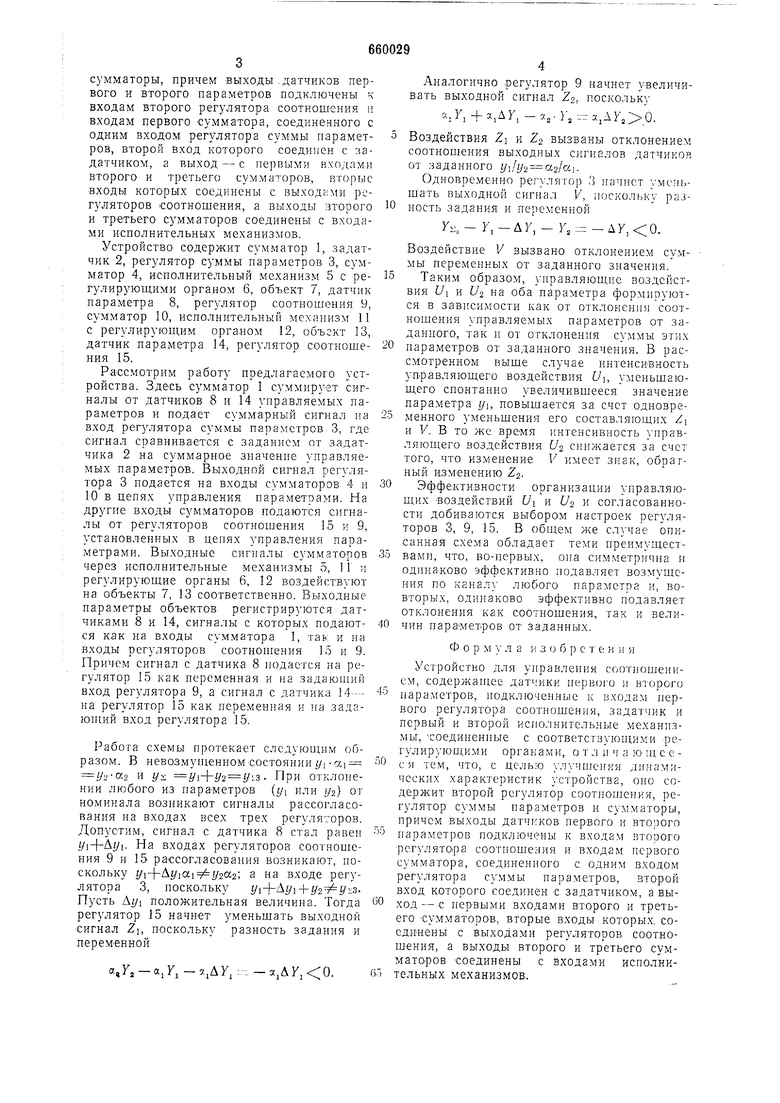
С)мматоры, причем выходы .датчиков первого и второго параметров подключены к входам второго регулятора соотношения и входам первого сумматора, соединенного с одним входом регулятора суммы параметров, второй вход которого соединен с задатчиком, а выход - с первыми входами второго и третьего сумматоров, вторые входы которых соединены с выходами регуляторов Соотношения, а выходы второго и третьего сумматоров соединены с входами исполнительных механизмов. Устройство содержит сумматор 1, задатчик 2, регулятор суммы параметров 3, сумматор 4, исполнительный механизм 5 с регулируюш,ими органом 6, объект 7, датчик параметра 8, регулятор соотношения 9, сумматор 10, исполнительный механизм 11 с регулирующим орга.ном 12, объгкт 13, датчик параметра 14, регулятор соотношения 15. Рассмотрим работу предлагаемого устройства. Здесь сумматор I суммирует сигналы от датчиков 8 и 14 управляемых параметров и подает суммарный сигнал па вход регулятора суммы параметров 3, где сигнал сравнивается с заданием от задатчика 2 на суммарное значение управляемых параметров. Выходной сигнал регулятора 3 подается на входы сумматоров 4 и 10 в цепях управления параметрами. На дрЗТие входы сумматоров подаются сигналы от регуляторов соотношения 15 и 9, установленных в цеиях управления параметрами. Выходные сиг}галы сумматоров через исполнительные механизмы 5, 1Г ;: регулирующие органы 6, 12 воздействуют на объекты 7, 13 соответственно. Выходные параметры объектов регистрируются датчиками 8 и 14, сигналы с которых подаются как на входы сумматора 1, так и на входы регуляторов соотнопшния 15 и 9. Причем сигнал с датчика 8 подается на регулятор 15 как переменная и на задаюп1ий вход регулятора 9, а сигнал с датчика 14-на регулятор 15 как переменная и па задаЮП1ИЙ вход регулятора 15. Работа схемы протекает следуюииш оОразом. В невозмун1енном состоянии г/1 с(,1 у.2-а.ч и у i/,-j-j/2 J/L3. При отклонении любого из параметров (у или ijz) от номинала возникают сигналы рассогласования на входах всех трех регуляторов. Допустим, сигнал с датчика 8 стал равеп i/i+Ayi. На входах регуляторов соотнощения 9 и 15 рассогласования возникают, поскольку i/i-4-Az/iai r/2«2; а на входе регулятора 3, поскольку У|+Дг/1-Ь1/2 й г/.з. Пусть Дг/1 положительная величина. Тогда регулятор 15 начнет уменьшать выходной сигнал Zi, поскольку разность задания и переменной а,7, - а, KI - а,Д У, :.-. - (,ЛК ( Аналогично регулятор 9 начнет увеличивать выходной сигнал Z, ПОСКОЛЬКУ а,Г,+а,ДГ, -а,.