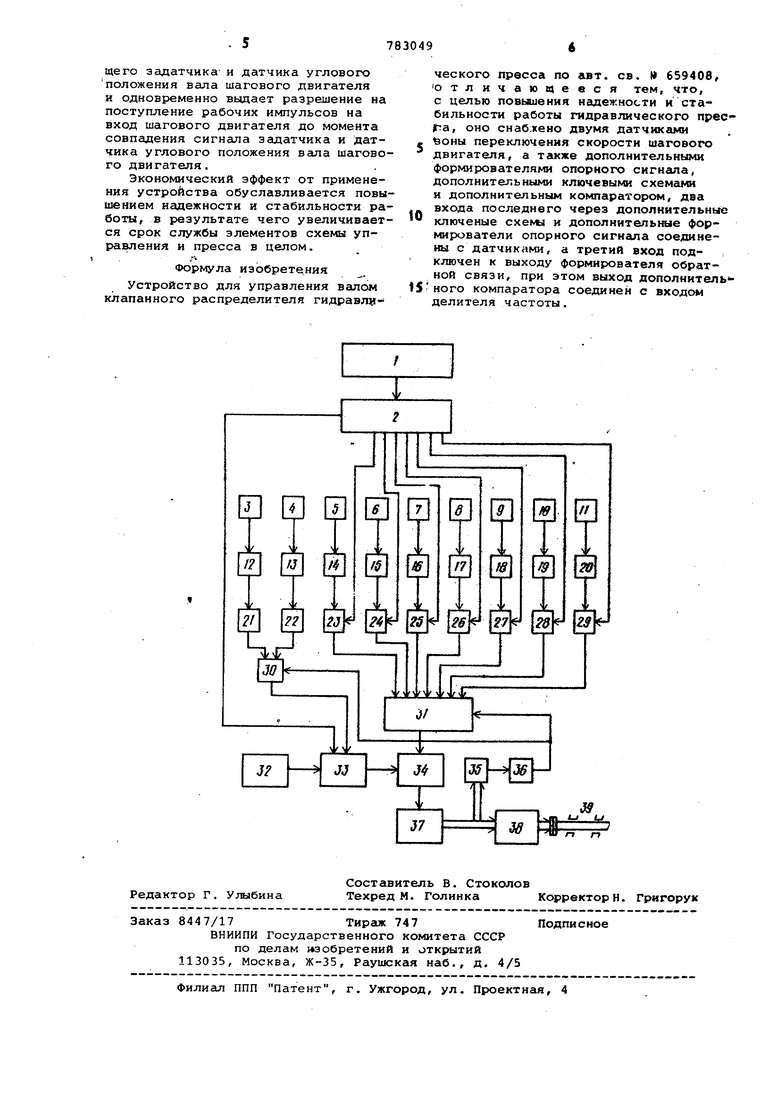
упомянутьоми датчиками,а третий вход подключен к выходу формирователя обратной связи, при этом выход дополнительного компоратора соединен с входом делителя частоты. На чертеже приведена функциональная схема устройства. Устройство состоит из вычислитель )ного блока 1, в котором формируется закон управления, выход которого сое дИнен с блоком автоматики 2, осущестрляквдим заданный цикл работы, В устройстве имеются датчики 3, 4 зоны переключения скорости шагового дригателя, задатчики 5-11 углового положения вала шагового двигателя, например, бесконтактные сельсины, реботакжцие в режи1 ю фазовращателя. Датчики зоны переключения скорости шагового двигателя и задатчики углового положения вала шагового двигателя снабжены формирователями опорного сигнала 12-20, выходы которых соединены с соответствующими дополнительными ключевыми схемами 21, 22 ,И;основными ключевыми схемами 23-29 первые из которых подключены к допрлнительному компаратору 30, вторые входы последних подключены к блоку а&томатики, а выходы - к компаратору 31. В устройство входит также задающий генератор 32, выход которого соединен с входом регулируемого делителя частоты 33, второй вход которого -соединен с блоком автоматики, а выход делителя частоты соединен с блоком 34 формирователя рабочих импульсов шагового двигателя. Датчик 35 углового положения вала шагового двигателя снабжен формирователем 36 выход которого подключен к соответст вующему входу второго компаратора. С выходом блока формирователя рабочих импульсов шагового двигателя сое динен шаговый двигатель 37 (снабжен ная датчиком углового положения и датчиками зоны переключения скорост шагового двигателя), который через гидроусилитель 38 осуществляет разво рот 39 клапанного распределител пресса. Работа устройства осуществляется следующим образом. Вычислительный блок 1 в соответст ви« с выбранным алгоритмом производит формирование закона управления, который в виде сигнала определенной временной длительности поступает на вход блока автоматики. Блок автоматики 2 обеспечивает логическую последовательность работы всего устройс ва с учетом динамики работы гидро истемы пресса и технологических требований процесса ковки. Для обеспечения этих требований вал клапанного распределителя гидравлического пресса должен разворачиваться на определенные, зараннее заданные углы, необходимые угловые положения задаются с помощью задатчиков углового положения 5-11, определяющих п положений вала клапанного распределителя (в приведенном на схеме устройстве - семь), соответствующих ходу приближения, рабочему ходу, возвратному ходу, прямому ходу шлихтовки, обратному ходу шлихтовки, нулевому положению (траверса пресса неподвижна) и ручному управлению. Выходные сигналы каждого из задатчиков, работающих одновременно и независимо друг от друга, поступают на входы соответствующих формирователей 14-20, откуда в виде прямоугольных импульсов подаются на входы ключевых схем 23-29, вторле входы которых соединены с блоком автоматики. При работе устройства блок автоматики выдает сигнал разрешения на нужную ключевую схему и сигнал соответствующего задатчика поступает на один из входов компаратора 31. Такое прохождение сигнала на входы компаратора обеспечивается по всем каналам задатчиков. Независимо от работы блока автоматики, задающий генератор 32 выдает на вход регулируемого делителя 33 часто ты последовательности импульсов. Их частота на делителе регулируется