частоты, а также формирователем сигнала датчика углового положения вала шагового двигателя, причем выходы задатчиков через формирователи соединены с соответствующими входами ключевых схем, вторые входы которых соединены с соответствующими выходами блока автоматики, а выходы ключевых схем соединены с входами компаратора, к одному из входов которого подключен выход формирователя сигнала датчика углового положения вала шагового двигателя, а выход компаратора соединен с входом блока формирования рабочих имнульсов шагового двигателя, второй вход которого соединен через регулирующий делитель частоты с выходом задающего генератора и блоком автоматики, а выход - с шаговым двигателем.
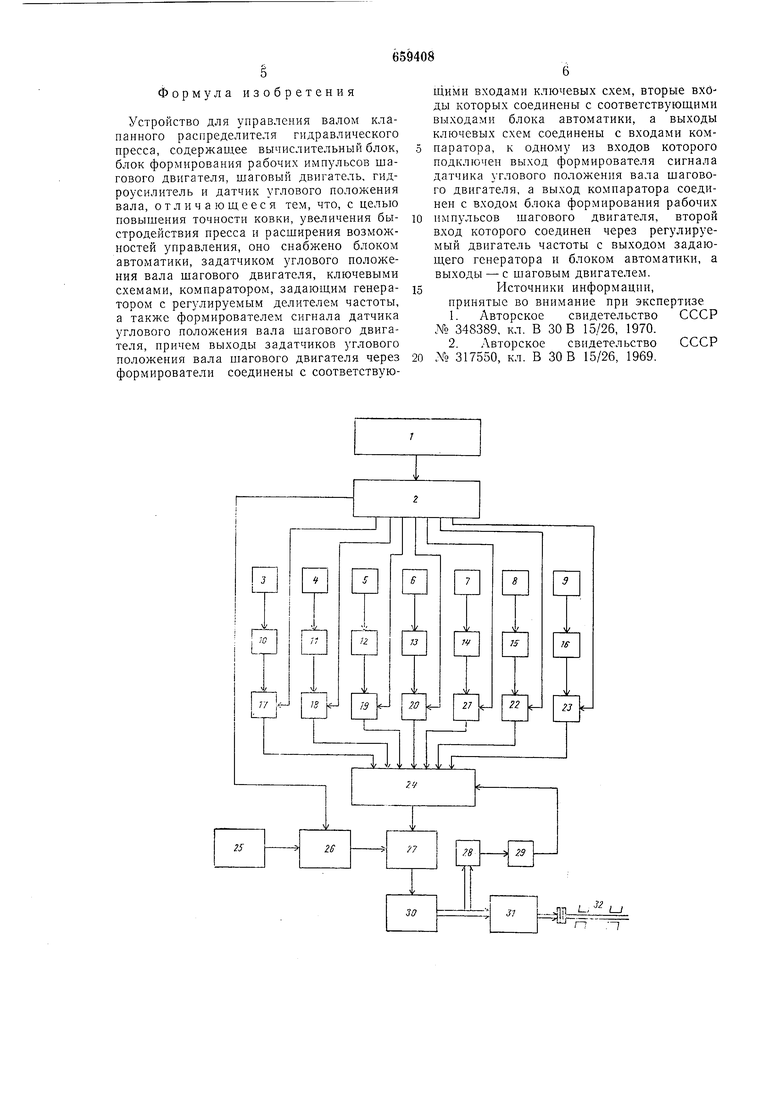
На чертеже представлена функциональная блок-схема предлагаемого устройства.
Устройство включает вычислительный блок 1, в котором формируется закон управления. Выход блока соединен с блоком автоматики 2, осуществляющим заданный цикл работы устройства. В устройстве имеются задатчики 3-9 углового положения вала шагового двигателя (в частности, в конкретной схеме использованы бесконтактные сельсины, работающие в режиме фазовращателя). Задатчики углового положения снабжены формирователями опорного сигнала 10-16, выходы которых соединены с соответствующими ключевыми схемами 17-23, вторые входы которых соединены с блоком автоматики 2, а выходы - с соответствующими входами компаратора24.
В устройство входит задающий генератор 25, выход которого соединен с входом регулируемого делителя частоты 26, второй вход которого соединен с блоком автоматики 2, а выход соединен с блоком формирователя рабочих импульсов шагового двигателя 27. Датчик 28 углового положения вала шагового двигателя (в конкретной схеме-сельсин, работающий в режиме фазовращателя) снабжен формирователем 29, выход которого подключен к соответствующему выходу компаратора 24. С выходом блока формирования рабочих импульсов шагового двигателя 27 соединен шаговый двигатель 30 (снабженный датчиком углового положения), который через гидроусилитель 31 осуществляет разворот вала клапанного распределителя 32 пресса.
