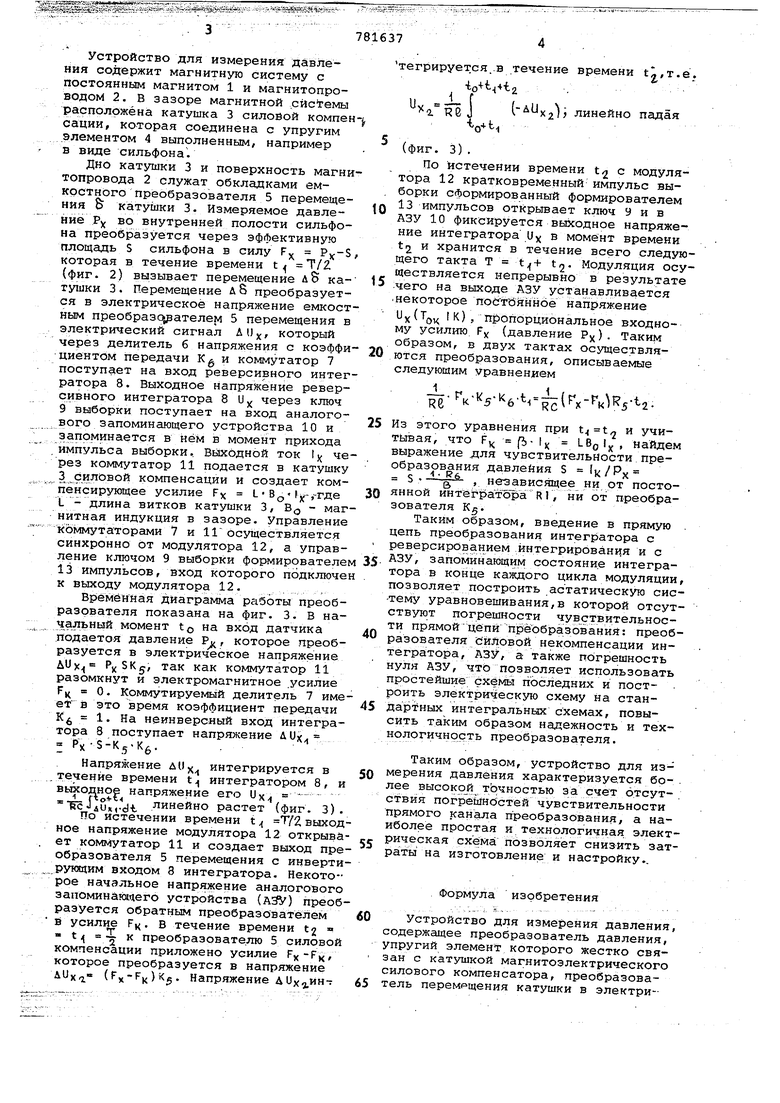
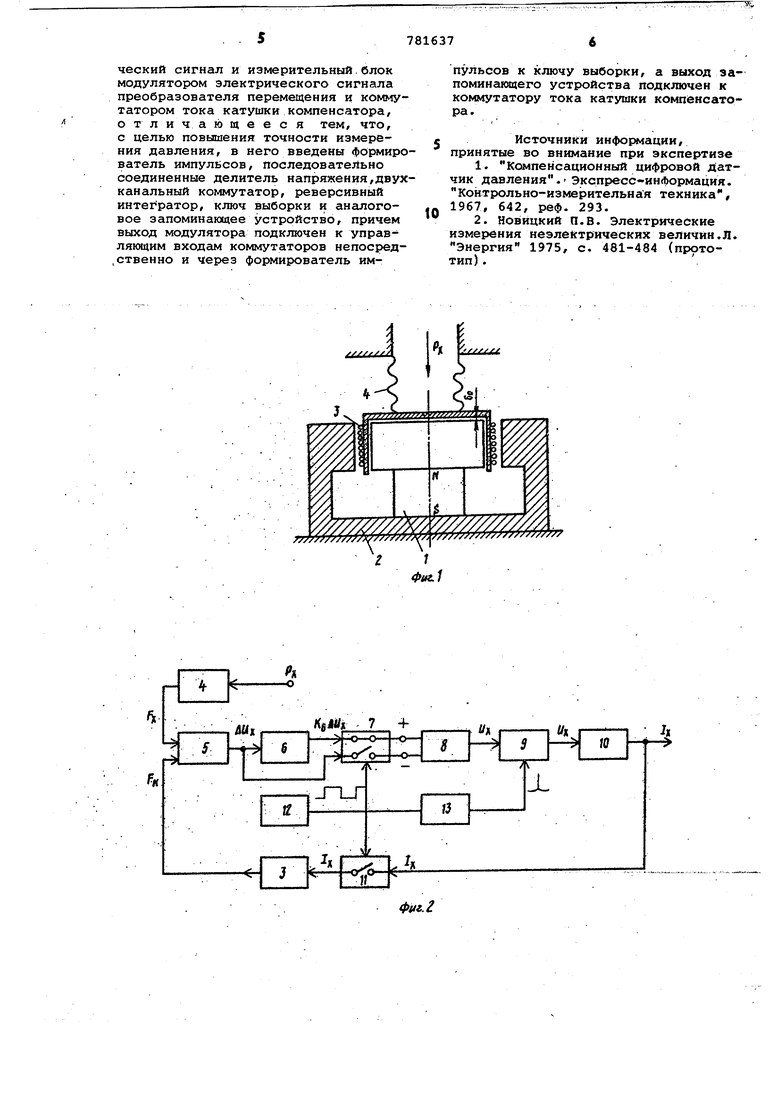
Устройство для измерения давления содержит магнитную систему с постоянным магнитом 1 и магнитопроводом 2. В зазоре магнитной сйсТемы расположёна катушка 3 силовой компенсации, которая соединена с упругим .элементом 4 выполненным/ например в виде сильфона.
Дно катушки 3 и поверхность магнитопровода 2 служат обкладками емкостного преобразователя 5 перемещения & катушки 3. Измеряемое давление Ру во внутренней полости сильфона преобразуется через эффективную площадь S сильфоНа в силу Р, которая в течение времени t Т/2 (фиг. 2) вызывает перемещение до катушки 3. Перемещение Д 8 преобразуется в электрическое напряжение емкостным преобразс ателем 5 перемещения в электрический сигнал AU который через делитель 6 напряжения с коэффициентом передачи К и коммутатор 7 поступает на вход реверсивного интегратора 8. Выходное напряжение реверсивного интегратора 8 и, через ключ 9 выборки поступает на вход аналогового запоминающего устройства 10 и запоминается в нём в момент прихода импульса выборки. Выходной ток через коммутатор 11 подается в катушку 3. силовой компенсации и создает компенсирующее усилие FX L ,,-,-где L - длина витков катушки 3, В - магнитная индукция в зазоре. Управление коммутаторами 7 и 11 осуществляется синхронно от модулятора 12, а управление ключом 9 выборки формирователем 13 импульсов, вход которого подключен
к выходу модулятора 12. .
Временная диаграмма рс1боты преобразователя показана на фиг. 3. В начальный момент to на вход датчика подается давление Р, которое преобразуется в электрическое напряжение
дКх коммутатор 11 разомкнут и электромагнитное .усилие FH 0. Коммутируемь1й делитель 7 имееТ в это :время коэффициент передачи К 1. На неинверсный вход интегратора 8 поступает напряжение uUx РХ-З-КЗ-К.
Напряжение ДИ интегрируется в течение времени t интегратором 8, и выходное напряжение его DX йсJiutc d-t линейно растет (фиг. 3).
По истечении времени t 72 выходное напряжение модулятора 12 открывает коммутатор 11 и создает выход преобразователя 5 перемещения с инвертирукхцим входом 3 интегратора. Некото-рое начальное напрясжение аналогового запоминакхцего устройства (АЗУ) преобразуется обратным преобразователем в усилие Рц. В течение времени t t к преобразовате.лю 5 силовой компенсации приложено усилие которое преобразуется в напряжение
AUxi ( 5 Напряжение AUx-j.
