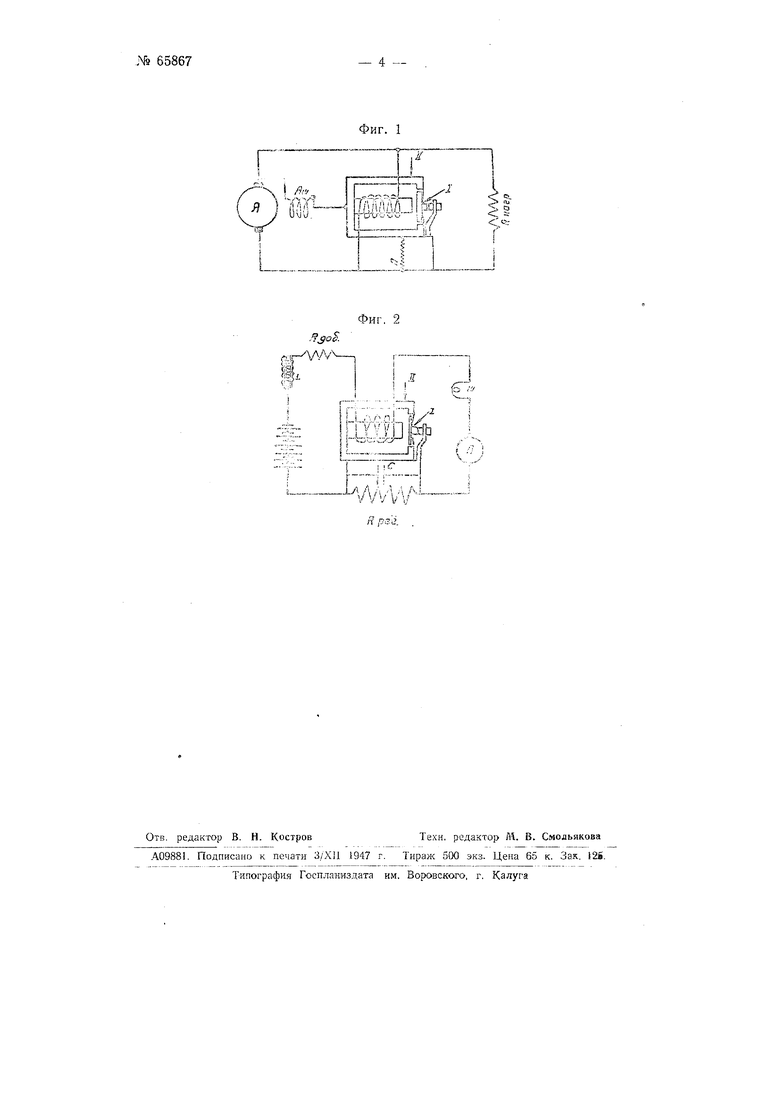
Сущность предлагаемого, соглзС;о изобретению, способа измерения силий заключается в том, что кзАгерлелюе усилие прямо или косз-енifo гфнкладызают к подвижной систе-ге электровибрационного быстродействующего прерывателя и по . тока (или кастрял ения) в цеГ1И 1 |рсрывателя, обусловленкой воздействием усилия на ,м работы последнего, судят о величине усилия. Для пояснения изобретения ниж-е описывается случай воздействия механической силы на обычный вибрационный регулятор наг ряже}1ия. работающий по схелзе Тириля. Останавливаться на описании работы такого регулятора, изобраного схелштИЧески на фиг. чертежа, «виду его оощеизвестности излищпе. При работе регулятора его контакты всё время вибрируют с частотой 100-150 Hz и а .мплитудой порядка несколь.ких микрон. Постоянство регулируемого напряжения достигается за счет авто статического изменения соотнощения времени замкнутости и времени разомкнутости контактов. При этом все время соблю|Дается равенство между силон натяга пружины и силой Р электромагнитного притяжения, создаваемой ампервитками (AW катушки регулятора. Зависимость между силой электрол:а:гнитного прнтяжения и велиMHiioii амперзитко.в д.пя насыщенной ; агниткой системы в простейшем виде высажаться так; где Р - cHjia электромагнитного притял ения. равная силе (затягу) пружины. AW - а;.;пе;;в;;тки катушки, Sue - площадь поперечного сечения сердечника и величина воздушного зазора, т. е. величины для данного регулятора и определенной регулировки постоянные, С - постоян1;ый коэфиииент. Из соотношения видно, что между AW и силой затяга пружины имеет место строго определенная зависимость. Таким образом, если как-либо менять силу затяга пружины, автоматически будут меняться ампервитки, а значит, и напряжение, поддерживаемое регуляторам.
