I
Изобретение относится к устройствам для возбуждения механических колебаний и может быть использовано в стендах для виброиспытаний приборов.
Известен электродинамический вибратор l}, позволяющий осуществить перемещение стола вибратора по заданному закону. Однако вибратор не позволяет достичь высокой точности исполнения заданного закона из-за возникновения составляющих шума в цепях дифференцирования.
Известен также электродинамический вибратор, содержащий магнитопровод с обмоткой подмагничивания, установленной в воздушном зазоре магнитопровода, подвижную катушку, длина которой превьш1ает длину воздушного зазора, задающий генератор, соединенный с усилителем и усилитель мощности, подключенный к подвижной катзппке, к которой прикреплены датчики силы и ускорения С2.
Однако в таком вибраторе возможны возникновения неустойчивых режимов колебаний, вызываемых фазовым сдвигом в электромагнитной части (т.е. из-за индуктивности катушки). Поэтому точное вьтолнение заданного закона невозможно, а также возникает опасность возникновения вредных неустойчивых колебаний, которые могут привести к разрзшению исследуемого объекта.
Целью изобретения является исключение неустойчивых колебаний устройства.
Поставленная цель достигается тем, что в устройство введены второй уси- , литель, интегратор и сумматор, причем ко входу второго усилителя подключен датчик ускорения, а его выход соединен с интегратором и одним из входов сумматора, к остальным входам которого подключены выходы интегратора, первого усилителя и датчика
ИЛЫ, а выход сумматора соединен со входом усилителя, мощности.
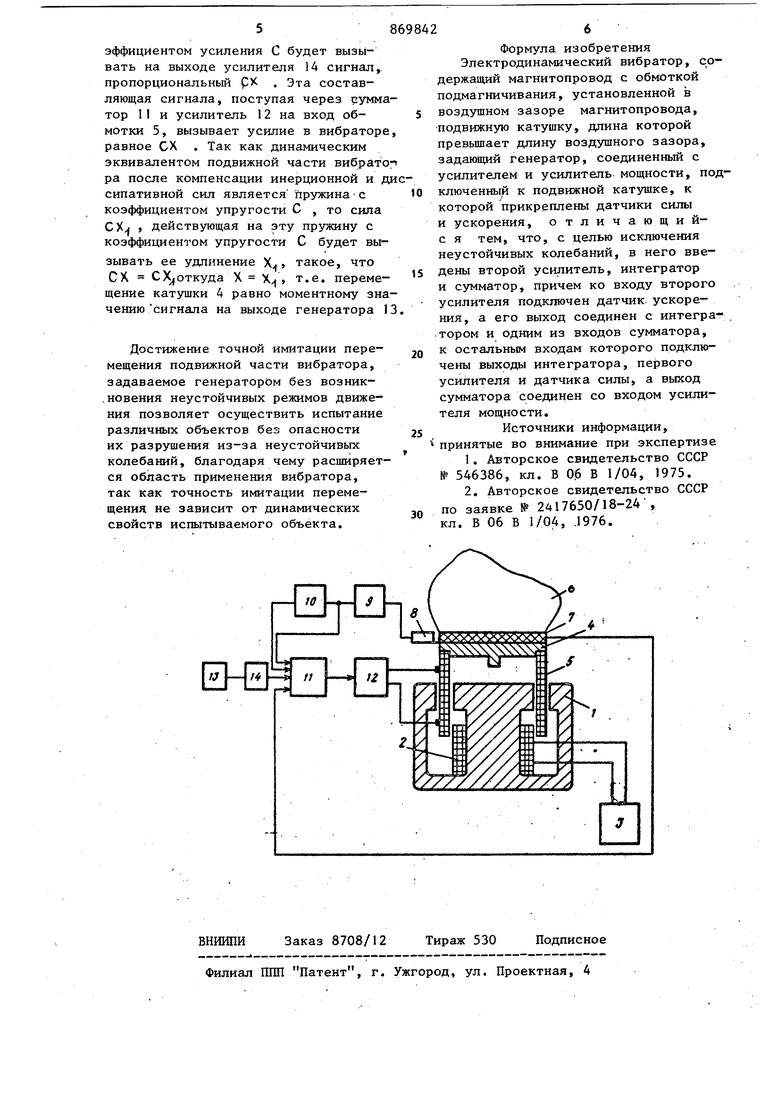
На чертеже схематически изображен электродинамр ческий вибратор.
Он содержит магнитопровод 1 с катушкой 2 подмагничивания, подключенной к источнику 3 постоянного тока, и подвижную катушку 4 имеющую цилиндривескую обмотку 5, испытываемый объект 6, датчик силы 7, расположенный между катушкой 4 и объектом 6, датчик ускорения 8, усилитель 9, интегратор 10, сумматор 11, первый вход которого соединен с выходом датчика силы, второй - с выходом усилителя 9, третий - с выходом интегратора, а выход датчика 8 соединен с входом -усилителя 9, выход которого, в свою очередъ, соединен с входом интегратора, усилитель мощности 12, через который выход сумматора соединен с входом подвижной катушки, генератор 13 и усилитель 14, через который выход генератор соединен с четвертым входом сумматора.
Устройство работает следуюш 1м образом.