блоком автоматики в зависимости от того, какой канал-задатчика подключается на вход компаратора. Независимо от блока автоматики на вход управляемого делителя частоты воздействует сигнал с выхода дополнительного компаратора 30, образу ющийся в результате сравнения на входах компаратора сигнала с выхода формирователя 36 сигнала датчика 35 положения вала шагового двигателя и сигналов от датчиков 3, 4 зоны переключения скорости шагового двигателя, преобразованных соответстсвунядими формирователями 12, 13 опорного сигнала и ключевых схем 21, 22. В результате этого в районе малых углов вала шагового двигателя управляющий сигнал снижает частоту сигнала иа выходе делителя, а следовательно, частоту рабочих импульсов на выходе формирователя 34 рабочих импульсов шагового двигателя, уменьшается скорость движения шагового двигателя 37, осуществляющего через гидроусилитель 38 разворот Всша 39 клапанного распределителя пресса с пониженной скоростью. КонтрольвЗа угловым положением вала шагового двигателя осуществляется датчиком 35 углового положения, выходной сигнал которого поступает через формирователь 36 на вход компараторов 30.и 31. Б устройстве формирование рабочих импульсов шагового двигателя происходит постоянно, а их поступление на шаговый двигатель регулируется компаратором 31, который осуществляет сравнение сигналов соответствующего эадатчика- и датчика углового положения вала шагового двигателя и одновременно выдает разрешение на поступление рабочих импульсов на вход шагового двигателя до момента совпадения сигнала эадатчика и датчика углового положения вала шагового двигателя.
Экономический эффект от применения устройства обуславливается повышением надежности и стабильности работы, в результате чего увеличивается срок службы элементов схемы управления и пресса в цепом.
/ч
Формула изобретения Устройство для управления валом клапанного распределителя гидpaБл ческого пресса по авт. св. I 659408, отличающееся тем, что, с целью повьоиения надежности и стабильности работы гидравлического прес га, оно снабжено двумя датчиками оны переключения скорости шагового двигателя, а также дополнительными формирователями опорного сигнала, дополнительными ключевыми схемами и дополнительным компаратором, два входа последнего через дополнительны с ключевые схекы и дополнительные формирователи опорного сигнала соединены с датчиками, а третий вход подключен к выходу формирователя обратной связи, при этом выход дополнитёль
5 ного компаратора соединен с входом делителя частоты.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления валом клапанного распределителя гидравлического пресса | 1977 |
|
SU659408A1 |
| Устройство для автоматической градуировки и печатания шкал измерительных приборов | 1986 |
|
SU1406549A1 |
| Устройство для измерения мощности двигателя | 1982 |
|
SU1030678A1 |
| СИСТЕМА УПРАВЛЕНИЯ ПРИВОДАМИ СТАНКА-АВТОМАТА ДЛЯ ШЛИФОВАНИЯ ВИНТОВЫХ КАНАВОК РЕЖУЩЕГО ИНСТРУМЕНТА | 1990 |
|
RU2031771C1 |
| Способ управления гидравлическим прессом и устройство для его осуществления | 1989 |
|
SU1682211A1 |
| Устройство для управления шаговым двигателем | 1986 |
|
SU1379936A1 |
| Автомат для шлифования винтовых канавок | 1985 |
|
SU1713778A1 |
| СИСТЕМА УПРАВЛЕНИЯ ПРИВОДАМИ СТАНКА-АВТОМАТА ДЛЯ ОБРАБОТКИ ВИНТОВЫХ КАНАВОК НА ИЗДЕЛИИ | 1993 |
|
RU2082594C1 |
| Преобразователь угла поворота вала в код | 1982 |
|
SU1020845A1 |
| Привод ориентации шпинделя металлорежущего станка | 1984 |
|
SU1241194A1 |
