Изобретение относится к области силоизмерительной техники. Датчик может быть использован, например, в аэро- и гидродинамических лабораториях.
Известны, датчики для измерения усилий, измеряющие суммарные силовые нагрузки, возникающие при работе гребного винта .
Наиболее близким по технической сущности к предлагаемому датчику является датчик для измерения усилий, содержащий два силовоспринимающих элемента, измеритель сил упора с тензорезисторами, выполненный в виде двух изогнутых плоских пружин, и измеритель изгибающего момента с тензорезисторами, связанный через упругие шарниры с одним силовоспринимающим элементом, прикрепленным к ступице лопастей гребного винта и соединенным через упругий щарнир с другим силовоспринимающим элементом, связанным с гребным валом 5.
Известные датчики не обеспечивают требуемой точности измерения упора и момента лопасти и возможности измерения окружной силы.
Целью изобретения является повыщение точности измерения упора и изгибающего момента лопасти и обеспечение возможности измерения окружной силы. Это достигается в предлагаемом датчике для измерения усилий.
содержащем два силовоспринимающпх элемента, измеритель силы упора и измеритель изгибающего момента с тензорезисторами, связанный через упругие щарниры с одним
силовоспринимающим элементом, прикрепленным к ступице лопастей гребного винта и соединенным через упругий щарнир с другим силовоспринимающим элементом, связанным с гребным валом, тем, что измеритель силы
упора в нем выполнен в виде упругих параллельных балочек квадратного поперечного сечения, расположенных перпендикулярно оси вращения гребного винта и жестко прикрепленных одними концами к второму силовоспринимающему элементу, а другими концами к гребному валу.
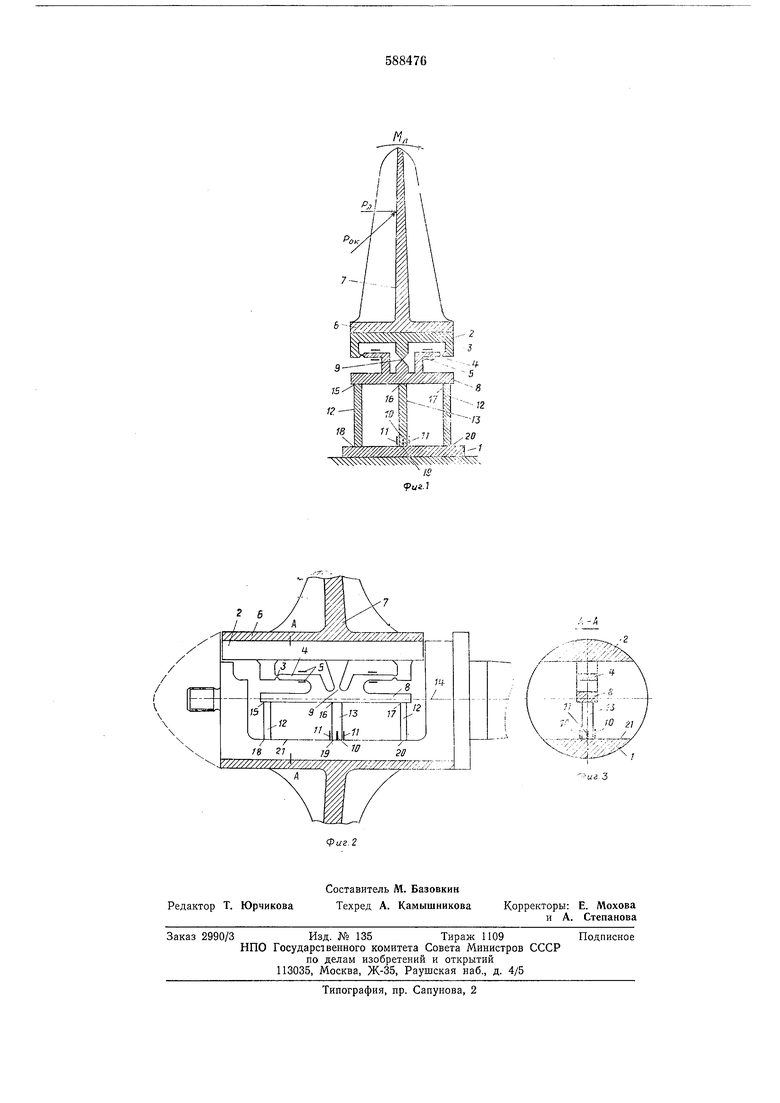
На фиг. 1 изображена кинематическая схема датчика с силами и моментом, действующими на лопасть гребного винта; на фиг. 2-
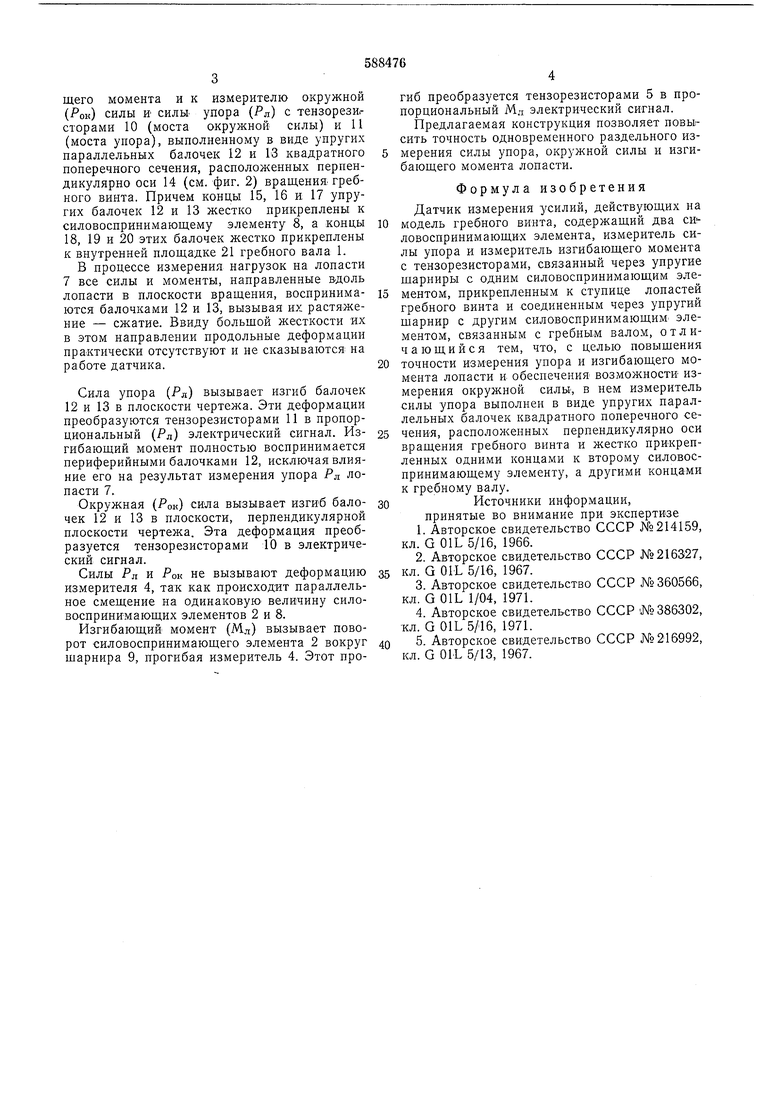
тот же датчик, продольный разрез; на фиг. 3 показано сечение А-А на фиг. 2.
