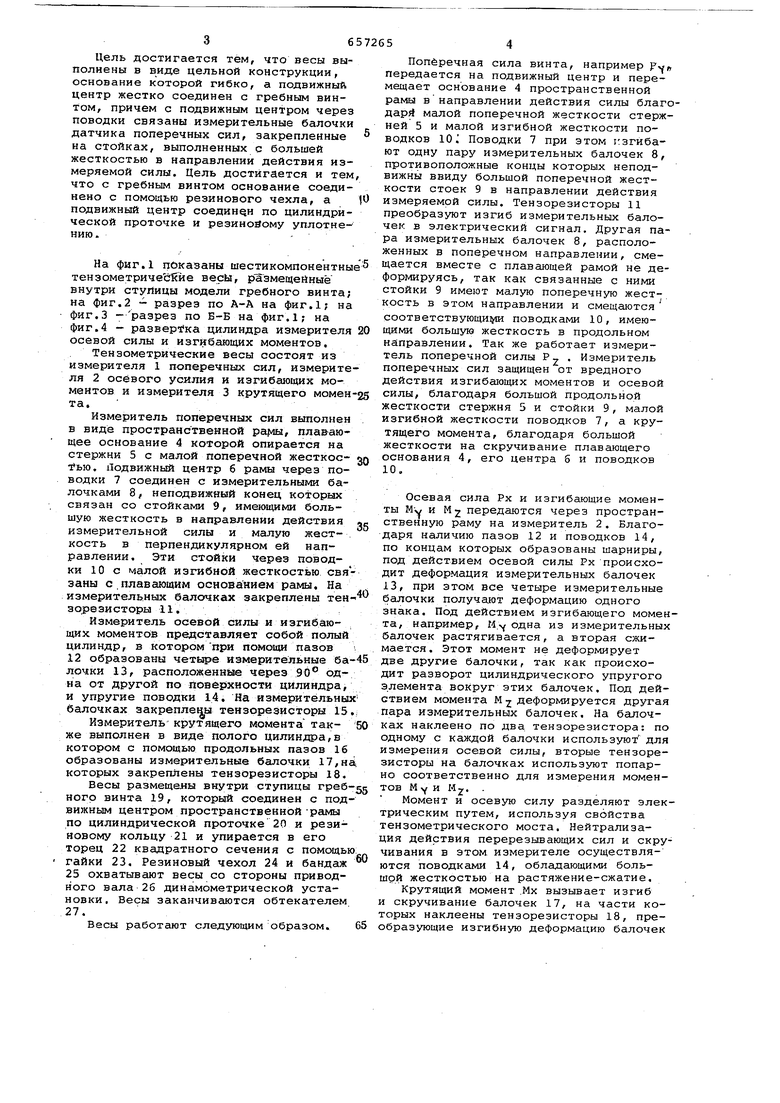
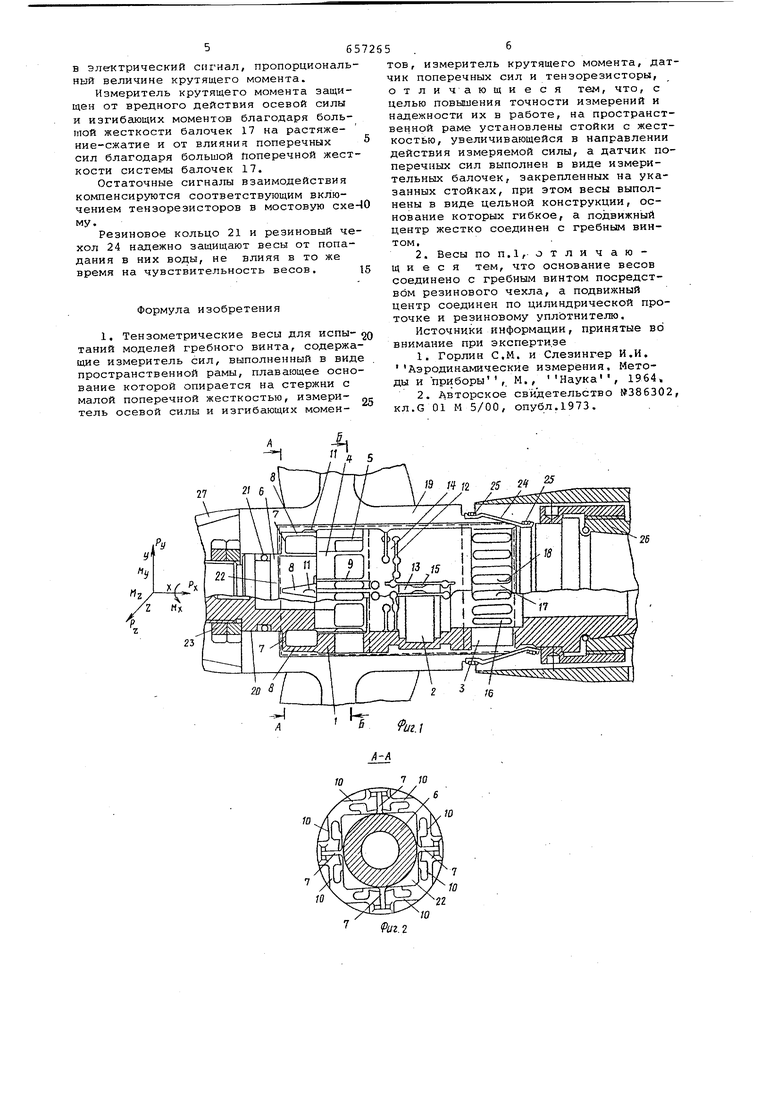
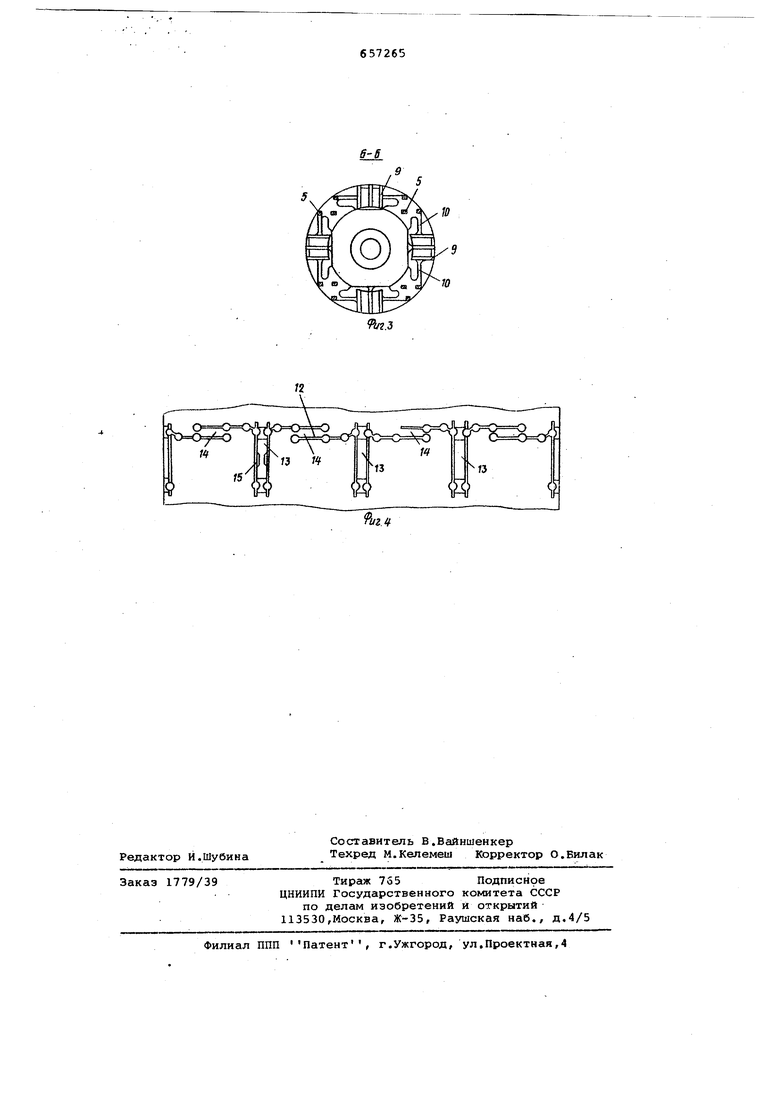
Цель достигается тем, что весы выполнены в виде цельной конструкции, основание которой гибко, а подвижный центр жестко соединен с гребным винтом, причем с подвижным центром через поводки связаны измерительные балочки датчика поперечных сил, закрепленные на стойках, выполненных с большей жесткостью в направлении действия измеряемой силы. Цель достигается и тем что с гребным винтом основание соединено с помощью резинового чехла, а подвижный центр соединен по цилиндрической проточке и резиновому уплотнению.На фиг.1 показаны шестикомпонентны тензометричесгййе весЫ, р змещейныё внутри ступицы модели гребного винта; на фиг.2 - разрез по А-А на фиг.1; на фиг.З -разрез по Б-Б на фиг.1; на фиг.4 - развер1 ка цилиндра измерителя осевой силы и изгибающих моментов. Тензометрические весы состоят из измерителя I поперечных сил, измерите ля 2 осевого усилия и изгибающих моментов и измерителя 3 крутящего момен та. Измеритель поперечных сил выполнен в виде пространственной pajviH, плавающее основание 4 которой опирается на стержни 5 с малой поперечной жесткое1 ью, Подвижный центр б рамы через поводки 7 соединен с измерительными балочками 8, неподвижный конец которых связан со стойками 9, имеющими большую жесткость в направлении действия измерительной силы и малую жесткость в перпендикулярном ей направлении. Эти стойки через поводки 10 с малой изгибной жесткостью свя заны с.плавающим основанием рамы. На измерительных балочках закреплены тен зорезисторы 11. Измеритель осевой силы и изгибающих моментов представляет собой полый цилиндр, в которомпри помощи пазов 12 образованы четвд е измерительные ба лочки 13, расположенные через 90 одна от другой по поверхности цилиндра, и упругие поводки 14. На измерительны балочках