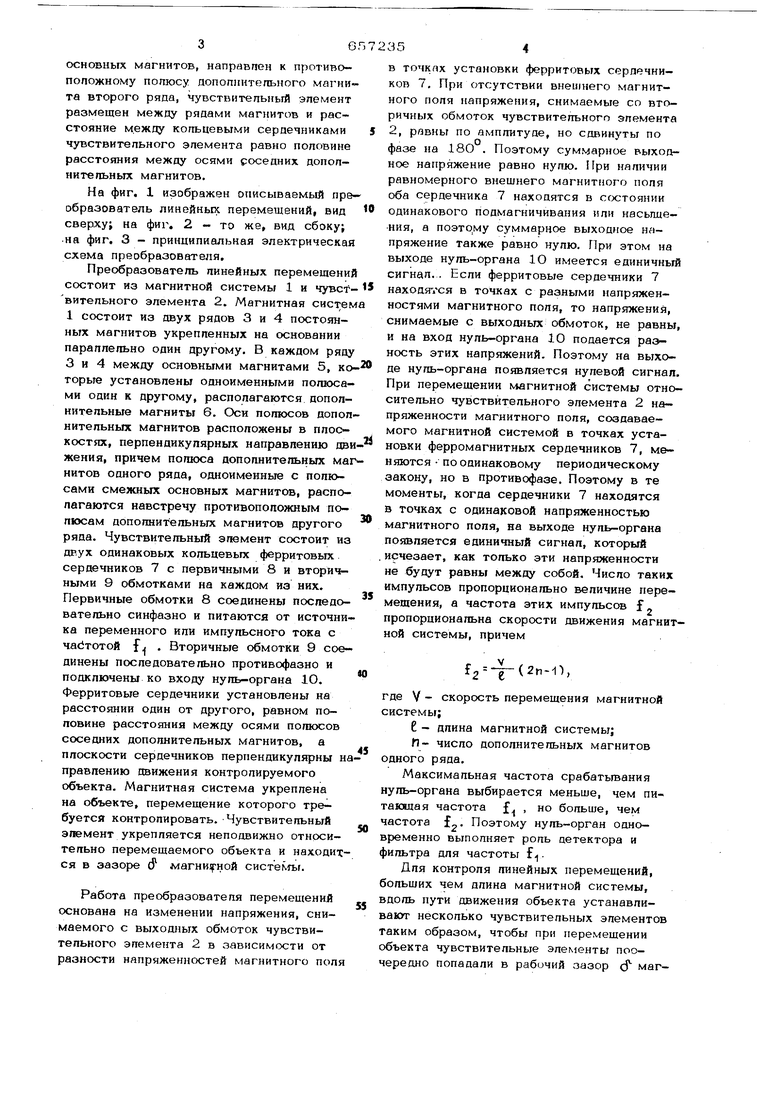
3e основных магнитов, направпеи к противоположному полюсу допопннтепыюго магнита второго ряпа, чувствитепьньгй элемент размещен между рядами магнитов и расстояние между кольцевыми сердечниками чувствительного элемента равно половине расстояния между осями роседних дополнительных магнитов, На фиг, 1 изображен описываемый преобразователь линейных перемещений, вид сверху; на фиг. 2 - то же, вид сбоку; на фиг, 3 - принципиальная электрическая схема преобразователя. Преобразователь линейных перемещений состоит из магнитной системы 1 и чувствитепьного элемента 2. Магнитная систем 1 состоит из двух рядов 3 и 4 nocTosmных магнитов укрепленных на основании параллельно один другому. В каждом ряду 3 и 4 между основными магнитами 5, ко торые установлены одноименными попюса- ми один к другому, располагаются дополнительные магниты 6. Оси полюсов допол нительных магнитов расположены в плоскостях, перпендикулярных направлению дв женин, причем полюса дополнительных ма нитов одного ряда, одноименные с полюсами смежных основных магнитов, располагаются навстречу противоположным полюсам дополнительных магнитов другого ряда. Чувствительный элемент состоит из двух одинаковых кольцевых ферритовых сердечников 7 с первичными 8 и вторичными 9 обмотками на каждом из них. Первичные обмотки 8 соединены последовательно синфазно и питаются от источни ка переменного или импульсного тока с частотой f J . Вторичные обмотки 9 соединены последовательно противофазно и подключены ко входу нуль-органа Ю. Ферритовые сердечники установлены на расстоянии один от другого, равном половине расстояния между осями соседних дополнительных магнитов, а плоскости сердечников перпендикулярны н правлению движения контролируемого объекта. Магнитная система укреплена на объекте, перемещение которого требуется контролировать. Чувствительный элемент укрепляется неподвижно относительно перемещаемого объекта и находится в зазоре cf магнитной системы. Работа преобразователя перемещений основана на изменении напряжения, снимаемого с выходных обмоток чувствительного элемента 2 в зависимости от разности напряженностей магнитного поля в точках установки ферритовых сердечников 7. При отсутствии внешнего магнитного поля напряжения, снимаемые со вторичных обмоток чувствительного элемента 2, равны по амплитуде, но сдвинуты по фазе на 180 . Поэтому суммарное выходное напряжение равно нулю. При наличии равномерного внешнего магнитного поля оба сердечника 7 находятся в сгх;тоянии одинакового подмагничивания или насьлде- ния, а поэтому суммарное выходное напряжение также равно нулю. При этом на выходе нуль-органа 1О имеется единичный сигнал. . Если ферритовые сердечники 7 находя-Ася в точках с разными напряженностями магнитного поля, то напряжения, снимаемые с выходных обмоток, не равны, и на вход нуль-органа 10 подается разность этих напряжений. Поэтому на выходе нуль-органа появляется нулевой сигнал. При перемещении магнитной системы относительно чувствительного элемента 2 напряженности магнитного поля, создаваемого магнитной системой в точках установки ферромагнитных сердечников 7, меняются по одинаковому периодическому закону, но в противофазе. Поэтому в те моменты, когда сердечники 7 находятся в точках с одинаковой напряженностью магнитного поля, на выходе нуль-органа появляется единичный сигнал, который исчезает, как только эти напряженности не будут равны между