1
Изобретение относится к технической акустике и может найти применение в качестве источника механических колебаний в стендах для виброиспытаний и моделирования.
Известны электродинамические вибраторы, в которых созданием большой жесткости для среднего положения катушки возбудителя и нулевой жесткости для моментных значений обеспечивается постоянная фазо-частотная характеристика 1.
Наиболее близкое к изобретению техническое решение - электродинамический вибратор, содержаш,ий магнитопровод с обмоткой подмагничивания, подвижную цилиндрическую катушку, установленную в воздушном зазоре магнитопровода, длина которой больше длины воздушного зазора, задаюш,ий генератор, последовательно соединенные сумматор и усилитель, подключенный к подвижной катушке, источник регулируемого напряжения, соединенный через блок сравнения и блок усреднения с датчиком положения, и суммируюш,ий усилитель, включенный между блоком сравнения и сумматором 2.
Однако такие вибраторы имеют непостоянную фазо-амплитудно-частотную характеристику.
Цель изобретения - расширение функциональных возможностей вибратора.
Это достигается тем, что в него введены частотный датчик, два блока перемножения и блок дифференцирования, причем выход задаюш его генератора подключен к одному входу первого блока перемножения и через частотный датчик и второй блок перемножения к его второму входу, выход первого блока перемножения соединен с сумматором, вход блока дифференцирования соединен с выходом блока усреднения, а его выход - с входом суммирующего усилителя.
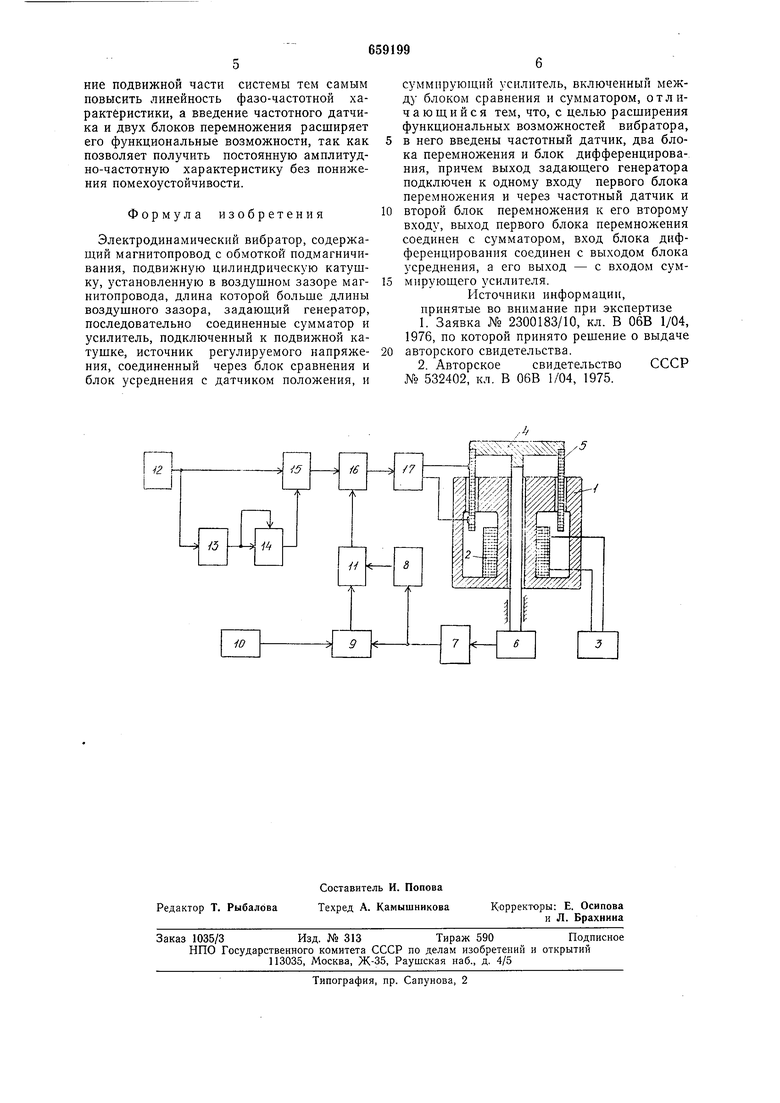
На чертеже показана схема электродинамического вибратора.
Электродинамический вибратор содержит магнитопровод 1 с катушкой подмагничивания 2, подключенной к источнику 3 постоянного тока, и подвижн ю катушку 4, имеюш;ую цилиндрическую обмотку 5.
