Где d - диаметр сечения выходного пучка
лазера.
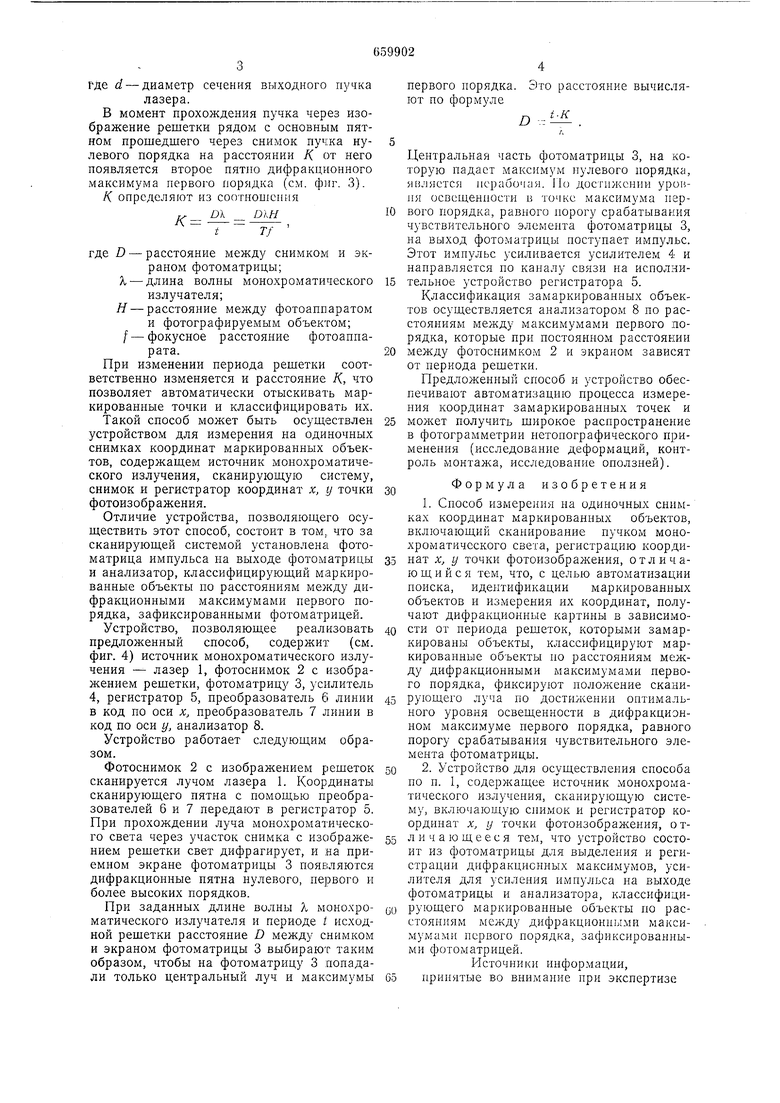
В момент прохождения пучка через изображение решетки рядом с основным пятном прошедшего через снимок пучка нулевого порядка на расстоянии /С от него появляется второе пятно дифракционного максимума первого порядка (см. фиг. 3). /С определяют из соотношения „ Z)X Для
где D - расстояние между снимком и экраном фотоматрицы; Я - длина волны монохроматического
излучателя; Н - расстояние между фотоаппаратом
и фотографируемым объектом; /-фокусное расстояние фотоаппарата.
При изменении периода решетки соответственно изменяется и расстояние К, что позволяет автоматически отыскивать маркированные точки и классифицировать их.
Такой способ может быть осуш;ествлен устройством для измерения на одиночных снимках координат маркированных объектов, содержаш;ем источник монохроматического излучения, сканирующую систему, снимок и регистратор координат х, у точки фотоизображения.
Отличие устройства, позволяюп,его осуществить этот способ, состоит в том, что за сканирующей системой установлена фотоматрица импульса на выходе фотоматрицы и анализатор, классифицирующий маркированные объекты по расстояниям между дифракционными максимумами первого порядка, зафиксированными фотоматрицей.
