Изобретение относится к измерительной технике, в частности к фотограмметрическому определению кинематических параметров недеформирующегося (твердого тела.
Известен способ изучения движения 5 недеформирукщегося (твердого) тела методом сТереофотограмметрии, включаквдий установку фотокамер, измерение базиса съемки, синхронное фотографирование двумя фотокамерами 10 объекта движения, измерение координат точек изображений объекта на стереопаре снимков, определение пространственных координат точек объекта на различные моменты времени и на- 15 хождение параметров движения по пространственным координатам 1.
Недостатком известного способа определения параметров движения является невысокая точность, обуслов- 20 ленная ошибками синхронизации затворов съемочных камер. Кроме того, точность определения углов поворота объекта зависит от размера объекта, при одной и той же точности определе-25 ния координат точек объекта точность определения углов поворота будет тем выше, чем по размерам объект будет больше.
Известен способ фотограмметрического определения параметров движения недеформирующегося о&ъекта,включающий маркирование точек опорной сети непосредственно на объекте,геодезическое определение координат замаркированных точек в системе координат объекта, перемещение опорной сети вместе с объектом, фотографирование объекта одной камерой, фиксирование интервалов времени, измерение координат точек изображений на снимке, образование кбазиснимков при условии относительного движения съемочной камеры к объекту съемки, определение элементов внешнего ориентирования каждого квазиснимка и нахождение по элемен- 45 там внешнего ориентирования параметров движения С23.
Недостатком данного способа является сложность процесса определения пространственных координат опорных 50 точек на объекте. Точность определения координат зависит от расстояния до объекта съемки. От точности создания опорной сети зависит точность определения кинематических па- 55 раметров фотограмметрическим способом.
Цель изобретения - упрощение процесса съемки и повышение точности определения кинематических параметров объекта.60
Поставленная цель достигается тем, что согласно способу фотограмметрического определения кинематических параметров недеформирующегося объекта, включающему в себя маркирование 5
точек на объекте, перемещение объекта с маркированными точками, фотографирование объекта в движении одной неподвижной съемочной камерой, фиксирование интервалов, времени, измерение координат точек изображений на снимках, образование квазиснимко при условии относительного движения съемочной камеры к объекту съемки, нахождение по элементам внешнего ориентирования квазиснимков кинематических параметров, устанавливают теодолит на заданном расстоянии от съемочной камеры, ориентируют оси теодолита параллельно осям системы координат объекта в его исходном состояний, измеряют горизонтальные и вертикальные углы на замаркированные точки неподвижного объекта, по измеренным углам образуют мнимый снимок, выполняют взаимное ориентирование полученного снимка с кадым квазиснимком и по элементам взаимного ориентирования находят элементы внешнего ориентирования каждо го квазиснимка.
На фиг. 1-3 представлена работа предлагаемого способа.
На поверхности объекта 1 в его неподвижном состоянии (1 позиция ;. объекта замаркированы ряд точек (фиг. 1 и 2, точки А,Б , С и т.д.К С объектом 1 связана система координат ОХУ2, начало которой в зависимости от условий эксперимента совмещается с полюсом вращения объекта, центром тяжести, центром масс или любой другой точкой, а оси )(, , Z параллельны или совпадают со строительными (конструктивными) осями объекта. Положения точек А, В, С и т.д. объекта 1, занимающего при движении позиции 2, 3, и т д., относительно системы координат OXyz остаются постоянными, т.е. объект 1 представляет собой недеформирующееся (твердое) тело.
До начала движения объекта 1 устанавливается съемочная камера 2, которая во время движения объекта и фотографирования остается неподвижной .
На некотором расстоянии (базиса/ от съемочной камеры 2 устанавливается теодолит 3. Теодолит 3 ориентируют таким образом, чтобы его оси X, У, Z были параллельны осям X, У, Z объекта 1 в его неподвижном состоянии (позиция 1/. Теодолитом 3 из1 ряются горизонтальные ct и вертикальные ft углы на точки А, В, С и т.д. объекта 1 (фиг. 2), За начальное направление для измерения горизонтальных углов d принимается направление, параллельное оси OZ объекта 1 или совпадающее с ним. По измеренным углам d к р, , задаваясь
координат макета ) также отмечен крестообразной маркой. Направление на начало системы координат макета выбрано- за начальное для измерения горизонтальных н вертикальных углов теодолитом. Измерение углов производится тремя приемами, расстояние от теодолита до мнимого снимка выбрано равным 200 мм и по измеренным углем рассчитаны координаты точек снимка. Расстояние от съемочной камеры до теодолита выбрано равным 4,5 м. В дальнейшем производится фотографирование съемочной камерой движущегося объекта на фотопластинки чувствительностью 130 ед. ГОСТ. Координаты изображений марок измерены на компараторе с точностью 0,007 мм. В дальнейшем проводится взаимное ориентирование снимков и по элементам взаимного ориентированна осущест-;
влен переход к элементам внешнего ориентирования каждого квазиснимка. По элементам вн инего ориентирования квазиснимков найдены кинематические параметры. Точность рпределения кинематических параметров 1-6%.