Для питания обмотки 5 используется обратная цень, состоящая из датчика 6 положения подвижной катушки 4, блоков усреднения 7, дифференцирования 8, сравнения 9, источника 10 регулируемого напряжения и суммирующего усилителя 11, а также прямая цеиь, состоящая из генератора 12, частотного датчика 13, двух блоков перемножения 14 и 15, сумматора 16 и усилителя 17 мощиости. Движение подвижных частей вибратора определяется уравнением dx ст F, где т - масса подвижной части; F - электромагнитная сила, действующая на подвижную часть; X - координата подвижной части; t - время. Если электродинамическим вибратором генерируются механические колебания гармонического типа, то координата определяется выражением x(t)а sin wt. где -ю - круговая частота колебаний a&m(. Следовательно, амплитуда -колебаний является функцией частоты и с увеличением последней уменьшается по квадратичному закону. А фаза колебаний из-за наличия блока усреднения в обратной связи электродинамического вибратора, т. е. из-за отсутствия жесткости для моментных значений координаты является постоянной и передвинутой по отношению возбуждения на величину я. Чтобы обеспечить постоянную амплитудно-частотную характеристику электродинамического вибратора, электрический сигнал с выхода генератора 12 поступает на вход частотного датчика 13. На выходе последнего образуется электрический сигнал, пропорциональный круговой частоте колебаний (0. После возведения в квадрат блоком перемножения 14 электрический сигнал, уже пропорциональный w, поступает на один вход другого блока перемножения 15. В блоке 15 происходит перемножение электрического сигнала, поступившего прямо из генератора 12 с электрическим сигналом, пропорциональным со, так что на выходе блока 15 формируется сигнал, пропорциональный co asinca. Так как по первому входу сумматора 16 коэффициент передачи равен т, то на вход усилителя 17 мощности по прямой цепи управления вибратора поступает сигнал, пропорциональный mw asinco. При питании обмотки 5 электрическим сигналом, пропорциональным mco asincoi, уравнение (2) приобретает вид x(f) тюа sin с«,(3) следовательно амплитуда механических колебаний остается постоянной и при изменении частоты возбуждения. Если электродинамическим вибратором генерируются механические колебания негармонического типа, что может иметь место в случае использования его и моделировании, то указанные выше действия в зависимости от требуемой точности производятся с несколькими гармониками. При этом для выделения отдельных гармоник может использоваться аналоговый анализатор, который включается перед входами частотных датчиков, число которых, а также число блоков перемножения зависит от числа выделяемых гармоник. С помощью датчика 6 положения и блока 7 усреднения регистрируется значение положения подвижной системы, вокруг которого происходят механические колебания. В электродинамическом вибраторе предусмотрена возможность регулирования этого положения с помощью источника 10 регулируемого напряжения. В блоке 9 сравнения сигнал, пропорциональный действительному положению подвижной части, сравнивается с требуемым значением пололсения, задаваемым источником 10, и электрический сигнал, пропорциональный отклонению, через суммирующий усилитель 11, сумматор 16 и усилитель 17 мощности поступает в обмотку 5. Дополнительная сила, пропорциональная отклонению, воздействует на подвижную часть так, чтобы поддерживалось заданное значение положения системы. Использование специального блока усреднения исключает возможность возникновения колебаний на низких частотах. Однако характеристика переходного процесса зависит только от демпфирования подвижной части системы и это демпфирование не может быть сколь угодно малым, так как не затухнут собственные колебания системы, описываемой уравнением тх F, sign (.0 - х),(4) где PI - сила, обеспечивающая заданное положение подвижной системы вибратора; Хо - заданное положение; X - фактическое положение. Для улучшения качества переходного процесса в электродинамический вибратор введен блок 8 дифференцирования усредняющего сигнала. Тогда уравнение (1) подвижных частей вибратора примет вид тх . Р„ + Р,- sign (х. -х) ,. sign (ЙО,(5) где РП--сила, действующая по прямой цепи;р2 - сила, обеспечивающая желаемое демпфирование. Силы FI и 2 по сравнению с силой /п являются малыми и зависят от конкретных динамических и конструктивных параметров самого вибратора. Таким образом, использование блока дифференцирования усредняющего сигнала позволяет улучшить характеристику переходного процесса и уменьшить демпфирование подвижной части системы тем самым повысить линейность фазо-частотной характеристики, а введение частотного датчика и двух блоков перемножения расширяет его функциональные возможности, так как позволяет получить постоянную амплитудно-частотную характеристику без понижения помехоустойчивости.
Формула изобретения
Электродинамический вибратор, содержащий магнитопровод с обмоткой подмагничивания, подвижную цилиндрическую катушку, установленную в воздушном зазоре магнитопровода, длина которой больше длины воздушного зазора, задаюш,ий генератор, последовательно соединенные сумматор и усилитель, подключенный к подвижной катушке, источник регулируемого напряжения, соединенный через блок сравнения и блок усреднения с датчиком положения, и
суммирующий усилитель, включенный между блоком сравнения н сумматором, отличающийся тем, что, с целью расширения функциональных возможностей вибратора, в него введены частотный датчик, два блока перемножения и блок дифференцирования, причем выход задающего генератора подключен к одному входу первого блока перемножения и через частотный датчик и
второй блок перемножения к его второму входу, выход первого блока перемножения соединен с сумматором, вход блока дифференцирования соединен с выходом блока усреднения, а его выход - с входом суммирующего усилителя.
Источники информации, принятые во внимание при экспертизе
1.Заявка № 2300183/10, кл. В 06В 1/04, 1976, по которой принято решение о выдаче
авторского свидетельства.
2.Авторское свидетельство СССР № 532402, кл. В 06В 1/04, 1975.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОДИНАМИЧЕСКИЙ ВИБРАТОР | 1991 |
|
RU2016667C1 |
| Электродинамический вибратор | 1990 |
|
SU1741925A1 |
| Электродинамический вибратор | 1988 |
|
SU1509126A2 |
| Электродинамический вибратор | 1979 |
|
SU835528A1 |
| Электродинамический вибратор | 1984 |
|
SU1248673A2 |
| Электродинамический вибратор | 1980 |
|
SU902861A1 |
| Электродинамический вибратор | 1975 |
|
SU546386A1 |
| Электродинамический вибратор | 1979 |
|
SU835527A1 |
| Электродинамический вибратор | 1980 |
|
SU869842A1 |
| Электродинамический вибратор | 1980 |
|
SU977047A1 |
