Пр едл а.гаем ы и односту пен ч аты и вибрациолный регулятор н апряжения служит для поддержания постоянным напряжения машин постоянного тока, работающих при переменных оборотах и нагрузках.
Всякий впбрирующий аппар-ат работает четко и (Надежно только тогда, когда частота вынужденных колебаний значительно Ниже частоты собственных Колеба.ний вибрирующей части аппарата, поэтому требуется создать такую конструкцию вибрационного регулятора, снабженного укрепленным яа пружине якорем, которая о.беспечивала бы увеличение сО|бстВен«ь х .колебаний якар-я и значительное давление между контактами.
Согласно изобретению, зто достигается там, что жесткая плоская пружина (например, из бериллиевой бронзы), несущая якорь и подвижный контакт, закреплена своими концами на рсонцах крайних ветвей Ш-образного магнитопровода регулятора и при работе регулятора изгибается не только за счет собственной упругости, но и за- счет некоторого изгибания указанных ветвей магнитопровода.
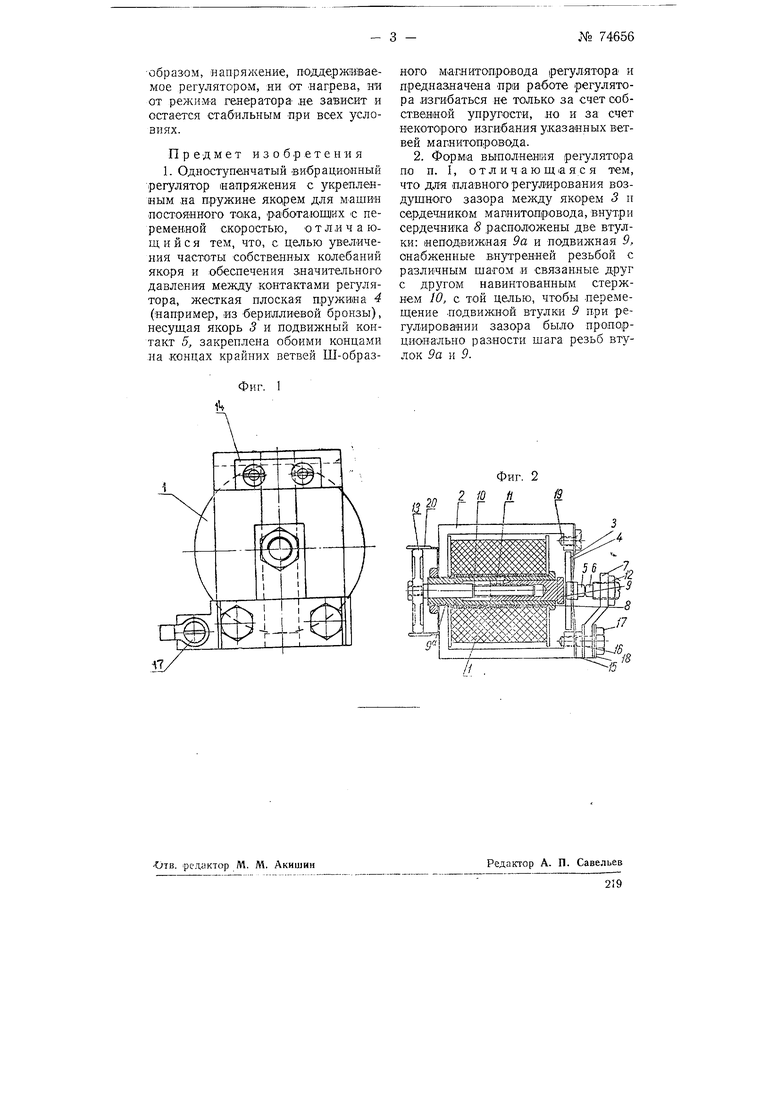
На фиг. 1 и 2 показан предлагаемый регулятор в двух проекциях.
