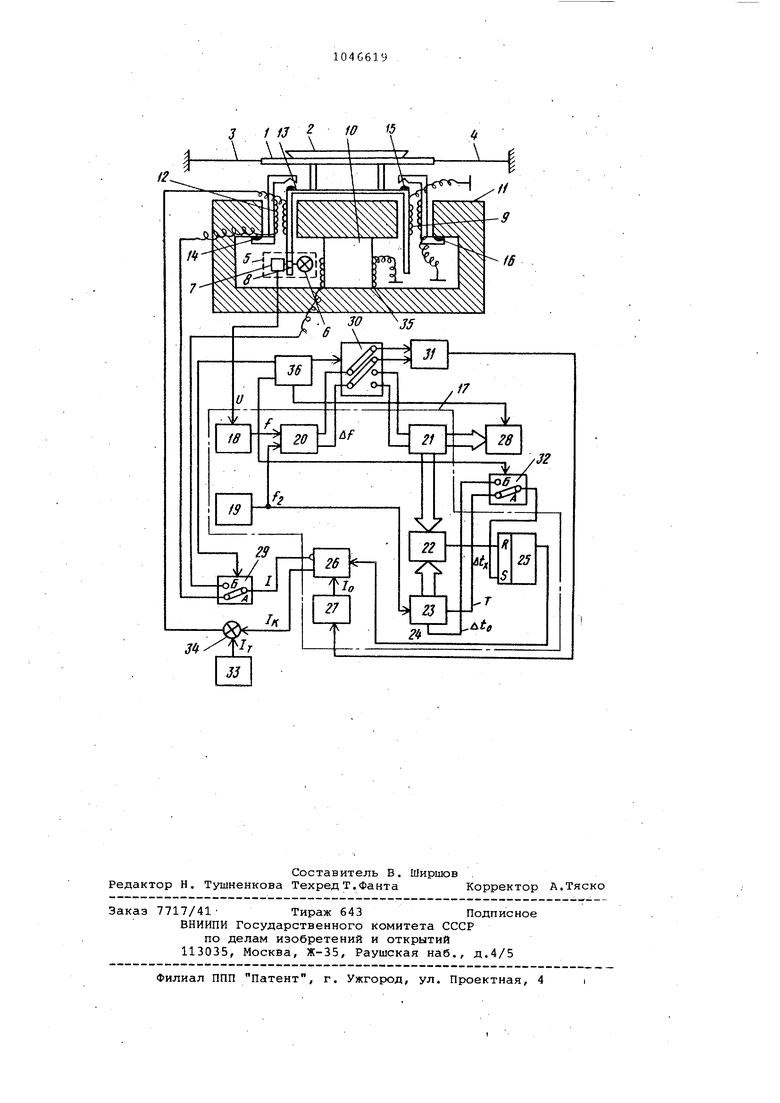
Изобретение относится к весоизмерительной технике, в частности к весам, в которых уравновешивание дости гается с помощью электромагнитных сил. Известны электромагнитные -цифровы весы, содержащие чувствительный элемент с грузоподъемным устройством, систему подвески, магнитоэлектрический преобразователь, эталонную катуш .ку заданной массы, командный блок, устройство электромагнитного наложения эталонной катушки, преобразователь Некомпенсации и электрическую систему уравновешивания 1 . В известных весах повышение точности достигается путем проведения калибровки устройства перед началом измерения, однако условие обязательного отсутствия измеряемого груза на грузоподемном устройстве в режиме калибровки и осуществления калибровки вручную не позволяет использовать весы подобного типа при непрерывном измерении массы (без снятия груза в течение длительного времени - взвеши вание потока вещества для на автоматизированных линиях, измерение массы при физико-химическом анализе }. Наиболее близким к изобретению по технической сущности являются весы с электромагнитным уравновешиванием содержащие чувствительный элемент с грузоподемной площадкой, с системой подвесок и с измерительной катушкой расположенной в зазоре магнитопрово.да и подключенной через сумматор к источнику тока, расположенную в том же зазоре магнитопровода эталонную катушку, подключенную к первому выходу первого переключателя, управляю щий вход которого и управляющий вход коммутатора соединены с командным блоком, отсчетный прибор, запоминающий блок и систему электрической компенсации в виде опорного и управляемого датчиком некомпенсации генераторов, подключенных к вычитателю частот, реверсивного счетчика, выход которого подключены к отсчетному прибору, и подключенного к опорному генератору циклического счетчика. кодовые выходы которых подключены к схеме сравнения кодов, фазового компаратора, выход которого подключен к управляющему входу токового ключа информационный вход которого через -стабилизатор соединен с выходом запоминающего блока, а пряМой выход - с сумматором С23. Недостаток известного устройства заключается -в том, что при длительно измерении массы происходит снижение точности измерения, связанное с пол ной невозможностью проведения автоматической калибровки весов при наличии измеряемого груза на грузопод емной чашке. Целью изобретения - повышение точности за счет обеспечения возможности установки нуля в процессе длительного измерения массы. Поставленная цель достигается тем, что в весы с электромагнитным уравновешиванием, содержащие чувствительный элемент с грузоподемной площадкой, с системой подвесок и с измерительной катушкой, расположенной в зазоре магнитопровода и подключенной через сумматор к источнику тока, расположенную в том же зазоре магнитопровода эталонную катушку, подключенную к первому выходу первого переключателя, управляющий вход которого и управляющий вход коммутатора соединены с командным блоком, отсчетный прибор, запоминающий блок и систему электрической компенсации в виде опорного и управляемого датчиком некомпенсации генераторов, подключенных к вычитателю частот, реверсивного счетчика, выходы которого подключены к отсчетному прибору, и подключенного к опорному генератору циклического счетчика, кодовые выходы которых подключены к схеме сравнения кодов, фазового компаратора, выход которого подключен к управляющему входу токового ключа, информационный вход которого через стабилизатор соединен с выходом запоминающего блока, а прямой выход - с сумматором, введен второй переключатель, причем информационные входы второго переключателя соединены с выходом вычитат.