Работа устройства осуществляется следующим образом.
Вычислительный блок 1 в соответствии с выбранным алгоритмом производит формирование закона управления, который в виде сигнала определенной временной длительности поступает на выход блока автоматики 2. Блок автоматики 2 обеспечивает логическую последовательность работы всего устройства с учетом динамики работы
гидросистемы пресса и технологически: требований процесса ковки. Для обеспечения этих требований вал клапанного распределителя 32 гидравлического пресса должен разворачиваться на определенные, заранее заданные углы. Необходимые угловые положения задаются с помощью задатчиков 3-9 углового положения, определяющих п положений вала клапанного распределителя 32, например 7 положений, соответствующих ходу приближения, рабочему ходу, возвратному ходу, прямому ходу шлихтовки, обратному ходу шлихтовки, нулевому положению (траверса пресса неподвижна) и ручному управлению. Выходные сигнала каждого из задатчиков 3-9, работающих одновременно и независимо один от другого, поступают на входы соответствующих формирователей 10-16, откуда в
виде прямоугольных импульсов подаются на входы ключевых схем 17-23, вторые входы которых соединены с блоком автоматики 2. При работе устройства блок автоматики 2 выдает сигнал разрешения на
нужную ключевую схему и сигнал соответствующего задатчика поступает на один из входов компаратора 24. Такое прохождение сигнала на входы компаратора обеспечивается по всем каналам задатчиков. Независимо от работы блока автоматики 2 задающий генератор 25 выдает на вход регулируемого делителя частоты 26 последовательность импульсов. Их частота на делителе 26 регулируется блоком автоматики
2 в зависимости от того, какой канал задатчика подключается на вход компаратора 2. Импульсы заданной частоты поступают на блок формирования рабочих импульсов шагового двигателя 27 и с его выхода - на шаговый двигатель 30. Шаговый двигатель 30 через гидроусилитель 31 осушествляет разворот вала клапанного распределителя 32. Контроль за угловым положением вала
шагового двигателя осушествляется датчиком 28 углового положения, выходной сигнал которого поступает через формирователь 29 на соответствуюший вход компаратора 24.
Таким образом, в предлагаемом устройстве формирование рабочих импульсов шагового двигателя происходит постоянно, а их поступление на шаговый двигатель регулируется компаратором, который осуществляет сравнивание сигнала соответствующего задатчика и датчика углового положения вала шагового двигателя и одновременно выдает разрешение на поступление рабочих импульсов на вход шагового двигателя до момента сравнения сигнала задатчика и датчика углового положения вала шагового двигателя, что позволяет значительно повысить точность изготовления поковок, увеличить быстродействие пресса
и расширить возможности управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления валом клапанного распределителя гидравлического пресса | 1977 |
|
SU783049A2 |
| Устройство для автоматической градуировки и печатания шкал измерительных приборов | 1986 |
|
SU1406549A1 |
| Устройство для измерения мощности двигателя | 1982 |
|
SU1030678A1 |
| СИСТЕМА УПРАВЛЕНИЯ ПРИВОДАМИ СТАНКА-АВТОМАТА ДЛЯ ШЛИФОВАНИЯ ВИНТОВЫХ КАНАВОК РЕЖУЩЕГО ИНСТРУМЕНТА | 1990 |
|
RU2031771C1 |
| Устройство для управления шаговым двигателем | 1986 |
|
SU1379936A1 |
| Устройство для вывода графической информации | 1985 |
|
SU1247908A1 |
| СИСТЕМА УПРАВЛЕНИЯ ПРИВОДАМИ СТАНКА-АВТОМАТА ДЛЯ ОБРАБОТКИ ВИНТОВЫХ КАНАВОК НА ИЗДЕЛИИ | 1993 |
|
RU2082594C1 |
| Устройство для программного управления шаговым двигателем | 2021 |
|
RU2784828C1 |
| Автомат для шлифования винтовых канавок | 1985 |
|
SU1713778A1 |
| УСТРОЙСТВО ДЛЯ ДИАГНОСТИРОВАНИЯ ТРАНСМИССИЙ ТРАНСПОРТНЫХ СРЕДСТВ | 1993 |
|
RU2070316C1 |