На чертеже стрелками / и // показаны «алравления сил, действие :а1кой-либо из которых ведет к уменьшению силы затяга пружжы. Действие сил в тех же направлениях, но в Обратную сторону, естественно, ведет к у|Велич€ - кю затяга .пружины.
Если сила действует в направлении /, то она непосредственно уменьшает силу пружины-нроти(юдейстзует ей. Есл.ч сила действует в направлении // то это приоодит к тому же, но косвенно. Действительно, от действия силы // сжимаются ветви остова, что приводит также к ослаблению затя/га пружины (подобно тому, Как при сл И мании дре.вка лука ослабевает его тетива).
Мз вышеизложенного ясно, что действие сил либо в направлении /, .ли.бо в направлении Я сразу же сказывается на регулируемом напряжении. Так, если действие силы вызывает изменение Р в два раза, го регулируемое напряжение изменяется (для ненасыщенного регуляiopa) щ i/ 2 -раза. Иными словами. yjKe вибрационный ретуля тор, работающий по схеме Тириля, может 1ыть в принпипе, после соответстр.ующей тарировки, использован как динамометр для измерения статических сил (давлений), а при наличии осциллографа-к-ак устройство для ,:алиси периодически меилюищхся ..ил или давлений с частотой не больше нескольких десятков Hz. Естественно, 1 ОНечно, что для этих целей ну:кно чри мснять спсциаль -ryio упрощенную .
Ыа фиг. 2 изображена схема э,пекг.роБИбратора, работающего дшшл1-:1.метром (после соответствующей .Прирозки). Вибратор является ..iKTOipoM тока и питается от любого источ1;ика постоягпюго тока. При применении на самолете питанк-е про-исходит от бортсети самолета. Пара.метры показанных на схеме индуктивности L, сопротивления R ,00 и емкости С выбираются из расчета наивыгоднейшего тока для работы контактов и уменьшения пульсаций тока. Сопротивление .;:R per , наряду с функцией искрогашения, задает предел допустимого изменения тока, а следовательно, и
диапазон измеряе.мых сил. Показанный на схеме ам-пер.метр Л градуируется непосредственно в единицах силь( или других едииищах и слу;кит для измерения стаи,ионарных сил. Градуировка проивводится путем снятия заазжнмости между силой, прикладывае.люй к регулятору в направлении / или //, и отклонением Пр-иэора. Выше для простоты принималось, что между силой и AW, а, значит и показаииями амиер метра, существует квадратичная зависимость. Это азерпо для регулятора с а1бсолютно ненасыщенной магнитной системой. В действительности же, определенный процент ампервитков тратится на железо, вследствие чего эта зависимость никогда не может быть чисто квадратичной. Однако это ни к какой ошибке не 1при1водит, так как бы зависимость ни б,1ла, она учитывается при прадуировке. Шкалу прибора можно сделать любой, варьируя магнитным яасьвщением регулятора и направлением приложения силы. Показанный на чертеже шлейф Ш осциллографа служит для записи изменяющихся по времени сил. Для небыстро изменяюи,ихся сил, вместо шлейфа осциллографа. Может быть с успехо м применен самопишущий амперметр. Градуирогука этих при боров производится аналогично амперметру. При синусоидальных или близких к синусоиде кз:,1енениях си.чы, частота, до которой прибор работаедостаточ1 О точно, будет :орядка ncprihx десятков Hz (собственная частота замыкапий и размыкапий вибратора будет пс рядка первых сотен Hz).
