1
Изобретение относится к электромеханическим следящим системам.
Известна следящая система, в которой вне рабочих углов следящего вала исполнительный двигатель отключается концевыми выключателями, а торможение двигателя осуществляется пружинным механическим упором
1.
Недостатками этой следящей системы являются неэффективность торможения, отсутствие возможности автоматического возврата в зону рабочих углов при изменении знака сигнала рассогласования.
Известна следящая система, в которой вне рабочих углов следящего вала в цепь управления исполнительным двигателем подается ослабленный сигнал для его движения в сторону упора. Величина сигнала определяется допустимым нагревом исполнительного двигателя, остановленного на концевом упоре 2.
Однако работа исполнительного элемента под током в заторможенном состоянии приводит к его нагреву, преждевременным износу и выходу из строя.
Наиболее близкой по технической сущности к предлагаемой является система, содержащая первый источник питания, измеритель рассогласования, первый вход которого соединен с входным валом, второй вход - с выходным валом, а выход - с первым входом
усилителя, второй и третий входы которого соединены соответственно с выходами первого и второго корректирующих устройств, а первый и второй выходы соединены через размыкающие контакты первого и второго концевых выключателей с соответствующими обмотками управления первой и второй электромагнитных муфт, второй источник питания, который через замыкающие контакты первого
и второго концевых выключателей соединен с обмотками первого и второго реле, приводной двигатель, который через первую и вторую электромагнитные муфты и редуктор соединен с выходным валом, а редуктор соединен с входом тахогенератора 3.
Для операции останова и последующего возврата такой следящей системы в зону рабочих углов требуются дополнительные элементы - фазочувствительное реле и тормозная муфта.
Цель изобретения - упрощение следящей системы.
Это достигается тем. что в предлагаемой следящей системе первый источник питания
соединен с измерителем рассогласования через параллельно соединенные размыкаюипге контакты первого реле и замыкающие контакты второго реле, выход тахогенератора соединен с входами первого и второго корректирующих
устройств через размыкающие и замыкаюпще
контакты первого реле соответственно, размыкающие контакты второго реле соединены параллельно с размыкающими контактами концевых выключателей.
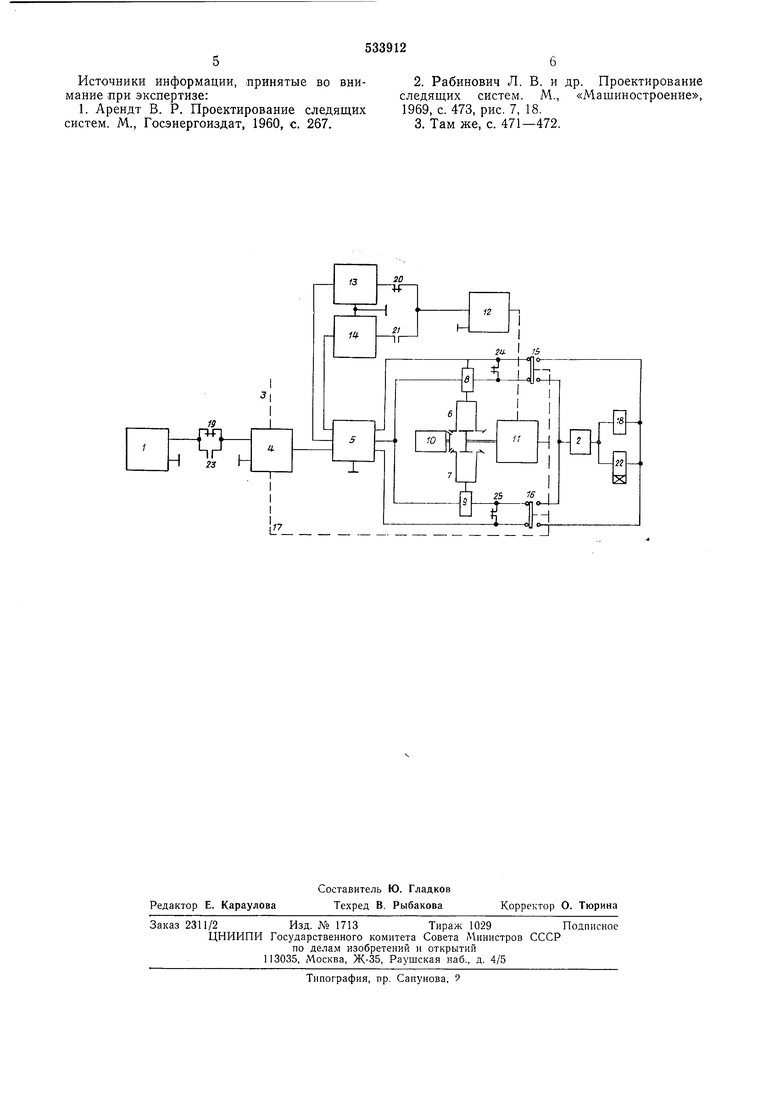
На чертеже представлена блок-схема предлагаемой следящей системы.
Следящая система содержит первый и второй источники питания 1, 2, входной вал 3, измеритель рассогласования 4, усилитель 5, первую и вторую электромагнитные муфты 6, 7, обмотки управления 8, 9 первой и второй электромагнитных муфт, приводной двигатель 10, редуктор 11, тахогенератор 12, первое и второе корректирующие устройства 13,
14,размыкающие и замыкающие контакты первого и второго концевых выключателей 15, 16, выходной вал 17, первое реле 18 с контактами 19, 20, 21, второе реле 22 с контактами 23, 24, 25.