собой. Число таких импульсов пропорционально величине перемещения, а частота этих импульсов f „ пропорциональна скорости движения магнитной системы, причем (2пИ-), где V - скорость перемещения магнитной системы; С - длина магнитной системы; П- число дополнительных магнитов одного ряда. Максимальная частота срабатьтания нуль-органа выбирается меньше, чем питающая частота f , но больше, чем частота f. Поэтому нуль-орган одновременно выполняет роль детектора и фильтра для частоты f . Для контроля линейных перемещений, больших чем длина магнитной системы, вдоль пути движения объекта устанавливают несколько чувствительных элементов таким образом, чтобы при перемещении объекта чувствительные элементы поочередно попадали в рабочий зазор сГ магнитной системы, Г-асстояние между центрами чувствитепьных эпементов равно е,:е.-|-, гае с( ширина вспомогательного магнита Первичные обмотки всех чувствитепьных эпементов эайнтьтаются от общего источ ника тока с частотой f j , а выходы всех нупь-органов соединены со входами логического эпемента 11, выполняющего функцию И. Тогда с выхода эпемента 11 будем получать информацию о перемещении объекта на расстояние L , причем:, где N -чиспо установленных чувствитепьиы5с эпементов. Вьтопнение магнитной системы 1 пре образователя перемещений в виде двух рядов 3 и 4 постоянных магнитов с основными 5 и допопнитепьными 6 магнита ми пЪзволяет сконцентрировать магнитное попе, так что величина напряженности ма нитного поля в зазоре между полюсами дополнительных магнитов в 1О-12 раз больше, чем напряженность в зазоре меж ду магнитами, оси полюсов которых направлены вдоль направления даижения. Кроме того, изменение напряженности маг нитного поля в зазоре при перемещении от полюса дополнительного магната одног ряда к полюсу дополнительного магнита другого ряда незначительное. Поэтому, при поперечных колебаниях магнитной системы относительно чувствительного элемента, выходной сигнал последнего будет изменяться незначительно. Предлагаемый преобразователь линейного перемещения позволяет по сравнению с известными аналогичными устройствами обеспечить более высокую надежность в работе, поскольку выходной сигнал не зависит от колебаний чувствительного элемента в рабочем зазоре магнитной системы, и обеспечить больший рабочий зазор. Формула изобретения Преобразователь линейных перемещений, содержащий подвижную магнитную систему, состо5адую из ряда постоянных магнитов, установленных одноименными полюсами один к другому, и неподвижный чувствительный элемент в виде двух ферритовых кольцевых сердечников с обмотками, о тпичаюшийся тем, что, с целью повышения надежности, магнитная система снабжена вторым рядом идентичных постоянных магнитов, установленных паралпепь- но первому, и между смежными магнитами каждого ряда установлены дополнительные постоянные магниты таким образом, что полюс дополнительного магнита, одноименный с полюсами смежных основных магнитов, направлен к протицопопожному полюсу допот1итепьного магнита второго ряда, чувствительный элемент., размещен между рядами магнитов и расстояние между Кольцевыми сердечниками чувствительного эпемента равно половине расстояния между осями сосеЬних дополнительных магнитов. Источники информг.ции, принятые во внимание при экспертизе 1.Агейкин Д. И. и др. Датчики контроля и регулирования , М., изд-во Машиностроение 1965 с. 199-2ОО. 2.Авторское свидетельство СССР Ns317091, кл. G О8 С 9/О4. 02ЛО.69.