Таким образом, изобретение позволяет определять кинематические па|раметры с кясркой точност ; )о. На точность определения кинематических параметров влияет в основном только количество изобразившихся точек, по которым осуществляется взаимное ориентирование и их расположение на снике. Следовательно, всегда имеется воможность запроектировать так съемку, чтоОа получить наивысшую точность.
Предложенный способ не требует определения геодезических координат точек объекта, вследствие чего упрощается его реализация.

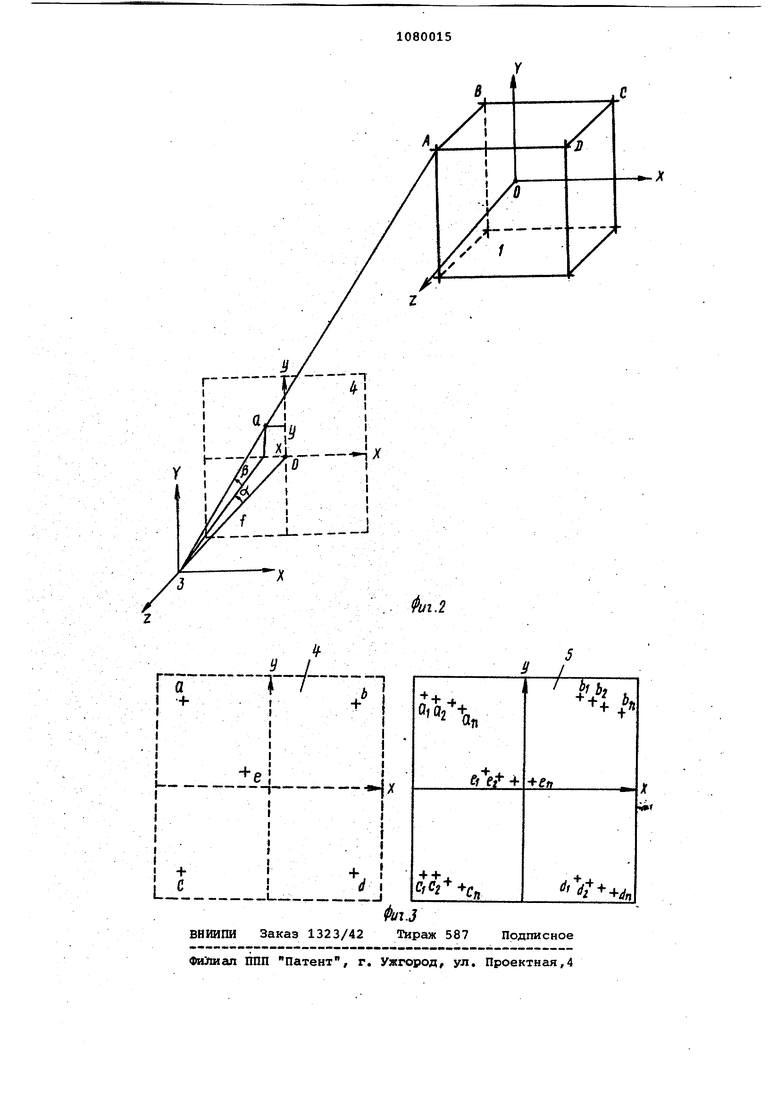
СПОСОБ ФОТОГРАММЕТРИЧЕСКОГО .ОПРЕДЕЛЕНИЯ КИНЕМАТИЧЕСКИХ ПАРАМЕТРОВ КЕДЕФОРМИРУКЯЦЕГОСЯ ОБЪЕКТА, включакмций в себя маркирование точек на Объекте, перемещение объекта с маркированными точками, фотографирование объекта в движении через заданные интервалы времени, измерение координат точек изображений на снимках, образование квазиснимков при условии относительного движения съемочной камеры к объекту съемки, нахождение по элементам внешнего ориентирования квазиснимков кинематических параметров, отличающийся тем, что, с целью упрощения процесса съемки и повышения точности определения кинематических параметров об ъе кт а, у ст ан авли вают теодолит на заданном расстоянии от съемочной камеры, ориентируют оси теодолита параллельно осям системы координат объекта в его исходном состоянии, измеряют горизонтальные и вертикальные углы на замаркированные точки неподвижного , по измеренным углам образуют мнимый снимок, выполняют взаимное ориентирование по(Л лученного снимка с каждым квазиснимком и по элементам взаимного ориентирования находят элементы внешнего ориентк-кования каждого квазиснимка.
2 позиция
1позии,ия Y
в
J позиция
Фиг.1
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Геодезия и аэросъемка | |||
| Итоги науки и техники, 1974, № 10, с | |||
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ фотограмметрического определения параметров движения недеформирующегося объекта | 1978 |
|
SU746186A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