Следящая система работает следующим образом. В зоне рабочих углов выходного вала 17 контакты концевых выключателей находятся в замкнутом положении, замыкая тем самым цепь подачи сигнала управления на обмотки возбуждения 8, 9 электромагнитных муфт. Первое реле 18 своими замкнутыми контактами 19 и 20 соединяет источник питания с измерителем рассогласования 4 и выключает позиционное корректирующее устройство 13. Таким образом обеспечивается необходимое соединение элементов следящей системы, отрабатывающей рассогласование между входным и выходным валами.
На границе зоны рабочих углов включается один из концевых выключателей, например первый, и своими контактами разрывает цепь управления первой электромагнитной муфты 6, замьжает цепь питания реле 18 и 22. Контакты 19, 20, 21 реле 18 при этом включают цепь питания измерителя рассогласования 4 и корректирующего устройства 13 и замыкают цепь скоростного корректирующего устройства 14; замкнутая по скорости выходного вала следящая система останавливается. Второе реле 22 имеет выдержку времени, соответствующую времени торможения выходного вала 17.
Таким образом, после останова выходного вала следящая системы замыкается цепь питания измерителя рассогласования 4 контактами 23 и происходит отключение от усилителя 5 обмотки управления электромагнитной муфты 6. При этом фаза сигнала рассогласования такова, что электромагнитная муфта 7, цепь управления которой замкнута контактами второго концевого выключателя 16, обесточена. При изменении фазы сигнала рассогласования приводной двигатель 10 через включенную .муфту 7 и редуктор 11 поворачивает выходной вал 17 в зону рабочих углов. Отключается первый концевой выключатель
15,замыкаются его нормально замкнутые, контакты, и следящая система возвращается в исходное состояние. Процесс торможения привода и его параметры - время и тормозной путь - зависят (при прочих равных условиях) от вида корректирующего устройства 14.
В зависимости от требований к параметрам торможения возможны следующие варианты выполнения корректирующего устройства.
Iвариант. Муфтовый привод скорректирован для работы в зоне рабочих углов с потерей порядка астатизма. В этом случае корректирующее устройство 14 (МОжет не понадобиться, так как скоростная обратная связь обеспечивается корректирующим устройством 13, которое остается постоянно включенным.
IIвариант. Муфтовый привод скорректирован с сохранением астатизма второго порядка; корректирующее устройство 14 представляет собой делитель напряжения.
IIIвариант. Требуется получить минимальные время и тормозной путь. В этом случае
необходимо реализовать оптимальный по быстродействию переходный процесс; это требует применения корректирующего устройства 14 с релейной характеристикой. Применение данной схемы коммутации корректирующих устройств в следящей системе позволяет исключить фазочувствительное реле и тормозную муфту и тем самым упростить электронную аппаратуру и редуктор следящей системы. Вследствие уменьщения радиоэлементов и исключения тормозной муфты повышается надежность следящей системы.
Формула изобретения
Следящая система, содержащая первый источник питания, измеритель рассогласования, первый вход которого соединен с входным валом, второй вход - с выходным валом, а выход - с первым входом усилителя, второй и третий входы которого соединены соответственно с выходами первого и второго корректирующих устройств, а первый и второй выходы соединены через размыкающие контакты первого и второго концевых выключателей с соответствующими обмотками управления первой и второй электромагнитных муфт, второй источник питания, который через замыкающие контакты первого и второго концевых выключателей соединен с обмотками первого и второго реле, приводной двигатель, который через первую и вторую электромагнитные муфты и редуктор соединен с выходным валом, а редуктор соединен с входом тахогенератора, отличающаяся тем, что, с целью упрощения следящей системы, в ней первый источник питания соединен с измерителем рассогласования через параллельно соединенные размыкающие контакты первого реле и замыкающие контакты второго реле, выход тахогенератора соединен с входами первого и второго корректирующих устройств через размыкающие и замыкающие контакты первого реле соответственно, размыкающие контакты второго реле соединены параллельно с размы.кающими контактами концевых выключателей.
Источники информации, принятые во внимание .при экспертизе:
1. Арендт В. Р. Проектирование следящих систем. М., Госэнергоиздат, 1960, с. 267.
2.Рабинович Л. В. и др. Проектирование следящих систем. М., «Машиностроение, 1969, с. 473, рис. 7, 18.
3.Там же, с. 471-472.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1976 |
|
SU660018A1 |
| Устройство для испытаний механических элементов антенн | 1975 |
|
SU620939A1 |
| Двухканальная следящая система | 1984 |
|
SU1241188A1 |
| Регулятор давления для насосной станции магистрального трубопровода | 1979 |
|
SU773585A1 |
| Устройство для отработки заданногоположения регулирующего органа | 1973 |
|
SU508779A1 |
| Устройство для синхронизации объектов | 1975 |
|
SU607180A1 |
| Стенд для испытаний рулевых механизмов | 1988 |
|
SU1548693A1 |
| Следящая система | 1983 |
|
SU1120280A1 |
| Устройство для ввода данных | 1979 |
|
SU842760A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО С ЭЛЕКТРОТЯГОЙ | 1992 |
|
RU2022824C1 |