Сигнал с выхода генератора 13 через усилитель 14 поступает на вход сумматора 11 и через усилитель мощности поступает на вход обмотки 5 катушки 4 и вызывает усилие, пропорциональное этому сигналу, передаваемому .цилиндрической катушке 4 и тем самым объекту 6. Подвижная катушка 4 и объект 6 при этом начинают колебаться. Колебания вызывают силу реакции между катушкой 4 и объектом 6, которую фиксирует датчик силы 7. Сигнал с выхода датчика силы 7 поступает на вход сумматора 11 и через усилитель мощности 12 действует на обмотку 5 катушки 4 и вызывает силу, компенсирующую силу, действующую между катушкой 4 и объектом 6. При этом координата перемещения объекта 6 и катушки 4 будет зависеть только от динамических свойств подвижной части вибратора, т.е. массы, демпфирования и жесткости подвески подвижной цилиндрической катушки. На выходе / датчика ускорения 8 получается сигнал, пропорциональный ускорению перемещения катушки 4, который поступает на.вход сумматора 11 через усилитель 9 с коэффициентом усиления, пропорциональным массе подвижной катушки, и на выходе сумматора вызывает составляющую сигнала, равную
инерционной силе подвижной части вибратора. Этот сигнал подается через усилитель мощности 12 на обмотку 5 и вызывает силу, равную инерционной силе вибратора, но противоположного знака, и его компенсирует. Аналогично компенсируется и диссипативная составляющая силы. Для этого сигнал с выхода усилителя 9 поступает на вход интегратора 10, на выходе которого появляется сигнал, пропорциональный скорости перемещения подвижной катушки 4. Этот сигнал с выхода блока 10 поступает на вход сумматора 11 через коэффициент демпфирования подвижной части вибратора и на выходе сумматора J1 вызывает составляющую сигнала, пропорциональную диссипативной силе, действующей в подвижной части вибратора. Этот сигнал поступает через усилитель мощности 12 на обмотку 5 и вызывает усилие, равное диссипативной силе в подвижной части и противоположного знака. Таким образом осуществляется и компенсация диссипативной силы. Обмотка 5 катушки 4 имеет определеннук индуктивность, исходя из этого и инерционность. По этому компенсирующее инерционное и диссипативное усилие будет действовать в подвижную часть вибратора с некоторым фазовым сдвигом относительно собственных сил, действующих в подвижной части. Это вызывает только некоторую небольшую ошибку при компенсации, но не вызывает неустойчивых движений в системе вплоть до полной компенсации этих сил. Однако, если далее произвести компенсирование упругой силы, действующей в подвижной части вибратора, то подобная запаздывающая обратная, связь, как для компенсации инерционной и диссипативной сил, будет приводить к неустойчивым движениям уже при небольших фазовых сдвигах.
Поэтому сигнал с выхода генератора 13 поступает на вход сумматора через усилитель 14 с коэффициентом усиления, численно равным коэффициенту жесткости подвески катушки 4.Итак, если после компенсации диссипативной и инерционной сил подвижной части вибратора она становится эквивалентной пружине с коэффициентом упругости С , то сигнал с выхода генератора 13, пропорциональный задаваемому перемещению катушки 4, например X, поступающий через усилитель 14 с коэффициентом усиления С будет вызывать на выходе усилителя 1Д сигнал, пропорциональный рХ . Эта составляющая сигнала, поступая через сумм тор 11 и усилитель 12 на вход обмотки 5, вызывает усилие в вибратор равное СХ . Так как динамическим эквивалентом подвижной части вибрат ра после компенсации инерционной и сипативной сил является пружинас коэффициентом упругости С , то сила СХ ) действующая на эту пружину с коэффициентом упругости С будет вы зывать ее удлинение X , такое, что СХ СХ откуда X Х , т.е. переме щение катушки 4 равно моментному зн чению сигнала на выходе генератора Достижение точной имитации перемещения подвижной части вибратора, задаваемое генератором без возник,новения неустойчивых режимов движения позволяет осуществить испытание различных объектов без опасности их разрушения из-за неустойчивых колебаний, благодаря чему расширяет ся область применения вибратора, так как точность имитации перемещения не зависит от динамических свойств испытываемого объекта. Формула изобретения Электродинамический вибратор, содержащий магнитопровод с обмоткой подмагничивания, установленной в воздушном зазоре магнитопровода, подвижную катушку, длина которой превьшгает длину воздушного зазора, задающий генератор, соединенный с усилителем и усилитель мощности, подключенный к подвижной катушке, к которой прикреплены датчики силы и ускорения, отличающийс я тем, что, с целью исключения неустойчивых колебаний, в него введены второй усилитель, интегратор и сумматор, причем ко входу второго усилителя подключен датчик ускорения, а его выход соединен с интегратором и одним из входов сумматора, к остальным входам которого подключены выхода интегратора, первого усилителя и датчика силы, а выход сумматора соединен со входом усилителя мощности. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 546386, кл. В 06 В 1/04, 1975. 2.Авторское свидетельство СССР по заявке Г 2417650/18-24, кл. В 06 В 1/04, .1976.

| название | год | авторы | номер документа |
|---|---|---|---|
| Электродинамический вибратор | 1985 |
|
SU1269853A1 |
| Электродинамический вибратор | 1980 |
|
SU977047A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ПАРАМЕТРОВ ВИБРОДВИГАТЕЛЯ | 1992 |
|
RU2045094C1 |
| Устройство для измерения механического импеданса объектов,имеющих собственную подвижность | 1979 |
|
SU894371A1 |
| Электродинамический вибратор | 1977 |
|
SU659199A1 |
| Электродинамический вибратор | 1980 |
|
SU902861A1 |
| Электродинамический вибратор | 1975 |
|
SU546386A1 |
| СПОСОБ ДИНАМИЧЕСКИХ ИСПЫТАНИЙ ДЕФОРМИРУЕМЫХ ЭЛЕМЕНТОВ | 1991 |
|
RU2085890C1 |
| Электродинамический вибратор | 1981 |
|
SU986509A1 |
| Электродинамический вибратор | 1978 |
|
SU921637A1 |
