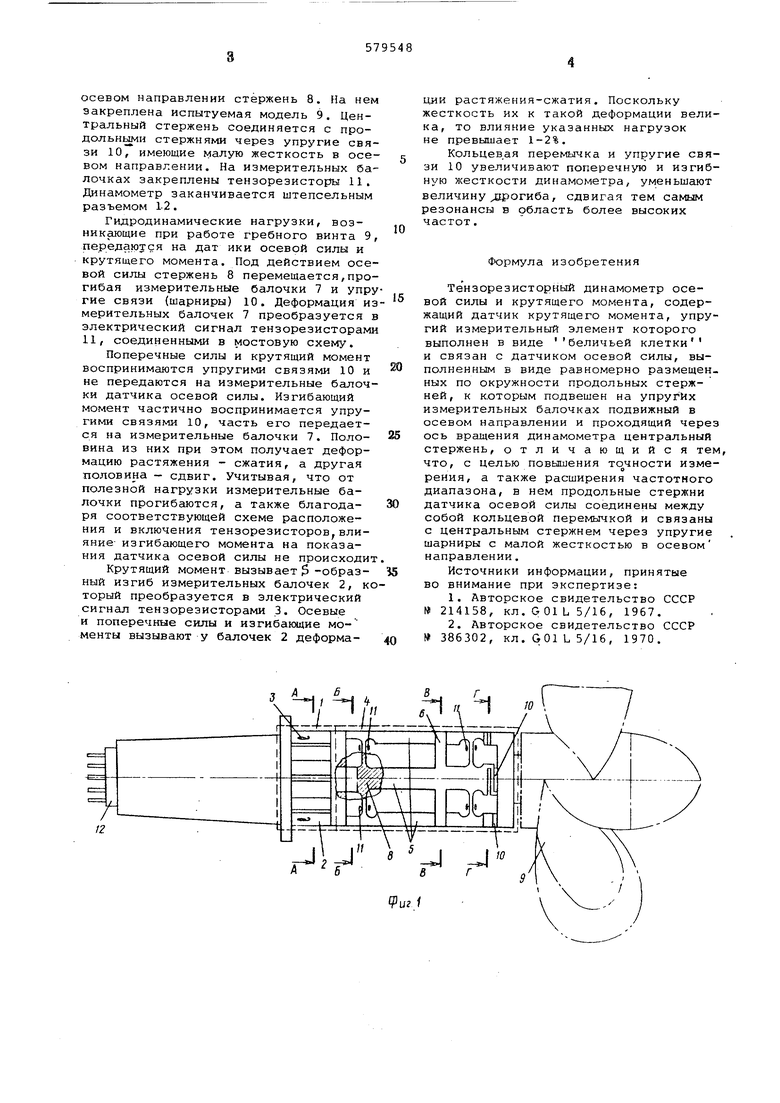
Изобретение относится к измерительной технике и может быть использовано при измерении аэро- и гидродинамических характеристик моделей гребного винта, роторов турбин, вентиляторов и т.п. Известен динамометр дня измерения осевой силы крутящего момента, содер жащий смонтированные на сборном Всшу узлы измерения осевой силы и крутяще го момента l . Недостатком известного динамометр является влияние неизмеряемых компонент нагрузки на результаты измерений . Известен также динамометр для измерения осевой .силы и крутящего моме та, содержащий датчик крутящего момента, упругий измерительный элемент беличьей которого выполнен в виде клетки и связан с датчиком осевой силы, выполненным в виде равномерно размещенных по окружности продольны стержней, к которым подвешен на упругих измерительных балочках подвиж ный в осевом направлении и проходящий Через ось вращения динамометра центральный стержень 2 . Недостатком этого динамометра яв ляется то, что он также не защитен от вредного воздействия неизмеряемых компонент и имеет динамические помехи с частотой вращения вала. Целью настоящего изобретения является повьшение точности измерения и расширение частотного диапазона. Указанная цель достигается за счет того, что в предлагаемом динамометре продольные стержни датчика осевой силы соединены между собой кольцевой перемычкой и связаны с центральным стержнем через упругие шарниры с малой жесткостью в осевом направлении. На фиг. 1 изображен предлагаемый динамометр, общий вид; на фиг, 2 - разрез А-А фиг. 1; на фиг. 3 - разрез Б-Б фиг. 1; на фиг. 4 - разрез В-В фиг. 1; на фиг. 5 - разрез Г-Г фиг. 1. Динамометр состоит иэ последовательно соединен нь4х датчика 1 крутящего момента с упругим злементом типа беличьей клетки , включающим измеительные Салочки 2 прямоугольного сечения с тензорезисторами 3, и датчика 4 осевой силы. Датчик осевой силы выполнен в виде равномерно раамещенных по окружности продольных стержней 5,соединенных между собой пер-емычкой 6.К стержням 5 на упругих и-: мерительных баипочках 7 подвешен подвн -ыя в осевом направлении стержень 8. На нем закреплена испытуемая модель 9. Центральный стержень соединяется с продольными стержнями через упругие связи 10, имеющие малую жесткость в осевом направлении. На измерительных балочках закреплены тенэорезисторы 11. Динамометр заканчивается штепсельным разъемом 1.2. Гидродинамические нагрузки, возникающие при работе гребного винта 9 передаются на дат ики осевой силы и крутящего момента. Под действием осевой силы стержень 8 перемещается,прогибая измерительные балочки 7 и упру гие связи (шарниры) 10. Деформация из мерительных балочек 7 преобразуется в электрический сигнал тензорезисторами 11, соединенными в мостовую схему. Поперечные силы и крутящий момент воспринимаются