еля частот, управляющий вход подключен к командному блоку, одна пара выходов второго переключателя подключена к входам запоминающего блока, а другая - к входам реверсивного счетчика выходы циклического счетчика подключены к входам коммутатора, выход которого соединен с одним входом компаратора, другой вход которого подключен к схеме сравнения кодов, а управляющий вход отсчетного прибора прдключен к командному блоку. Кроме того, с целью повышения точности за счет обеспечения стабильного температурного режима магнитной системы, в них введена дополнительная катушка, подключенная через первый переключатель к инверсному выходу токового ключа, причем измерительная, эталонная и дополнительная катушки выполнены с равными сопротивлениями. На чертеже показана структурная схема весов. Весы содержат чувствительный элемент 1 с грузоподемной площадкой 2, растяжки 3 и 4, преобразователь (датчик ) 5 некомпенсации, выполненный в виде источника 6 света, фотоприемника 7, щелевой диафрагмы 8, выполненной в каркасе измерительной катушки 9, постоянный магнит 10, магиитопровод 11, эталонную катушку 12 известной массы, систему механически ограничителей хода, состоящую из упо ров 13 - 16, систему 17 электрическо компенсации, состоящую из управляемо го генератора 18, опорного генератора 19, вычитателя 20 частот, реверсивного счетчика 21, схемы 22 совпадения кодов, циклического счетчика 23 с промежуточным выходом 24, импульс, на котором появляется в соетоянии счетчика, отстоящем на определенное число NP от состояния, в котором выдается импульс переполнения, фазового компаратора 25, токового ключа 26 с прямым и инверсивным выходом,управляющий вход которого соединен с выходом фазового компаратора, стабилизатора 27 тока, отсчетного прибора 28, первый переключател 29, второй переключатель 30,. запоминающйй блок 31, логический коммутатор 32, источник 33 тока та-ры, сумматор 34 токов, дополнительную катушку 35, командный блок 36. Конструктивно чувствительный- элемент 1, грузоподемная площадка 2 и измерительная катушка 9 жестко скреп лены друг с другом и закреплены на растяжках 3 и 4, образуя подвижную часть весов. Работа весов основана на компенсации веса груза Р электромагнитной силой F Ру m g. F В „ 3„ 4t,/T ,с/1сГ где m - измеряемая масса; g - ускорение свободного падений В - индукция в зазоре постоянног магнита 10; . 3j, -ток стабилизатора 27; ut -длительность импульса тока Т - период импульсной последовательности , определяемый отношением емкости циклического счетчика 23 к частоте 2 опорного генератора 19; Np - показания реверсивного счетчика 21; 10 - емкость циклического счетчика 23. Весы работают следующим образом. Предварительно при сборке и регулировке весов масса гпд катушки 12 подгоняется до достижения равенства gSg Njj, где Sp - номинальная чувm ствительность весов Пе.ред началом измерения, в исходной позиции, при отсутствии измеряемого груза на грузоподъемной площащке 2, т.