Датчик содержит гребной вал 1, на котором смонтированы силовосприннмающий элемент 2, связанный через упругие щарниры 3 с
измерителем 4 изгибающего момента (Мл) с тензорезисторами 5 и прикрепленный к ступице 6 лопастей 7, и силовоспринимающий элемент 8, соединенный через упругий щарнир 9 с силовоспринимающим элементом 2 и жестко прикрепленный к измерителю 4 изгибающего момента и к измерителю окружной (Рок) СИЛЫ И СИЛЫ упора (Рл) с тензорезиг сторами 10 (моста окружной силы) и 11 (моста упора), выполненному в виде упругих параллельных балочек 12 и 13 квадратного поперечного сечения, расположенных перпендикулярно оси 14 (см. фиг. 2) вращения: гребного винта. Причем концы 15, 16 и 17 упругих балочек 12 и 13 жестко прикреплены к силовоспринимающ.ему элементу 8, а концы 18, 19 и 20 этих балочек жестко прикреплены к внутренней площадке 21 гребного вала 1.
В процессе измерения нагрузок на лопасти 7 все силы и моменты, направленные вдоль лопасти в плоскости вращения, воспринимаются балочками 12 и 13, вызывая их растяжение - сжатие. Ввиду больщой жесткости их в этом направлении продольные деформации практически отсутствуют и не сказываются на работе датчика.
Сила упора (Рл) вызывает изгиб балочек 12 и 13 в плоскости чертежа. Эти деформации преобразуются тензорезисторами И в пропорциональный (Рл) электрический сигнал. Изгибающий момент полностью воспринимается периферийными балочками 12, исключая влияние его на результат измерения упора Рл лопасти 7.
Окружная (Рок) сила вызывает изгиб балочек 12 и 13 в плоскости, перпендикулярной плоскости чертежа. Эта деформация преобразуется тензорезисторами 10 в электрический сигнал.
Силы РЛ и РОК не вызывают деформацию измерителя 4, так как происходит нараллельное смещение на одинаковую величину силовоспринимающих элементов 2 и 8.
Изгибающий момент (Мл) вызывает поворот силовоспринимающего элемента 2 вокруг щарнира 9, прогибая измеритель 4. Этот прогиб преобразуется тензорезисторами 5 в пропорциональный Мл электрический сигнал.
Предлагаемая конструкция позволяет повысить точность одновременного раздельного измерения силы упора, окружной силы и изгибающего момента лопасти.
Формула изобретения
Датчик измерения усилий, действующих на модель гребного винта, содержащий два си:ловоспринимающих элемента, измеритель силы упора и измеритель изгибающего момента с тензорезисторами, связанный через упругие щарпиры с одним силовоспринимающим элементом, прикрепленным к ступице лопастей гребного винта и соединенным через упругий шарнир с другим силовоспринимающиМ элементом, связанным с гребным валом, отличающийся тем, что, с целью повыщения точности измерения упора и изгибающего лопасти и обеспечения возможности измерения окружной силы, в нем измеритель силы упора выполнен в виде упругих параллельных балочек квадратного поперечного сечения, расположенных перпендикулярно оси вращения гребного винта и жестко прикрепленных одними концами к второму силовоспринимающему элементу, а другими концами к гребному валу.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР №214159, кл. G OIL 5/16, 1966.
2.Авторское свидетельство СССР №216327, кл. Q OIL 5/16, 1967.
3.Авторское свидетельство СССР № 360566, кл. G OIL 1/04, 1971.
4.Авторское свидетельство СССР №386302, кл. G OIL 5/16, 1971.