Регулато.р имеет два вольфрамовых .контакта - 5 ,и 6. Контакт 5, прикрепленный к пружине 4 и якорю 3, вибрирует пр.и р аботе совместно с иимИ. При отсутствии тока в катущке 1 контакт 5 давит на контакт 6 с силой примерно 1000 г, что достигается прогибом пружи.ны 4 при соответствующем повороте контакта 6.
Пружигна 4, изготавленн.ая из бериллиевой бронзы, прогибается за счет сбл1ижения ветвей корпуса 2 магнитопровода, с которым она жестко ооедине.на 1пр.и помощи пластид 14 и 15 и винта 19. Контакт 6 ввернут .в стойку 7 и закреплен гайкой J2.
Стойка 7 привернута к корпусу 2 магнитопровода двумя винтами 17 и электрически изол1ирова.на от него двумя слюдяными прокладками /8 н двумя фибровыми втулками 16. Под винт /7 п:оджимается д аканечник токоотозодящего нроводника. Контакт 5 электрически связан с корпусом 2 магнитопровода, и ток подводится лепосредственно к корпусу.
Катушка / имеет одну медную обмотку. Дололнительное солротивление к ней и искрогасящее сопротивление, выполненные .из константаиа, помещаются вне катущки рег Л:Ято217
ipa. Катушка 1 сидит на неподвижном сердечиике 8 и приж-имается по, следним ,к корпусу регулятара.
Магнитная цепь регулятора образовала сердечником 8, регулироеоч, ным стержнем 10, подвижной втулкой 9, регулируемым зазоро м между последней .и якорем 3, двух зазоров между иим ,и ветвями корпуса 2 магнитопровода и магнитопроводом. Все детали магнитной цепи изготов.ляются лз стали АРМКО, обладающей наименьшим остаточным магнетизмам. Магнитный поток, создаваемый катушкой / ,а сердечнике ipery.лятора, проходит через зазор между сердечняком и якорем и разветвляется в последнем на две части, каждая из которых идет через еостояйный воздушный зазор, равный 0,15 мм, и через корпус 2 магнитопровода возвращается o6piaTiHO в сердечник.
Регулирование напряжения, под. держиваемого регулятором, производится Изменением воздушного зазора между якорем 3 и подвижной втулкой 9.
В неподвижный Оердечни1К введены две втул.ки: подвижная 9, имеющая только поступательное перемещение (от проворачивания ее предохраняет шпонка 11), и неподвижная 9а. Втулки снабжены внутренней резьбой с различным шагом- и связаны между собой навинтованным регулировочным сте;ржием 10. На конце последнего имеется регулировочная головка 13, предох,раняем.ая от провертывания пружинистой фиксирующей шайбой 20. Зазор между якорем и сердечником рег} лируется поворотом головки 13 вправо (например, на полный оборот), что ЕЛСчет за собой вывинчивание стержня 10 из неподвижной втулки 9а и перемещение его вперед (напри.мер, на 0,5 мм). Цри повороте стержня 10 на него навертывается подвижная втулка 9, которая при этом подается назад (например, на 0,6 мм). Таким образом, подвижная втулка 9 за один оборот регулировочного сте;ржня 10 подается на расстояние, пропорцио ально е разности шага резьб обеих втулок (в данном частном случае на 0,1 мм), что обеспе218
чивает плавность регулировки воздушного зазора.