е. при Р 0,командный блок 36 ставит переключатель 29 и коммута тор 32 в положение А, а переключател 30 переводит в нижнее положение, соединяя выходы вычитателя 20 частот с входами реверсивного счетчика 21, От регулируемого вручную источника 33 тока тары через сумматор 34 токов в измерительную катушку 9 подается ток т начального тарирования, компенсирующий вес подвижной части весов, вес тары и дрейф нуля. При этом щелевая диафрагма 8 находится в нулевом положении, сигналы с выходов преобразователя 5 некомпенсации, вычитателя 20 частот, реверсивного, счетчика 21 равны нулю. На отсчетном приборе. 28 устанавливаются нулевые показания. . В катушку 12 через переключатель 29 и инверсный выход токового ключа 26 поступает ток JQ стабилизатора 27 тока. Катушка 12 находится в крайнем верхнем положении, поджатая к упорам 14 и 16 усилием FP ВРдЗц Рд m,,g, где РО - длина привода в катушке а2; Рд - вес катушки 12. В отличие от известного устройства в данном случае не требуется дополнительный источ-ник тока .для создания усилия Fчто. позволяет упростить конструкцию весов, а также обеспечить постоянный тепловой режим магнитной системы. После уравновешивания тары, веса подвижной части и коррекции дрейфа нудя по с.игналу Калибровка командный блок 36 переводит переключатель 29 и коммутатор 32 в положение Б и ставит переключатель 30 в верхнее положение, блокируя при этом реверсивный счетчик 21. Обесточенная катушка 12 под действием собственного веса РО опускается на упоры 13 и 15. Таким образом, на чувствительный элемент 1 подается калибровочное усилие PQ. Одновременно с подачей Р на выходе фазового компаратора 25, благодаря переключению коммутатора 32, появляются импульсы с относитель ной длительностью Atp/T N /ю. Это приводит к созданию компенсирующего усилия F}, , где в и Jg - соответственно индукция в зазоре .магнитной системы и ток стабилизатора тока на момент проведения калибровки. 31 JHOM где при В В BHOM ном - значения В и 3 , соответствующие номинальной чувствительности, выработанное компенсирующее усилие Подвижная часть весов остается в нулевом положении, состояние запоминающего блока изменяется. При этом исключаются переходные процессы уравновешивания веса РО, имеющие место в известном устройстве, тем самым быстрюдействие прибора повышается. При наличии погрешности чувствительности (Ffi РО ) f которая может быть вызвана нестабильностью В, J или наклоном весов, что равносильио изменению составляющей ускорения силы тяжести по оси чувствительности, подвижная часть весов смещается от .
нейтрального положения. На выходе преобразователя 5 некомпенсации появляется сигнал, знак которого зависит от погрешности чувствительности. Генераторы 18 и 19 рассогласовываются, и на выходах вычитателя 20 частот появляется сигнал разностной частоты -af . Подсчет импульсов разностной частоты осуществляется в запоминающем блоке 31, который регулирует величину тока JQ стабилизатора 27 до установления равенства
Po-- o()fi ) И)
где лр- - Изменение составляющей ускорения силы тяжести по оси чувствительности;
AD - приращение тока стабилизатора 27 тока в процессе калибровки прибора. Подвижная часть возвращается в исходное состояние, что свидетельствует об окончании калибровки. Величина тока стабилизатора 27 в конце такта калибровки равна
э; л;±лэ т(±д)( (.2)
По окончании калибровки командный блок 36 переводит переключатель 30 в нижнее положение, а логический коммутатор 32 и переключатель 29 ставит в положение А. При этом происходит.блокировка запоминающего блока 31 и снимаетоя блокировка с реверсивного
.счетчика 21. Катушка 12 занимает крайнее положение. Весы подготовлены к измерению.
