1
Изобретение относится к области управления ,и может быть использовано в устройствах автоматики и вычислительной техники, например в системах синхронной связи переменного тока с ограниченным углом поворота исполнительного вала и нерегулярным обновлением информации об угловых положениях входного вала системы.
Извесшы следящие системы переменного тока с ограниченным углом поворота выходного вала, в которых при входе входного вала в запретную зону исполнительный двигатель обесточивается и выходной вал останавливается на границе запретной зоны 1 .
В таких системах при независимом враще,нии входного вала и нерегулярном электрическО,м подключении к исполнительной системе командного датчика, механически сопряженного с входным валом, в момент принятия системой указания по углу исполнительный двигатель системы ведет выходной вал в заданное положение кратчайшим путем как через рабочую зону, так и через зону запрета, в зависимости от фазы разностного сигнала на входе усилителя.
В случае движения выходного вала в сторону запретной зонь при достижении им предельного положения срабатътает концевой выключатель, двигатель обесточивается, выходной вал системь останавливается на границе рабочей зоны, н система не .может отработать заданного угла без вмешательства оператора, который известными средствами приводит систему в согласованное положение.
10
Наиболее близкой по технической сущности к предлагаемой, является система, содержащая синусно-косинусные вращающиеся трансформаторы - датчик и приемник, первый и второй, усилители, первый детектор, сумматор, модуляISтор, двигатель, тахогенератор, корректирующее звено, редуктор, блок концёдых выключателей и выходной шнусно-косинусный вращающийся трансформатор - датчик угла поворота выходного вала системы. 2.
20
Однако известная система имеет низкое быстродействие.
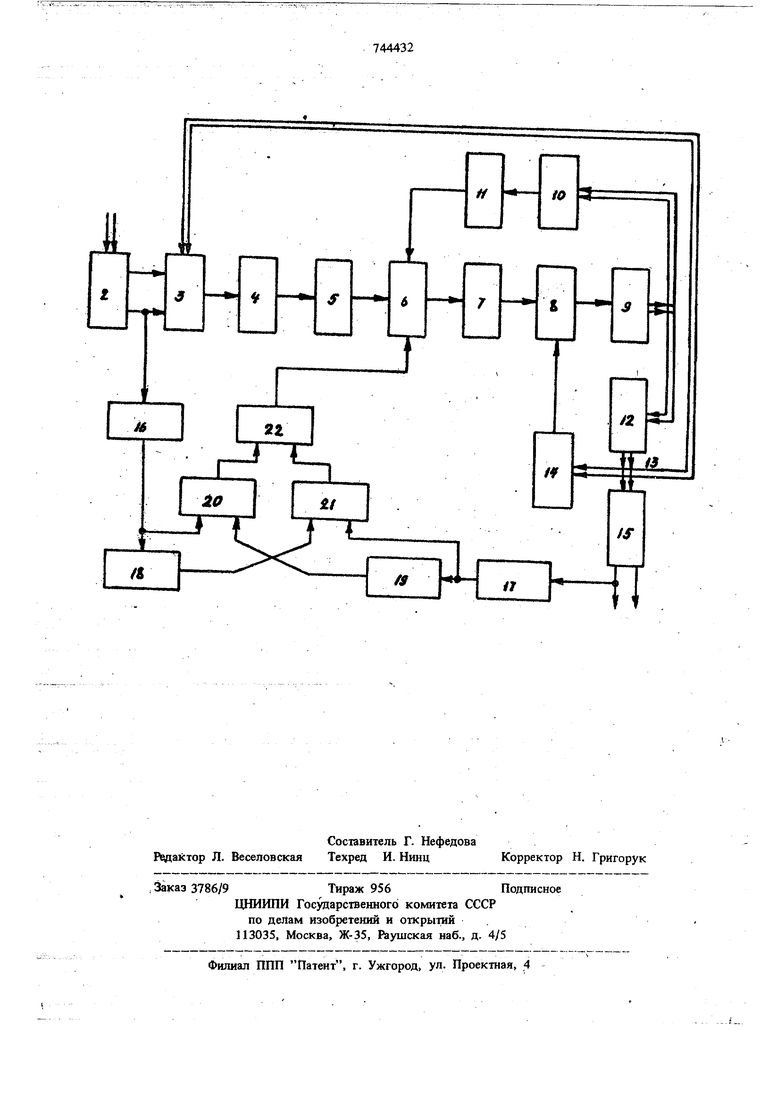
Цель изобретения - повыщение быстродействия системы. 3744 Поставленная цель достигается тем, что в систему введены второй и третий детекторы, два инвертора, два элемента И и третий усилитель, ко входам которого подключены выходы элементов И, первьш и вторые входы которых подсоединены соответственно ко входу и выходу первого и второго инверторов, входы которых через второй и третий детекторы подключены соответственно ко входу приемника и выходу датчика угла поворота выходного вала системы, а выход третьего усилителя соединен с третьим входом сумматора. На чертеже представлена блок-схема системы Система содержит входной вал 1, датчик 2, приемник 3, первый усилитель 4, первый детектор 5, сумматор 6, модулятор 7, второй усилитель 8, исполнительный двигатель 9, тахогенератор 10, корректирующее звено 11, редуктор 12, выходной вал 13 системы, блок 14 концевых выключателей, датчик 15 утла поворота выходного вала системы, второй и третий детек торы 16, 17, первый и второй инверторы 18, 19, первый 20 и второй 21 элементы И, третий усилитель 22. В процессе синхронного слежения в рабочей зоне система работает обычно, то есть при вращении входного вала 1 против часовой стрелки разностный сигнал на выходе приемника 3 находится в противофазе с опорным, с выхода детектора 5 снимается отрицательный сип{ал и подается la первый вход сумматора 6, на второй вход которого подается сигнал отрицательной обратной связи с выхода корректирующего звена 11. С выхода датчика на вход модулятора 7 также прюсодит уменьшенный на величину сигаала отрицательной обратной связи отрицательный сигнал, и исполнительный двигатель 9 ведет выходной вал 13 против часовой стрелки, а при вращегаш входного вала 1 по часовой стрелке разностный сигнал с выхода приемника 3 совпадает по фазе с опорным с выхода детектора 5 снимается положительный сигнал, с выхода сумматора 6 на вход модулятора 7 приходит положительный сигнал, и двигатель 9 ведет выходной вал 13 по часовой стрелке. ЕСЛИ в момент принятия указания по углу, т.