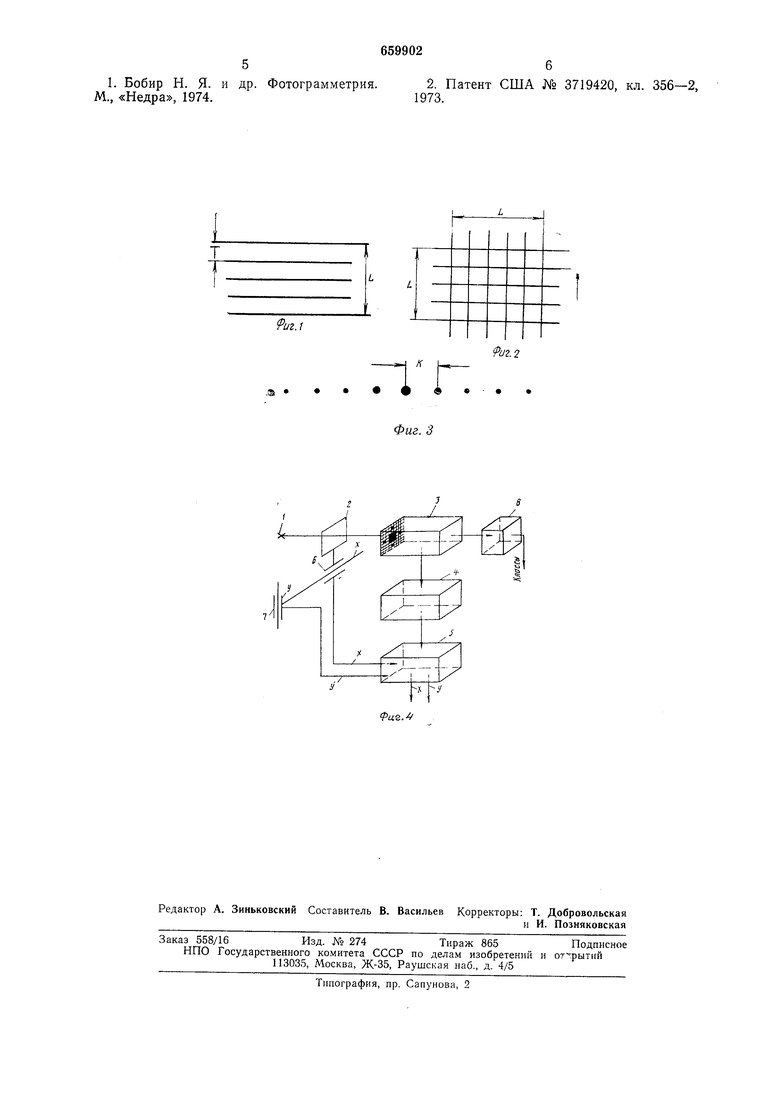
Устройство, позволяющее реализовать предложенный способ, содержит (см. фиг. 4) источник монохроматического излучения - лазер 1, фотоснимок 2 с изображением решетки, фотоматрицу 3, усилитель 4, регистратор 5, преобразователь 6 линии в код по оси X, преобразователь 7 линии в код по оси у, анализатор 8.
Устройство работает следующим образом.
Фотоснимок 2 с изображением решеток сканируется лучом лазера 1. Координаты сканирующего пятна с помощью преобразователей 6 и 7 передают в регистратор 5. При прохождении луча монохроматического света через участок снимка с изображением решетки свет дифрагирует, и на приемном экране фотоматрицы 3 появляются дифракционные пятна нулевого, первого и более высоких порядков.
При заданных длине волны Я монохроматического излучателя и периоде t исходной решетки расстояние D между снимком и экраном фотоматрицы 3 выбирают таким образом, чтобы на фотоматрицу 3 попадали только центральный луч и максимумы
первого порядка. Это расстояние вычисляют по формуле
/5..
X
Центральная часть фотоматрицы 3, на которую падает максимум нулевого порядка, является нерабочая. По достижении уровня освещенности в точке максимума первого порядка, равного порогу срабатывания чувствительного элемента фотоматрицы 3, на выход фотоматрицы поступает импульс. Этот импульс усиливается усилителем 4 и направляется по каналу связи на исполнительное устройство регистратора 5.
Классификация замаркированных объектов осуществляется анализатором 8 по расстояниям между максимумами первого порядка, которые при постоянном расстоянии
между фотоснимком 2 и экраном зависят от периода решетки.
Предложенный способ и устройство обеспечивают автоматизацию процесса измерения координат замаркированных точек и
может получить широкое распространение в фотограмметрии нетопографического применения (исследование деформаций, контроль монтажа, исследование оползней).
Формула изобретения
1. Способ измерения на одиночных снимках координат маркированных объектов, включающий сканирование пучком монохроматического света, регистрацию координат X, у точки фотоизображения, отличающийся тем, что, с целью автоматизации поиска, идентификации маркированных объектов и измерения их координат, получают дифракционные картины в зависимости от периода решеток, которыми замаркированы объекты, классифицируют маркированные объекты по расстояниям между дифракционными максимумами первого порядка, фиксируют положение сканирующего луча по достижении оптимального уровня освещенности в дифракционном максимуме первого порядка, равного порогу срабатывания чувствительного элемента фотоматрицы.
2. Устройство для осуществления способа по п. 1, содержащее источник монохроматического излучения, сканирующую систему, включающую снимок и регистратор координат X, у точки фотоизображения, отличающееся тем, что устройство состоит из фотоматрицы для выделения и регистрации дифракционных максимумов, усилителя для усиления импульса на выходе фотоматрицы и анализатора, классифицирующего маркированные объекты по расстояниям между дифракционными максимумами первого порядка, зафиксированными фотоматрицей.