закреплены тензорезисторы 15 Измеритель крутящего момента также выполнен в виде полого цилиндра,в котором с помощью продольных пазов 16 образованы измерительные балочки 17,н которых закреплены тензорезисторы 18. Весы размёщеяы внутри ступицы греб ногр винта 19, который соединен с под вижным центром пространственнойрамы по цилиндрической проточке 20 и резиновому кольцу 21 и упирается в его торец 22 квадратного сечения с помощь гайки 23. Резиновый чехол 24 и бандаж 25 охватывают весы со стороны приводного вала 26 динамометрической установки. Весы заканчиваются обтекателем 27. Весы работают следующим образом. Поперечная сила винта, например Ру передается на подвижный центр и перемещает основание 4 пространственной рамы внаправлении действия силы благодари малой поперечной жесткости стержней 5 и малой изгибной жесткости поводков 10; Поводки 7 при зтом изгибают одну пару измерительных балочек 8, противоположные концы которых неподвижны ввиду большой поперечной жесткости стоек 9 в направлении действия измеряемой силы. Тензорезисторы 11 преобразуют изгиб измерительньах балочек в электрический сигнал. Другая пара измерительных балочек 8, расположенных в поперечном направлении, смещается вместе с плавающей рамой не деформируясь, так как связанные с ними стойки 9 имеют малую поперечную жесткость в этом направлении и смещаются соответствующи1у1и поводками 10, имеющими большую жесткость в продольном направлении. Так же работает измеритель поперечной силы Р . Измеритель поперечных сил защищен от вредного действия изгибающих моментов и осевой силы, благодаря большой продольной жесткости стержня 5 и стойки 9, малой изгибной жесткости поводков 7, а крутящего момента, благодаря большой жесткости на скручивание плавающего основания 4, его центра 6 и поводков 10, Осевая сила Рх и изгибающие моменты My и М передаются через пространственную