исходном состоянии н система работает в режиме слсЖеиня, то есть ири isp i-Sinin KOiiaH.nioro ва.та 1 но часовой стрс.тке на уеи; ите;1я 4 подается сигнал, кото1)ыП, допустим, совпадает но фазе с опорным , п nBHiaTe.Hj 10 вращается также но часовой стрелке. Тахогенератор 16 jaKJKe вращается по часовой етр(дке и вырабатывает сигнал скоростной обратной связи одной нолярности. Прн вращении командного вала 1 против часовой стрелки на вход уси.тителя 4 подается сигнал, который находится в нротивофазе с сигиа.юм, двигатель 10 и тахогенерагор 16 вращаются против часовой стрелки, нри этом Тахогенератор 16 вырабатывает сигпал противоположной полярности.
Доиуетим, что командный вал 1, вращаясь но чаеовой стрелке, вызывает в еиетеме формнрование управляюн1,его сигнала, который обеспечивает вращение выходного вала редуктора 11. В этом случае на вход усилителя 4 подается сигнал, который равен разности выходных сигналов датчика 2 н выходного вала редуктора 11 {7вх зад.-- С/отр.и фаза которого совпадает с фазой опорного сигнала.
С выхода усилителя 4 усиленный в /С раз сигнал нодается на детектор 6, с выхода которого снимается нульсирующее напр} жение, равное произведению входного сигнала детектора на суммарный коэффипиент Т нреобразования и передачи дс тектора, то есть
-выx.дeт A-L-BX--В результате вращения тахогенератора 16 па его выводах возникает напряжение сигнала екороетной обратной связи, которое суммируется в сумматоре 7 с выходным нанря кением детектора 6. Выходное напряжение модулятора 9 определяется выражением:
,
где TI - коэффициент нередачи блока 18
неременных коэффициентов и
корректирующего устройства 17.
Прн достаточном коэффициенте усиления
уенлнтеля 5 абсолютные значения
KTUsx-. и TiUoc мало отличаютея
друг от друга. Но в установившемея режиjvte всегда вьшолняется соотношение;
m,x,.,f/oc: .
Это значит, что на вход модулятора 9 подается разностный сигнал, полярность которого совпадает с полярностью выходного сигнала детектора 6. Модулятор 9 преобразует сигнал постоягшого тока в неременный и подает его на вход усилителя 5, который соединен с двигателем К).
При достижении выходным валом редуктора 11 предельного нравого положения, срабатывает ку. 12 и верхний контакт
концевого выключателя 14 размыкается, а верхний контакт концевого выключателя 1о замыкается. В резу,тьтате это1о, концевой выключ тель 14 устанавливает систему в такое ио.чожсние, ири котором она ciaiiuВ1ГГСЯ нечувствите.1)Ной к дойетву1он1ел: командному сигналу. Ток в обмотке двигателя прекращается. В результате замыкания верхнего контакта концевого вых,1ючателя 15 шунтируется резнетор в блоке переменных коэффнциентов 18 и его коэффициент передачи TI меняется так, что напряжение обратной связи становится много больше существующего, то ееть
Г,ос Г,ос ;
.х.сум -- - 7 jf/oc СО
Такое изменение коэффициента нередачц скоростной обратной связи эквивалентно
изменению фазы командного сигнала на противоно.тожную, д,1я которой система осталась чувствительиой.
Следовательно, двигатель 10, оказавшись иод нанряжен нс-м, фаза которого нротивоноложна существующей, развивает момент, противоположный еущеетвующему, систсма остаиавливается, напряжение обратной связи иечезает и в таком еостоянии система може1 находиться сколь угодно до.тго,
так как разомкнутый ве)хиий контакт концевого выключателя 14 еделал ее нечувствнтсльной к существующему сигналу, фаза которого совнадает с фазой опорного напряжения.
При вращении командной оси 1 против чаеовой стрелки, то ееть нри введении выходиой оеи в рабочую зону, на вход усилителя 4 подаетея , фаза которого иротивоиоложна фазе оиорного нанряжения.
Полярность выходного сигнала детектора 6 меняется на иротивоноложн то и двига1ель 10 начинает вращаться иротив часовой стрелки, так .как система с разомкнутым верхним контактом концевого выключателя 14 чувствительна только к сигналу, фаза которого противоноложна фазе опорного напряжения.
При вращении выходного вала редуктора 11 нротив часовой стрелки, с тахо.генератора 16 снимается сигнал, нолярност)
которого гфотнвоноложиа сигналу, существую1цем прп вращснии но часовой стре.тке.
Величииа вв1ходного напряжения еумматора 7 определится выражением:
.СумА./ ВХ :: J
то есть остается такой же, как и нри исходном положении контактов концевых выключателей 14 и 15. Двигатель 10 вращает выходной вал в иротивоноложном направлении и отводит кулачок 12 от нредельного положения, верхний контакт концевого выключателя 14 замыкается, верхний контакт концевого выключателя 15 размыкается. Система становится чувствительной к входному сигналу любой фазы (0° или 180°) и работает обычным cnoco6oj i.