тегрируется.в течение времени
to-(-t.j4t2
f
и
RE ) линейно
Vti
(фиг. 3).
По истечении времени t с модулятора 12 кратковременный импульс вы, борки сформированный формирователем
13 импульсов открывает ключ 9 и в АЗУ 10 фиксируется выходное напряжение интегратора DX в момент времени tj и хранится в течение всего следующего такта Т tg. Модуляция осуществляется непрерывно в результате
5 :чего на выходе АЗУ устанавливается некоторое посгтбйннбё напряжение UX(TQ I к), пропорциональное входному усилию FX (давление Р). Таким образом, в двух тактах осуществляются преобразования, описываемые следующим уравнением
RC
5 Из этого уравнения при и учитывая, что FX к х Найдем выражение для чувствительности преобразования давления S ( S - , независящее ни от постоянной HHTQirpaTolJa R1, ни от преобразователя
Таким образом, введение в прямую . цепь преобразования интегратора с реверсированием интегрирования и с
. АЗУ, запоминающим состояние интегратора в конце каждого цикла модуляции, позволяет построить астатическую сис-тему уравновешивания,в которой отсутствуют погрешности чувствительности прямойЦепи преобразования: преобразователя сйловой некомпенсации интегратора, АЗУ, а также погрешность нуля АЗУ, что позволяет использовать простейшие скёмь последних и построить электрическую схему на стан5 дарТных интегральных схемах, повысить таким образом надежность и технологичность преобразователя.
Таким образом, устройство для изQ мерения давления характеризуется бо- . лее высокой точностью за счет отсутствия погрешностей чувствительности прямого канала преобразования, а наиболее простая и технологичная электt рическая схема позволяет снизить затраты на изготовление и настройку..
Формула изобретения
Устройство для измерения давления, содержащее преобразователь давления, упругий элемент которого жестко связан с катушкой магнитоэлектрического силового компенсатора, преобразователь перемещения катушки в электри-ческий сигнал и измерительный.блок модулятором электрического сигнала преобразователя перемещения и коммутатором тока катушки компенсатора, отличающееся тем, что, с целью повьлаения точности измерения давления, в него введены формирователь импульсов, последовательно соединенные делитель напряжения,двухканальный коммутатор, реверсивный интегратор, ключ выборки и аналоговое запоминающее устройство, причем выход модулятора подключен к управляющим входам коммутаторов непосред.ственно и через формирователь импульсов к ключу выборки, а выход эапоминакяцего устройства подключен к коммутатору тока катушки компенсатоTpSi
Источники информации, принятые во внимание при экспертизе
1.Компенсационный цифровой Датчик давления.. Экспресс-информация.
контрольно-измерительная техника. 1967, 642, реф. 293.
2.Новицкий П.В. Электрические измерения неэлейтрических величин.л. Энергия 1975, с. 481-484 (прототип) .
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь давления | 1979 |
|
SU970149A1 |
| Преобразователь напряжения в частоту | 1978 |
|
SU758509A1 |
| Цифровой синтезатор частоты с частотной модуляцией | 1989 |
|
SU1771068A1 |
| Электромагнитные весы | 1986 |
|
SU1337671A1 |
| Магнитоэлектрический динамометр | 1984 |
|
SU1174790A1 |
| Устройство для регистрации сигналов | 1986 |
|
SU1323856A1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ИЗМЕРИТЕЛЬ УГЛОВОЙ СКОРОСТИ | 2012 |
|
RU2497077C1 |
| Силовой компенсатор весов | 1985 |
|
SU1303838A1 |
| Способ преобразования угла поворота вала в код и устройство для его осуществления | 1989 |
|
SU1713103A1 |
| Функциональный преобразователь | 1980 |
|
SU920766A1 |

Фиг. 2