раму на измеритель 2. Благодаря наличию пазов 12 и поводков 14, по концам которых образованы шарниры, под действием осевой силы Рх происходит деформация измерительных балочек 13, при этом все четыре измерительные балочки получают деформацию одного знака. Под действием изгибающего момента, например, М. одна из измерительных балочек растягивается, а вторая сжимается. Этот момент не деформирует две другие балочки, так как происходит разворот цилиндрического упругого элемента вокруг этих балочек. Под действием момента М деформируется другая пара измерительных балочек. На балочках наклеено по два тензорезистора: по одному с каждой балочки используют для измерения осевой силы, вторые тензорезисторы на балочках используют попарно соответственно для измерения моментов М Y и М. . Момент и осевую силу разделяют электрическим путем, используя свойства тензометрического моста. Нейтрализация действия перерезывающих сил и скручивания в этом измерителе осуществляются поводками 14, обладающими большой жесткостью на растяжение-сжатие. Крутящий момент .Мх вызывает изгиб и скручивание балочек 17, на части которых наклеены тензорезисторы 18, преобразующие изгибную деформацию балочек 6 в Электрический сигнал, пропорциональ ный величине крутящего момента. Измеритель крутящего момента защищен от вредного действия осевой силы и изгибающих моментов благодаря большой жесткости балочек 17 на растяжение-сжатие и от влияния поперечных сил благодаря большой Поперечной жест кости системы балочек 17. Остаточные сигналы взаимодействия компенсируются соответствующим включением тензорезисторов в мостовую схе му. Резиновое кольцо 21 и резиновый че хол 24 надежно защищают весы от попадания в них воды, не влияя в то же время на чувствительность весов. Формула изобретения 1, Тензометрические весы для испытаний моделей гребного винта, содержа щие