При установлении груза с измеряемой массой т, на площадку 2 подвижная часть весов смещается вниз, на . выходе преобразователя 5. появляется сигнал рассогласования U , зависимый от РХ ()/ генераторы 18 и 19 рассогласовываются, на выходах
.вычитателя 20 появляется сигнал разностной частоты й- , реверсивный счетчик 21 считает импульсы., пришедшие за время процесса уравновешивания. По мере pocTai числа импульсов в реверсивном счетчике 21 увеличивается время пребывания фазового компаратора 25 в единичном состоянии определяемое разностью между моментами поступления на Него импульсов переполнения циклического счетчика 23 через логичес.кий коммутатор 32 и им пульсов с выхода схемы 22 совпадения кодов. Это приводит к увеличению длительности л± и росту компенсирующего тока Ojj : .Процесс изменения тока Л„ продолжается до тех пор,пока вырабатываемое компенсирующее усилие
F,j не уравновесит Р. После уравновешивания подвижная часть весов возвращается в исходное состояние, райность на выходах вычитателя 20 часто
становится равной нулю, и реверсивный, счетчик 21 останавливается, запоминая набранную кодовую комбинацию
Nx /r)«X/BPn OK ( I
Подставляя значение 0 из (2) в (3), получаем
,.. 5г.
(). результат, не зависимый от погрешности чувствительности.
Особенность весов заключается в возможности осуществления последующих калибровок прибора без снятия груза с грузоприемной площадки. Исходя из возможной Скорости изменения погрешности чувствительности, командному блоку 36 задаются частоты калиб- ровок.
Пусть в реверсивном счетчике 21 к. моменту проведения калибровки запишется кодовая комбинация
N()r. (s ±jsJ,
X
где Л5 и j-dS/Sp - соответственно абсолютная и относительная погрешность чувствительности к моменту проведения калибровок, вызванная изменением В, Эд и й в процес-се измерения т. Калибровка, осуществляемая по сигналу с командного блока 36, аналогична описанной выше калибровке без груза т на грузоподемной площадке 2. Отличие состоит в том, что в режиме калибровки помимо калибровочного усилия PQ на чувствительный «элемент 1 действует сила Р. Длительность единичного импульса фазового компаратора 25 определяется как
()/T-(x)°. что приводит к созданию компенсирующего усилия Fp (N|,+NoJ-ro , где В и ,J - значения- В и JQ на момент проведения калибровки.
Из-за наличия погрешности чувствительности j выработанное усилие
( ) что- приводит к смещению подвижной части весов от нейтрального положения, рассогласованию генераторов 18 и 19. Запоминающе устройство 31 начинает -изменять ток стабилизатора 27 тока до тех пор, пока не выработается компенсирующее усилие Ррк возвращающее подвижную часть весов в нейтральное положение. Это свидетельствует о вьшолнении равенства
f)(V)/-° K %) ; () (4)
Величина тока стабилизатора 27 к моменту окончания калибровки имеет вид
У -h.)-K-%)(
. ° К)
Следует отметить, что, если , т.е Nj SQ m состояние . запоминающего блока 31 в режиме калибровки не изменится.
При последующем изменении в реверсивном счетчике 21 запишется код
,, (
(Ь)
т
хк
о rt
Подставляя значение тока ( в (6), получим
N -(-)К)п NX
; XK-%)(i).
-.. .
K:ScC %/5o% -)%/(%/v)Относительная погрешности чувствительности после калибровки имеет
вид и ,} I
..,,(
J
Из (7) видно, что эффективность проведения калибровок зависит от соотношения измеряемой и образцовой массы. Так, при m,m(,, неполная коррекция J может быть учтена при выборе частоты калибровок. В случае необходимости повЕЛшения точности измерения можно по сигналу командного блока проводить серию калибровок, в этом случае на время проведения калибровок гасится индикация отсчетного прибора и разрешается только в. конце последнего такта. Относительная погрешность чувствительности за п тактов калибровки имеет
Ггп / /т, П j (ij).
Так,прк
вид
1го/ % а .
tn mp по окончании второй калибровки ° окончании третьей jj j /в и т.д. .