е. в момент электрического включения датчика 2 (или приемника 3), выходной вал 13 находится вблизи правой границы рабочей зоны (в третьей четверти- окружности), входной вал 1 - вблизи левой границы этой зонь (во второй четверги окружности), при этом запретная зона 27 расположена симметрично во второй и третий четвертях окружности (тг ± у), а напряжение, Снимаемое с синусного выхода датчика 2,совпадает по фазе с опорный , а напряжение, снимаемое с синусного выхода выходего датчика 15, находится в противофазе с порным, то с выхода детектора 16 снимается сигнал положительной полярности, так как сиус угла в первой и второй четвертях положителен, а с выхода детектора 17 снимается отриательный сигаал, так как синус угла в третьей ичетвертой четвертях имеет отрицательное значение. Положительный сигнал с выхода де7ектора 16 подается на первый вход первого элемента 20 И и через инвертор 18, уже отрицательной полярности, - на первый вход второго элемента 21 И. Отрицательный сигнал с выхода детектора 17 подается на второй вход элемента 21 И и через инвертор 19 уже положительной полярности - на второй вход первого элемента 20 И . Так как элементы 20, 21 И срабатьтают только при совпадении положительных сигналов, то на неинвертирующем входе усилителя 22 появляется отрицательный сигнал с выхода элемента 20 И, поскольку на первом и втором входах этого элемента присутствуют положительные сигналы. С выхода усилителя 22 отрицательный сигнал подается на третий вход сумматора 6 и, так как этот сигнал выбран большим на величину сигнала насыщения усилителя 8 (с учетом сигнала отрицательной обратаой связи), чем максимально возможный сигнал с выхода детектора 5, то с выхода сумматора 6 на вход модулятора 7 также подается отрицательное напряжение, под действием которого двигатель 9 начинает вращаться с максимальной скоростью против часовой стрелки и ведёт выходной вал 13 на кратчайшим путем через запретную зону, а через рабочую зону. При достижении выходным валом 13 близкого к нулю положения сигнал с детектора 17 становится настолько малым, что элемент 20 И устанавливается в исходное состояние, в результате чего пост пление отрицательного сигнала с выхода усилителя 22 на третий вход сумматора 6 прекращается. Однако в этом положении выходного вала 13 управляющий разностный сигнал с выхода приемника 3 уже находится в противофазе с опорным, так как величина оставшегося неотработанного угла меньше гг по крайней мере на величину угла j половинной ЗОНЬ запрета, даже в случае, если входной вал установлен на границе рабочей зоны. Таким образом, достигнув нулевого положения, система начинает управляться разностным сигналом с выхода приемника 3, который определяет посту1 ление с выхода детектора 5 на первый вход сумматора 6 отрицательного напряжения, и двигатель 9 продолжает вести выходной вал 13 с прежней скоростью против часовой стрелки, т.е. в сторону согласованного с входным валом положения. После прохода выходным валом 13 нулевого положейия и входа его в первую четверть окружпосш на выходе ,м,етектора 17 появляется сигнал иодожигольной полярности, так как синус в иериой четверти имеет положительное зна чение, ни один из элементов 20,21 И не срабатывает из-за несовпадения положительных сигна лов на их входах, и двигатель 9 управляется си налом рассогласования, снимаемым с выхода приемника 3, до полной отработки скомавдова кого угла. Если система принимает указание по углу в тот момент, когда выходной вал 13 находится во второй четверти, а выходной вал 1 в третьей, то с выхода, детектора 16 снимается сигнал отрицательной полярности и через инвертор 18 (положительный) подаетс{С на первый вход второго элемента 21 И, с выхода детектора 17 снимается положительный сигнал и подается на второй вход второго элемента 21 И. Совпадение двух положительных сигналов на входах переводит элемент 21 И из исходного в рабочее состояние, в .