Конструктивно предлагаемый регулятор на.пом и;нает лук, в котором роль тетивы играет пружина- 4 из бериллиевой бронзы, а роль изогнутой п-алки лука - корпус 2 регулятора. Контакт 6 при ввертывании ипрает роль руки человека, оттягивающей тетиву. Пружина 4, будучи изогнута, стрем ится выпрямиться под действием силы собственной упругости и силы упругости корпуса. Чем больше прулшна будет изогнута, тем с большей силой она будет стремиться разогнуться и тем, следовательно, сильнее подвижный кон:акт 5 будет давить на контакт 6. Применение плоской пружины позволяет получить значительную упругость, а, следовательно, и большую частоту собственных колебаний якоря регулятораВ предлагаемом регуляторе частота собственных колебаний может быть легко подсчитана, так как упругость и масса известны; она равна 320 пер/сек. Высо,кая частота собственных колебаний якоря позволяет получить достаточную частоту работы контактов (50-80) без всякой ускоряющей обмотки, отсутствие коТ0:рой делает напряжение, поддерживаемое регулятором, постоянным и независимым от тока шунта генератора, т. е. от оборотов и нагрузки генератораНезависимость напряжения от нагрева регулятора обеспечивается температурной компенсацией, обусловленной выполнением пружины 4 из бериллиевой бронзы и расположением ее между ветвями корпуса 2, изготовлемиого из стали. Так как коэфициент линейного расширения бронзы приблизительно в 1,5 раза больше коэфициента линейного расширения стали, то с нагревом регулятора пружина-, удлиняясь, несколько ослабевает, вследствие чего для разрыва контактов требуются уже (Меньшие а.мпервитки, что ведет к снижению напряжения. Это снижение напряжения подобрано так, что компенсирует повышение напряжения, вызываемое ув еличением сопротивления обмотки регулятора. Таким
образ-ом, иапряжение, подде.ржмв-аемое регулятором, ни -от -нагрева, ни от рел :им-а генератора- ,не зависит и остается стабильным -при всех условиях.
Пре-дмет изобретения 1. Одноступенчатый ви-браци-о«ный регулятор 1на-пр-яжен-ия с укрепленным .на пружине якарем для м-ашия п-ост-ояйн-ого тока, р-а б1отаюш)их с перемениой скоростью, отличающийся тем, что, с целью увеличения частоты собственных колебаний якоря и обеспечения значительного давления между контактами регулятора, жесткая плоская пружииа 4 (например, из -бериллиевой бронзы), несущая якорь 5 и подвижный контакт 5, закреплена обоими концами на -концах крайних ветвей Ш-образФиг. 1
ного мйгнитопровода регулятора и предназначена при ра-боте регулятора изгибаться не только за счет собственной упругости, но и за счет некоторого изгибания указанных ветвей магнитонро-вода.
2. OopMia вьгаол-нения регулятора по п. I, отл и ч а ю яс я тем, что ДЛЯ плавн-ого регулирования воздуш-ного зазора между якорем 3 и се1рдечником малнитопр овода, внутри сердечника 5 расположены две втулки: (Неподвижная 9а и подвижная 9, снабженные внутренней р-езьбой с различным шагом -и связан-ные друг с дрзтом навинтованным стержнем 10, с той целью, чтобы -перемещение -подвижн-ой втулки 9 при регулировании зазора было пропорци-онально разности шага резьб втулок 9а и 9.
i8
15
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения усилий | 1943 |
|
SU65867A1 |
| Пружинный чувствительный элемент гравиметра | 2024 |
|
RU2829061C1 |
| Машина для сварки трением | 1986 |
|
SU1382624A1 |
| Электродинамический сейсмоприемник | 1982 |
|
SU1056105A1 |
| Аппарат для автоматической дуговой сварки | 1945 |
|
SU69807A1 |
| РЕЛЕ ЭЛЕКТРОМАГНИТНОЕ | 2011 |
|
RU2458426C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ВИБРОВОЗБУДИТЕЛЬ | 2021 |
|
RU2774667C1 |
| Устройство для автоматического управления затворной рамой выпускного механизма сушилки | 1952 |
|
SU99326A1 |
| ВЕТРОДВИГАТЕЛЬ | 2011 |
|
RU2464444C1 |
| ВЫСОКОВОЛЬТНЫЙ ВАКУУМНЫЙ ПЕРЕКЛЮЧАТЕЛЬ | 2003 |
|
RU2260868C2 |