При достижении выходным валом левого предельного положения срабатывает кулачок 13, нижний контакт концевого выключателя 14 размыкается, нижний контакт концевого выключателя 15 замыкается и система работает аналогичным образом.
В связи с тем, что усилительный тракт, преобразовательные каскады и тахогенератор с контуром обратной связи могут быть несимметричными, то для получения одинаковых динамических характеристик следящей системы При отработке заданного рассогласования в обе стороны резисторы блока переменных коэффициентов 18 могут быть выполнены в виде переменных.
Изменяя величину резисторов можно сделать следящую систему симметричной.
Использование предлагаемой следящей системы позволит унростить систему и за счет этого повысить ее надежность.
Формула изобретения
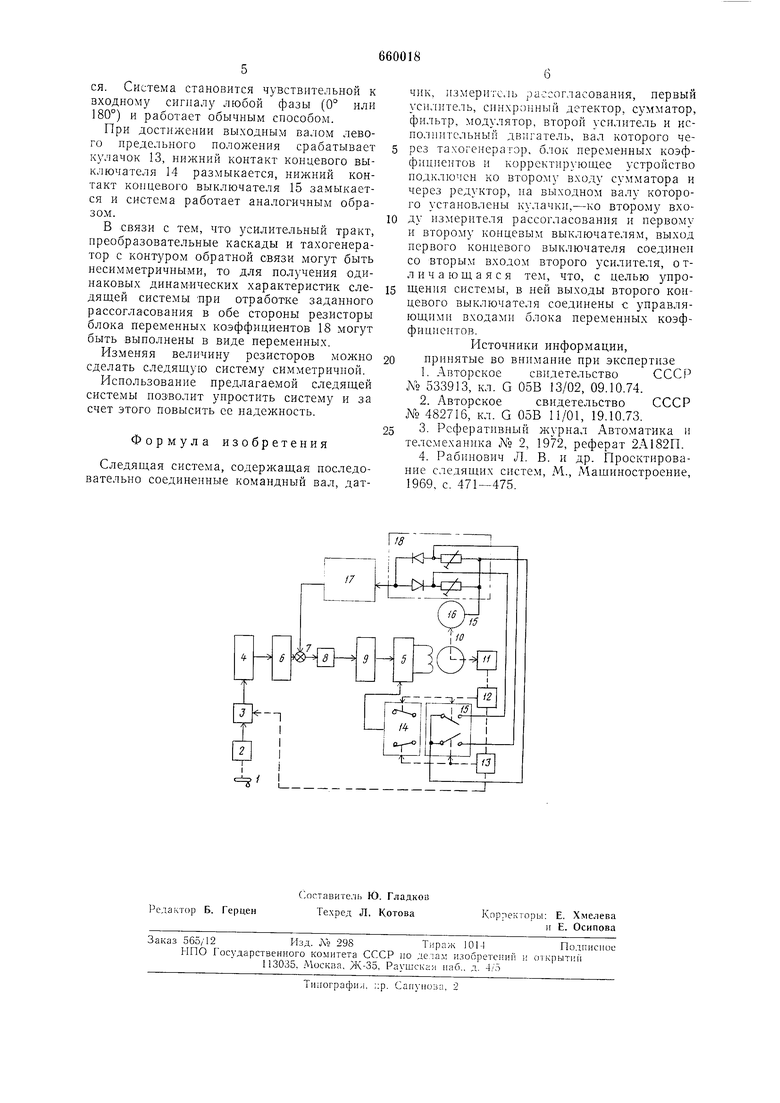
Следящая система, содержащая последовательно соединенные командный вал, датчик, измеритель рассогласования, первый усилитель, синхронный детектор, сумматор, фильтр, модулятор, второй усилитель и исполнительный дв11гатель, вал которого через тахогенератор, блок переменных коэффициентов и корректирующее устройство подключен ко второму входу сумматора и через редуктор, на выходном валу которого установлены кулачки,-ко втором} входу измерителя рассогласования и первому и второму концевым выключателям, выход первого концевого выключателя соединен со вторым входом второго усилителя, отличающаяся тем, что, с целью j npoщения системы, в ней выходы второго концевого выключателя соединены с управляющими входами блока переменных коэффициентов.
Источники информации, принятые во впимание при экспертизе 1. Авторское свидетельство СССР Ко 533913, кл. G 05В 13/02, 09.10.74.
2 Авторское свидетельство СССР jYo 482716, кл. G 05В П/01, 19.10.73.
3.Реферат 1вный журнал Автоматика и телемеханика jYo 2, 1972, реферат 2А182П.
4.Рабинович Л. В. и др. Ироектирование следящих систем, М., Мащиностроение, 1969, с. 471-475.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1978 |
|
SU744432A1 |
| Следящая система | 1972 |
|
SU447679A1 |
| Следящая система переменного тока | 1974 |
|
SU610061A1 |
| Следящая система | 1982 |
|
SU1118961A1 |
| Следящая система | 1987 |
|
SU1462236A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1993 |
|
RU2087026C1 |
| Следящая система | 1973 |
|
SU533912A1 |
| Электромеханический интегратор | 1976 |
|
SU604007A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1971 |
|
SU304551A1 |
| Устройство для испытаний механических элементов антенн | 1975 |
|
SU620939A1 |