Предлагаемое выполнение -весов позволяет существенно повысить точность измерения путем полной автома тизации режима калибровки безразлично кхарактеру взвешивания (как при разовых, так и при долговременных ,взвешиваниях ), что значительно расши ряет функциональные возможности весов-. В известном устройстве автоматизация проведения калибровки возмож5,на лишь для разовых взвешиваний,где легко найти время для Ксшибровки - в моменты отсутствия г-руза на грузоприемной площадкеJ. Кроме того, в известном устройстве условием правильности калибровки является предва.рительная коррекция аддитивной погрешности, в предлагаемом же устройстве результат калибровки не зависит от. аддитивной погрешности.
В предлагаемых весах в паузах действия импульса тока в измеритель,ной катушке 9 ток стабилизатора 27 тока протекает либо в эталонную катушку 12 (в режиме измерения ), либо в дополнительную катушку 35 (в режи0 мах калибровки ), причем минимальное средство значение тока в эталонной катушке 12 должно быть достаточным для создания электромагнитного усилия, превышающего вес PQ. Это позво5ляет отказаться от дополнительного
источника тока. Поскольку сопротив;ления катушек 9,12, и 35 равны, суммарная мощность, выделяемая в катумках, постоянна, что приводит к режиму
Q постоянной температуры воздушного зазора магнитной системы.
j I a { If
Yjv
f f
IS .
| название | год | авторы | номер документа |
|---|---|---|---|
| Электронные цифровые весы | 1981 |
|
SU991175A1 |
| Цифровые весы | 1982 |
|
SU1089423A1 |
| Весоизмерительное устройство | 1979 |
|
SU918793A1 |
| Электронные цифровые весы | 1981 |
|
SU966502A1 |
| Электромагнитные весы | 1979 |
|
SU838389A1 |
| Электронные цифровые весы | 1978 |
|
SU742719A1 |
| Автоматические весы | 1981 |
|
SU1000771A1 |
| Электромагнитные весы | 1979 |
|
SU800666A1 |
| Телеметрическая сейсморазведочная станция с цифровым выходом | 1977 |
|
SU1040445A1 |
| Весоизмерительное устройство | 1988 |
|
SU1578497A1 |
1. ВЕСЫ С ЭЛЕКТРОМАГНИТНЫМ УРАВНОВЕШИВАНИЕМ, содержащие чувствительный элемент с грузоприемной площадкой, с системой подвесок и с измерительной катушкой, расположенной в зазоре магнитопровода и подключенной через сумматор к источнику тока,, расположенную в том же зазоре магнитопровода эталонную катушку, подключенную к первому выходу первого переключателя, управляющий вход которого и управляющий вход коммутатора соединены с командным блоком, отсчетный прибор, запоминающий блок и систему электрической компенсации в виде опорного и управляемого датчик6мТ1екомпенсации генераторов, подключенных к вычитателю частот, реверсивного счетчика, выходы которого подключены к отсчетному прибору, и подключенного к опорному генератору циклического сч етчика, кодовые выходы которых под: ключеиы к схеме сравнения кодов, фаIзового компаратора, выход которого подключен к управляющему входу токового ключа, информационный вход которого через стабилизатор соединен с выходом запоминающего блока, а прямой выход - с сумматором, отличающиеся тем, что, с целью повышения точности за счет обеспечения возможности установки нуля в процессе длительного измерения массы, в них введен второй переключатель, причем информационные входы второго шереключателя соединены с выходом вычитателя частот, управляющий вход подключен к командному блоку, одна пара выходов второго переключателя I подключена к входам запоминающего (Л блока, а другая - к входам реверсивного счетчика, выходы циклического счетчика подключены к входам коммутатора, выход которого соединен с одним входом компаратора, другой вход которого подключен к сравнения кодов, а управляющий вход отсчетного привода подключен к командному блоку. о 2. Весы по п.1, отличаю4 CD О) щие с я тем, что, с целью повышения точности за счет обеспечения стабильного температурного режима магнитной системы, в них введена дополнительная катушка, подключ енная через первый переключатель к инверсСО ному выходу токового ключа, причем измерительная, эталонная и дополнительная катушки, выполнены с равными сопротивления1./
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| G, 01 G 7/04, 1979 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР .по заявке 3274684/18-10, KJL | |||
| G, 01 G 7/04, 1981. | |||