Источники информации,
принятые во внимание при экспертизе 5 1 Бобир Н. Я. и др. М., «Недра, 1974. Фотограмметрия.2. Патент США № 3719420, кл. 356-2, 659902 6 1973.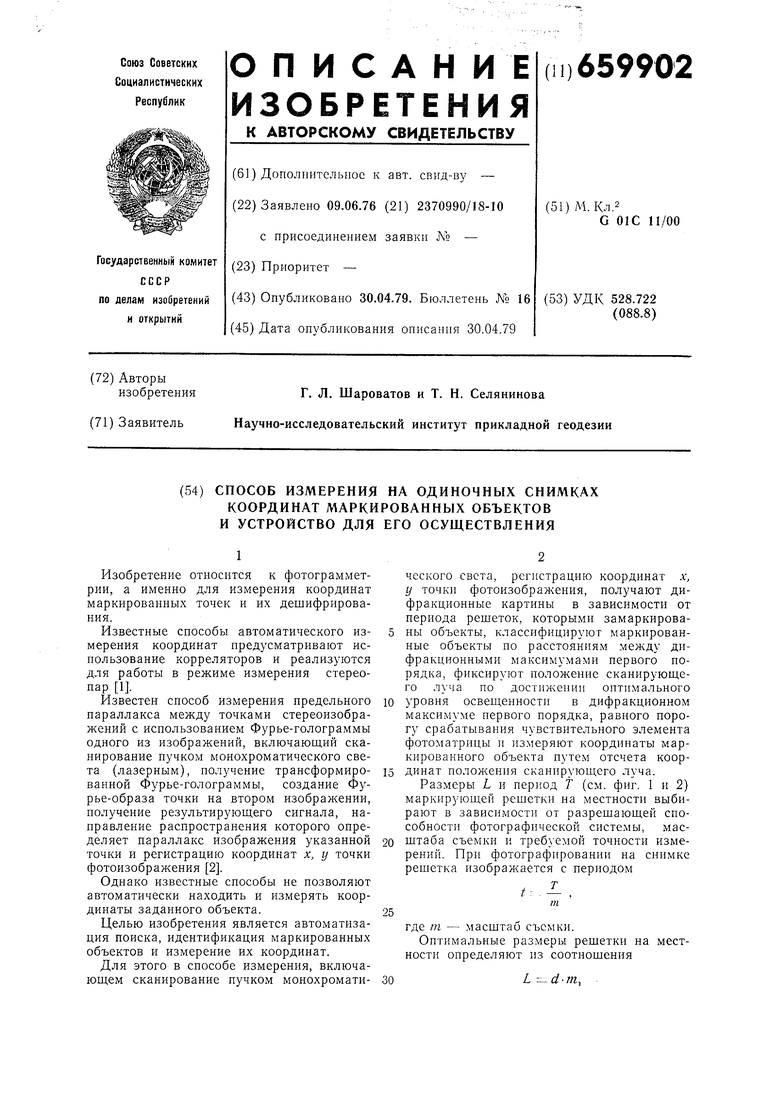
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для обработки изображений местности | 1984 |
|
SU1167428A1 |
| Устройство для определения точек равных высот по снимкам стереопары | 1987 |
|
SU1530903A1 |
| Способ визуализации полей фазовой оптической плотности в газовых и конденсированных средах и устройство для его осуществления | 2020 |
|
RU2752283C1 |
| Способ автоматического опознавания идентичных точек на снимках стереопары | 1978 |
|
SU741051A1 |
| ЦИФРОВОЙ СКАНИРУЮЩИЙ РЕНТГЕНОДИАГНОСТИЧЕСКИЙ АППАРАТ | 2002 |
|
RU2217055C1 |
| СПОСОБ ПОЛУЧЕНИЯ ЧЕТЫРЕХМЕРНЫХ ЯРКОСТНО-СПЕКТРАЛЬНЫХ ПРОФИЛЕЙ УДАЛЕННЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2023 |
|
RU2822085C1 |
| Способ выделения участков равного параллакса на снимках стереопары и устройство для его осуществления | 1976 |
|
SU655899A1 |
| Способ фотограмметрического определения кинематических параметров недеформирующегося объекта | 1982 |
|
SU1080015A1 |
| СПОСОБ ГРАДУИРОВКИ СПЕКТРА ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2119649C1 |
| НОСИТЕЛЬ ИНФОРМАЦИИ И УСТРОЙСТВО ДЛЯ ПРОВЕРКИ ЕГО АУТЕНТИЧНОСТИ | 1996 |
|
RU2175777C2 |
«
1Г