измеритель сил, выполненный в вид пространственной рамы, плавающее осно вание которой опирается на стержни с малой поперечной жесткостью, измеритель осевой силы и изгибающих моментов, измеритель крутящего момента, датчик поперечных сил и тензорезисторы, отличающиеся тем, что, с целью повышения точности измерений и надежности их в работе, на пространственной раме установлены стойки с жесткостью, увеличивающейся в направлении действия измеряемой силы, а датчик поперечных сил выполнен в виде измерительных балочек, закрепленных на указанных стойках, при этом весы выполнены в виде цельной конструкции, основание которых гибкое, а подвижный центр жестко соединен с гребным винтом, 2. Весы поп.1,отли ч аю щ и е с я тем, что основание весов соединено с гребным винтом посредством резинового чехла, а подвижный центр соединен по цилиндрической проточке и резиновому уплотнителю. Источники информации, принятые во внимание при эксперти.зе 1.Горлин С,М. и Слезингер И,И, Аэродинамические измерения. Методы и приборы , М., Наука, 1964, 2.Авторское свидетельство №386302, кл.С 01 М 5/00, опубл.1973.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШЕСТИКОМПОНЕНТНЫЕ ТЕНЗОМЕТРИЧЕСКИЕ ВНУТРИМОДЕЛЬНЫЕ ВЕСЫ ДЛЯ ИСПЫТАНИЙ ГРЕБНОГО | 1973 |
|
SU386302A1 |
| Тензорезисторный динамометр осевой силы и крутящего момента | 1974 |
|
SU579548A1 |
| Измерительный преобразовательКРуТящЕгО MOMEHTA гРЕбНОгО ВиНТА | 1979 |
|
SU845025A1 |
| Датчик измерения усилий, действующих на модель гребного винта | 1976 |
|
SU588476A1 |
| УЗЕЛ БУРОВОГО СТЕНДА | 1992 |
|
RU2021461C1 |
| ЭЛЕКТРОННЫЕ ТЕНЗОВЕСЫ | 1993 |
|
RU2044283C1 |
| ДАТЧИК УСИЛИЙ ДЛЯ ТЕНЗОМЕТРИЧЕСКИХ ВЕСОВ | 1997 |
|
RU2114405C1 |
| ДАТЧИК ДЛЯ ТЕНЗОМЕТРИЧЕСКИХ ВЕСОВ | 1995 |
|
RU2111464C1 |
| ДАТЧИК ДАВЛЕНИЯ | 1995 |
|
RU2082128C1 |
| ДАТЧИК ДЛЯ ТЕНЗОМЕТРИЧЕСКИХ ВЕСОВ | 1994 |
|
RU2082122C1 |
10
й/г.2
W