;,. . (it ,1 .11.
ч J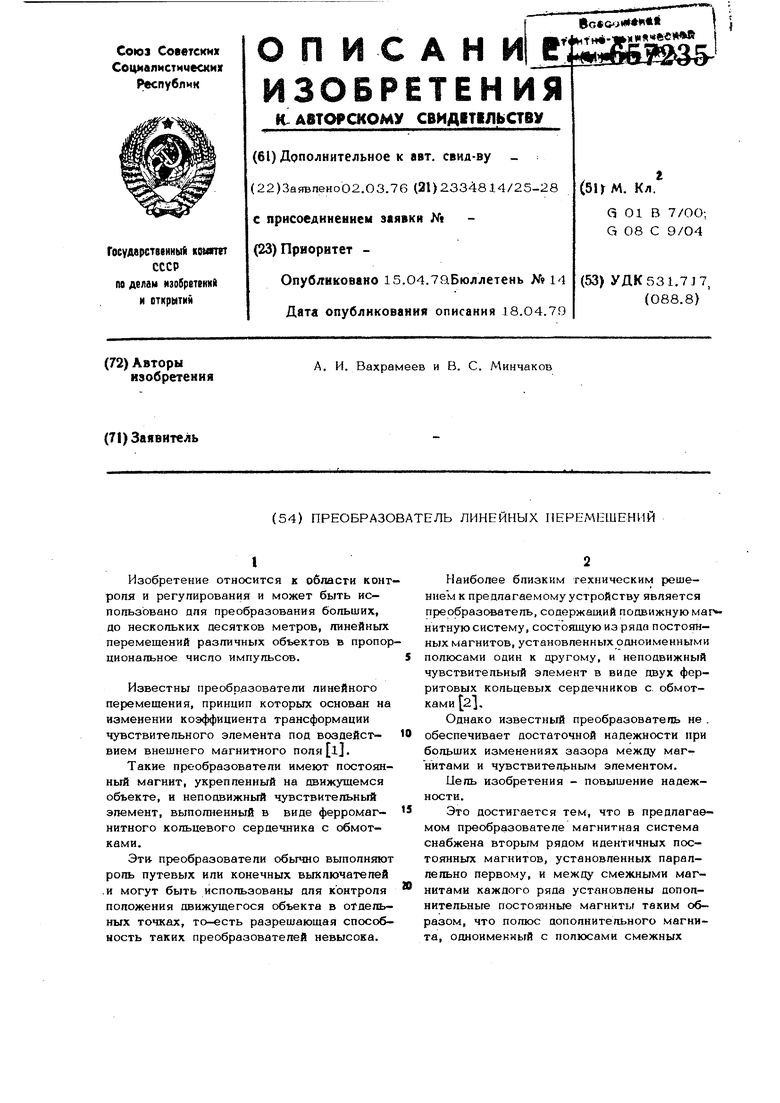
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМАГНИТНЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЯ | 1991 |
|
RU2019787C1 |
| ДАТЧИК ИНДУЦИРОВАННЫХ МАГНИТНЫХ ПОЛЕЙ (ВАРИАНТЫ) | 1993 |
|
RU2075757C1 |
| ДИНАМИЧЕСКИЙ СПОСОБ ИЗМЕРЕНИЯ ВИБРОУСКОРЕНИЯ И ДАТЧИК ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2023 |
|
RU2834759C1 |
| Система автоматического регулирования генератора постоянного тока | 2017 |
|
RU2676662C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЧИСЛА ОБОРОТОВ ВАЛА ЗАБОЙНОГО ДВИГАТЕЛЯ | 2004 |
|
RU2285120C2 |
| Вентильный электродвигатель | 1983 |
|
SU1141527A1 |
| Электродинамический сейсмоприемник | 1979 |
|
SU855580A1 |
| Вентильный электродвигатель | 1982 |
|
SU1062829A1 |
| КОМНАТНАЯ МАГНИТНАЯ АНТЕННА | 1992 |
|
RU2097882C1 |
| ДАТЧИК УСИЛИЯ | 2001 |
|
RU2193762C1 |