результате чего на инвертирующем входе усилителя 22 появляется отрицательное напряжение. С выхода усилителя 22 положительное напряжение подается на третий вход, сумматора 6 и под его воздействием двигатель 9 вращает выходной вал 13 по часовой стрелке, ведя его из второй через первую и четвертую четверти в третью, т.е. система идет не кратчайщим путем через зону запрета, а через рабочую зону. Если в момент принятия указания по углу входной и выходной валы находятся в одной четверти окружности и с детекторов 16, 17 снимаются сигналы одинаковой полярности, так как фазы напряжений, снимаемых с синусных выходов датчиков 2, 15,совпадают и знаки синусов углов одинаковы, то на-входах элементов 20, 21 И нет совпадения положительных сигналов, элементы остаются в исходном состоянии, третий вход сумматора 6 обесточивается и двигатель 9 управляется разностным сигналом с приемника 3. . Таким образом, в предлагаемой .системе за счет введения дополнительных элементов в случае несовпадения фаз напряжений с синусных выходов входного и выходного датчиков срабатывает соответствующий элемент И, и исполнительный двигатель управляется сигналом, снимаемым с выхода введенного усилителя, а в случае совпадения фаз указанных напряжений управление двигателем осущестзляегся сигналом рассогласования системы. После отработки выходным валом 13 заданного угла датчик 2 может быть отключен и система, которая замкнута по скорости выходного вала с помощью тахогенератора 10 и корректирующегозвена И, переходит в режим запоминания принятого угла. Кроме того, предлагаемая система может управляться оператором с помощью не показанного на схеме датчика команд, выход которого может быть включен в усилительно-приобразовательный тракт системы, а к датчику 15 подключается вход силового привода или регулируемый объект. Применение предлагаемой системы исключает необходимость участиа оператора в режимах включения и приема указаний по углу. Формула изобретения Следящая система, содержащая последовательно соединенные датчик, приемник, Первый усилитель, первый детектор, сумматор, модулятор, второй усилитель, исполнительный двигатель, вал которого через тахогенератор и корректирующее звено соединен со вторым входом сумматора, и через редуктор с выходным валом системы, вторым входом приемника, датчиком угла поворота выходного вала системы и блоком концевых выключателей, выход которого соединен со вторым входом второго усилителя, отличающаяся тем, что, с целью повыщения быстродействия, в нее введены второй и третий детекторы, вда инвертора, два элемента И и третий усилитель, ко входам которого подключены выходы элементов И, первые и вторые входы которых подсоединены соответственно ко входу и выходу первого и второго инверторов, входы которых через второй и третий детекторы подключены соответстве1шо к входу приемника и выходу датчика угла поворота выходного вала системы, а выход третьего усилителя соединен с третьим входом сумматора. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 304551, кл. G 05 В 11/14, 3.04.70. 2..Авторское свидетельство СССР ° заявке № 2414310/18-24, кл. G 05 В 11/01, 1977.

| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1982 |
|
SU1118961A1 |
| Следящая система | 1987 |
|
SU1462236A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1993 |
|
RU2087026C1 |
| Преобразователь угла поворота валаВ КОд | 1979 |
|
SU840998A1 |
| Задающее устройство следящего электропривода | 1982 |
|
SU1056129A1 |
| Интегрирующий привод | 1974 |
|
SU467325A1 |
| СИСТЕМА ДЛЯ ИДЕНТИФИКАЦИИ ОБЪЕКТОВ | 2003 |
|
RU2276796C2 |
| СПОСОБ УПРАВЛЕНИЯ ВИНТОВЫМ МЕХАНИЗМОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2013798C1 |
| Измерительное устройство к балансировочному станку | 1987 |
|
SU1415092A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОЙ БЛОКИРОВКИ ВЫХОДА ВОЗДУШНЫХ И МОРСКИХ ПОДВИЖНЫХ ОБЪЕКТОВ ЗА РАЗРЕШЕННУЮ ЗОНУ И ВХОДА ИХ В ЗАПРЕТНЫЕ ЗОНЫ | 2006 |
|
RU2321044C2 |