5.Авторское свидетельство СССР №216992, кл. G OIL 5/13, 1967.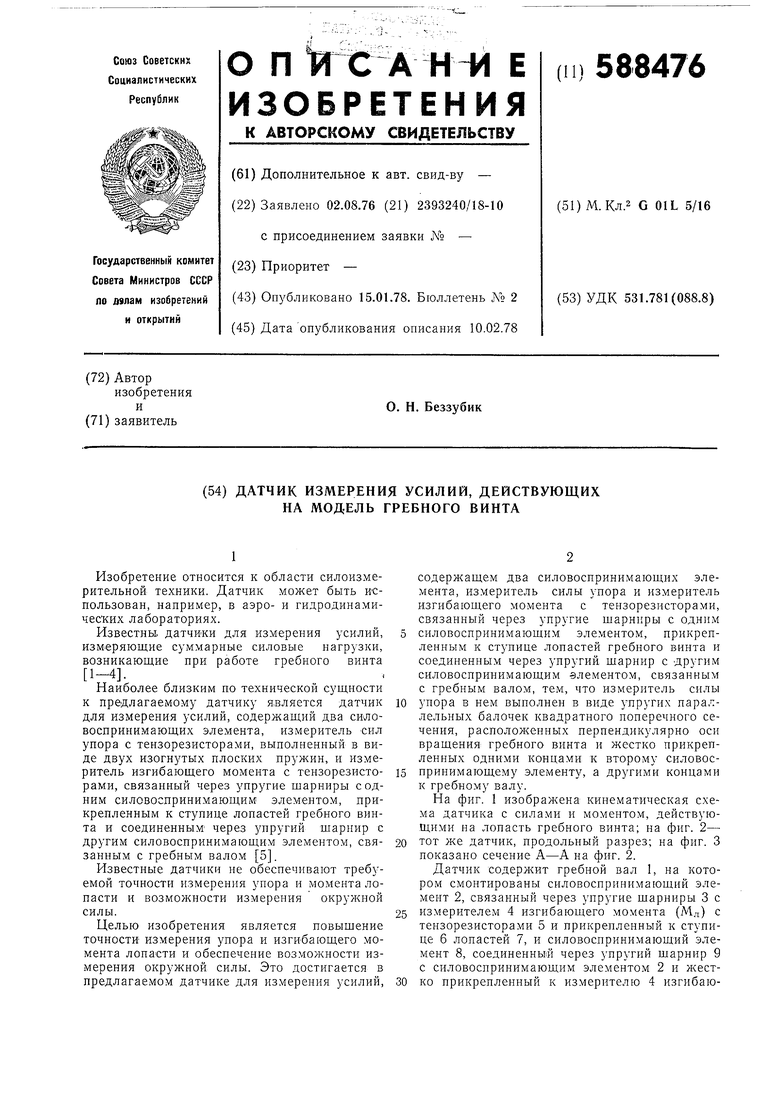
| название | год | авторы | номер документа |
|---|---|---|---|
| Тензометрические весы для испытания моделей грибного винта | 1976 |
|
SU657265A1 |
| Тензорезисторный динамометр осевой силы и крутящего момента | 1974 |
|
SU579548A1 |
| ШЕСТИКОМПОНЕНТНЫЕ ТЕНЗОМЕТРИЧЕСКИЕ ВНУТРИМОДЕЛЬНЫЕ ВЕСЫ ДЛЯ ИСПЫТАНИЙ ГРЕБНОГО | 1973 |
|
SU386302A1 |
| Динамометр для измерения усилий на модели гребного винта | 1982 |
|
SU1054690A1 |
| ДИНАМОМЕТР ДЛЯ ИЗМЕРЕНИЯ НЕСТАЦИОНАРНЫХ НАГРУЗОК НА МОДЕЛИ ГРЕБНОГО ВИНТА | 1972 |
|
SU360566A1 |
| Измерительный преобразовательКРуТящЕгО MOMEHTA гРЕбНОгО ВиНТА | 1979 |
|
SU845025A1 |
| ДИНАМИЧЕСКИЙ ПОДШИПНИКОВЫЙ УЗЕЛ | 1989 |
|
RU2008130C1 |
| Устройство для определения усилия затяжки резьбового соединения | 1976 |
|
SU580467A1 |
| ДАТЧИК ДЛЯ ТЕНЗОМЕТРИЧЕСКИХ ВЕСОВ | 1995 |
|
RU2111464C1 |
| ЭЛЕКТРОННЫЕ ТЕНЗОВЕСЫ | 1993 |
|
RU2044283C1 |