упругими связями 10 и не передаются на измерительные балочки датчика осевой силы. Изгибающий момент частично воспринимается упругими связями 10, часть его передается на измерительные балочки 7. Половина из них при этом получает деформацию растяжения - сжатия, а другая половина - сдвиг. Учитывая, что от полезной нагрузки измерительные балочки прогибаются, а также благодаря соответствующей схеме расположения и включения тензорезисторов,влияние- изгибающего момента на показания датчика осевой силы не происходит Крутящий момент вызывает 3-образный изгиб измерительных балочек 2, ко торый преобразуется в электрический сигнал тензорезисторами 3. Осевые и поперечные силы и изгибающие моменты вызывают у балочек 2 деформации растяжения-сжатия. Поскольку есткость их к такой деформации велика, то влияние указанных нагрузок не превышает 1-2%. Кольцев.ая перемычка и упругие связи 10 увеличивают поперечную и изгибную жесткости динамометра, уменьшают величину ДЕрогиба, сдвигая тем самым езонансы в область более высоких частот. Формула изобретения Тензорезисторный динамометр осевой силы и крутящего момента, содержащий датчик крутящего момента, упругий измерительный элемент которого выполнен в виде беличьей клетки и связан с датчиком осевой силы, выполненным в виде равномерно размещен, ных по окружности продольных стержней, к которым подвешен на упругИх измерительных балочках подвижный в осевом направлении и проходящий через ось вращения динамометра центральный стержень, отличающийся тем, что, с целью повЕлшения тсзчности измерения, а также расширения частотного диапазона, в нем продольные стержни датчика осевой силы соединены между собой кольцевой перемычкой и связаны с центральным стержнем через упругие шарниры с малой жесткостью в осевом направлении. Источники информации, принятые во внимание при экспертизе: 1.Авторское свидетельство СССР № 214158, кл.О01Ь5/16, 1967. 2.Авторское свидетельство СССР 386302, кл.&01Ь5/16, 1970.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШЕСТИКОМПОНЕНТНЫЕ ТЕНЗОМЕТРИЧЕСКИЕ ВНУТРИМОДЕЛЬНЫЕ ВЕСЫ ДЛЯ ИСПЫТАНИЙ ГРЕБНОГО | 1973 |
|
SU386302A1 |
| Тензометрические весы для испытания моделей грибного винта | 1976 |
|
SU657265A1 |
| Преобразователь силы в электрический сигнал | 1976 |
|
SU661276A1 |
| УЗЕЛ БУРОВОГО СТЕНДА | 1992 |
|
RU2021461C1 |
| Мессдоза | 1987 |
|
SU1500886A1 |
| ДАТЧИК УСИЛИЙ ДЛЯ ТЕНЗОМЕТРИЧЕСКИХ ВЕСОВ | 1997 |
|
RU2114405C1 |
| ДАТЧИК ДЛЯ ТЕНЗОМЕТРИЧЕСКИХ ВЕСОВ | 1995 |
|
RU2111464C1 |
| Датчик измерения усилий, действующих на модель гребного винта | 1976 |
|
SU588476A1 |
| ДИНАМОМЕТР ДЛЯ ИЗМЕРЕНИЯ УСИЛИЙ НА МОДЕЛИ ГРЕБНОГО ВИНТА РЕГУЛИРУЕМОГО ШАГА | 1995 |
|
RU2104505C1 |
| Многокомпонентный динамометр | 1981 |
|
SU1015318A1 |

C 4IliJilv ч - 11-г-|- иа , , ,, . ...,L..,. iTt vr J J
Vvt г
г-г
в-в
Фт. 4
ш f