Диапазон сил, которые могут быть из:мерены по предлагаемому методу, лежит от нескольких грамм до десятков и сотен килограмм. При малых силах берется их направление /, т. е. сила непосредственно или через специальную пружину воздейетвует на подвижную систему регулятора. При больших силах берется их направление //, т. е. сила сжимает или разжимает
остов регулятора. Для измерения очень больших сил {десятки и сотни килограммов) можно применять специальные имеханичес-кие шунтьк т. е. приспособления, стыкуемые с регулятором, при которых прилагаемая м-еханическая сила делится в определенной пропорции между этим шунтом и остовом регулятора (аналогично шунту амперметра в электротехнике).
Предлагаемый способ может быть испольэоваН, например, для измерения усилий во В севоэможных тягах и штюках, в частности для измерения усилий, прикладываемых на органы управления самолето м, -взамен динамометрических штурвалов, динамометрических ручек, динамометрических педалей.
Прибор, построенный по предлагаемому принципу, благодаря возможности дистанционного измерения, позволяет измерять усилие, например, в тросе, тянущем планер за самолетом, и в других подобных случаях.
Всяжого -рода измерители давлений (манометры) и разряжений (мановакуумметры) могут; быть сконструированы на основе этого способа. В этом случае прибор будет аналогичен по схеме устройству по фиг. 2, но с добавлением анерокдной коробки, сила от которой, получаЕОщаяся при иэменении давления, и действует на регулятор. Достоинством применения электровибратора в приборах этюй группы является возмол ность дистанционной пе:редачи показаний этих приборов. Действительно, алшерметр. гтроградуированный в соот-ветствуюших единицах, может быть установлен в любом месте самолета, и .число амперметров при одном чувствительном элементе (аиероидная коробка) не ограничено.
Измерение продольного или поперечного угла наклона самолета
также может бьггь произведено с помощью предлагаемого способа. В этом случае к остову регулятора прикрепляется жесткое плечо, на конце которого сосредоточен груз, создающий момент, стремящийся сжать ветви остова регулятора. Этот момент зависит от угла наклона са.молета, что и позволяет измерять; после соответствующей тарировки, указанный угол.
Шкала прибора должна быть отградуирована в градусах. Для продольного и поперечНого наклонов доллчны быть отдельные приборы.
Предлагаемый способ может быть, очевидно, Использован для целей регулирования. При этом случаи регулирования электрической величины в зависимости от .механической силы, хотя и могут встретиться, но все же они редки. Большее практическое значение имеют случаи, когда необходимо регулировать силу тяги или давления воздействием на электрический привод, путем изменения подводимых электрических параметров.
В этом последнем случае регулируемая сила (давление) воздействует на вибрирующий электрический регулятор, вследствие чего меняются автоматически электрические параметры электропривода, и этот последний произзодит регулкрование первоначальной силы (давления).
Предмет изобретен и я
Способ из.меренля усплщ, отличающийся тем, что измеряемое усилие прямо или косвенно прикладывают к подвижной скстеме электровибрационного быстродействующего прерывателя и по силе тоха (пли нглрял ения) в цепи прерывателя, обусловленной воздействием усилия на режИМ работы последнего, слдят о величкне УСИЛИЯ.
Г
.Ь.
. /.
l/iA
I) vj и
Фиг. 1
1
IS
fzF / L/АДАП/П йф
rdLwVO ; ; //
.Д/

| название | год | авторы | номер документа |
|---|---|---|---|
| Одноступенчатый вибрационный регулятор напряжения | 1939 |
|
SU74656A1 |
| Способ определения скоростей, ускорений и длительности кратковременных движений | 1936 |
|
SU49521A1 |
| Термоорерыватель для контроля процесса контактной точечной сварки | 1956 |
|
SU111573A1 |
| Прибор для измерения механических и гидравлических величин | 1932 |
|
SU44707A1 |
| УСТРОЙСТВО ДЛЯ ОТПРАВЛЕНИЯ И ПРИЕМА ЭЛЕКТРОМАГНИТНЫХ ВОЛН | 1924 |
|
SU3880A1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ | 2003 |
|
RU2250446C2 |
| Динамический штурвал для самолета | 1940 |
|
SU61138A1 |
| Преобразователь давления | 1977 |
|
SU877375A1 |
| Устройство для измерения различных величин постоянного и переменного тока | 1936 |
|
SU50518A1 |
| Установка для привада тепловозов, автомотрис и т.п. | 1933 |
|
SU56946A1 |
fsoS.
.MA/vVV Фиг. 2
Яря. .