}-, .,ЛГ,0. Воздействия Z и Z вызваны отклонением соотношения выходных сигналов датчиков от заданного l/i/l/2 a2/a|. Одновременно регулятор 3 начнет уменьшать выходной сигнал V, поскольку ,. - у, ДГ,-Г, -ДУ,0. Воздействие У вызвано отклонением суммы переменных от заданного значения. Таким образом, управляющие воздействия t/i и f/2 на оба параметра формируются в зависимости как от отклонения соотношения управляемых параметров от заданного, так 1 от отклонения суммы этих параметров от заданного значения. В рассмотренном выше случае интенсивность управляющего воздействия U, уменьшающего спонтанно увеличивщееся значение параметра г/, повышается за счет одновременного зменьшения его составляющих /i и У. В то же время интенсивность управляюшего воздействия U снижается за счет того, что изменение V имеет знак, обратный изменению Zz. Эф-фективности организации управляющих воздействий Hi и Uz и согласованности добиваются выбором настроек регуляторов 3, 9, 15. В общем же случае описанная схема обладает теми преимуществами, что, во-первых, она симметрична и одинаково эффективно подавляет возмущепия по каналу любого параметра и. вовторых, одинаково эффективно подавляет отклонения как соотнощения, так и величин параметров от заданных. Ф о р м у л а и 3 о б р с т е н и я Устройство для управления соотношением, содержап1ее датчики иерво1-о и второго параметров, подключенные к входам первого регулятора соотношения, задатчик и первый и второй исполнительные механизмы, соединенные с соответст зуюп1,ими регулируюп1,ими органами, о т л и ч а ю щ е е си тем, что, с целью улучпкчгия динамических характеристик устройства, оно содержит второй регулятор соотношения, регулятор суммы параметров и сумматоры, причем выходы датчиков первого и второго параметров подключены к входам второго регулятора соотпошения и входам первого су.мматора, соединенного с одним входом регулятора суммы нараметров, второй вход которого соединен с задатчиком, а выод- с первыми входами второго и третьего сумматоров, вторые входы которых, соеди«ены с выходами регуляторов соотноения, а выходы второго и третьего сумато.ров соединены с входами исиолниельных механизмов.
56
Источники информации,Мелюшев. Основы автоматики и автоматипринятые во внимание при экспертизезации химических производств. М., «Маши. А. В. Казаков, М. В. Кулаков, Ю. К. нестроение, 1970. с. 321.
660029
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования толщины полосы на прокатном стане | 1991 |
|
SU1794518A1 |
| СПОСОБ УПРАВЛЕНИЯ ДВУХКАСКАДНЫМ ОБЪЕКТОМ С ЗАПАЗДЫВАНИЕМ | 1991 |
|
RU2012032C1 |
| СПОСОБ КАСКАДНОГО РЕГУЛИРОВАНИЯ ТЕХНОЛОГИЧЕСКОГО ПАРАМЕТРА ТЕПЛОЭНЕРГЕТИЧЕСКОГО ОБЪЕКТА | 1991 |
|
RU2049290C1 |
| Устройство для программного управления температурным режимом химического реактора | 1980 |
|
SU912262A1 |
| Система автоматического регулирования процесса газосмешения | 1990 |
|
SU1786471A1 |
| АВТОМАТИЧЕСКИЙ РЕГУЛЯТОР ТЕМПЕРАТУРЫ ПЕРЕГРЕТОГО ПАРА В ПАРОГЕНЕРАТОРЕ | 1991 |
|
RU2044216C1 |
| Система регулирования объектов высокого порядка с запаздыванием | 1989 |
|
SU1667002A1 |
| Устройство для регулирования соотношения компонентов смеси | 1982 |
|
SU1124264A1 |
| Система управления процессом измельчения в мельнице замкнутого цикла | 1989 |
|
SU1694221A1 |
| РЕГУЛЯТОР ДАВЛЕНИЯ ПЕРЕГРЕТОГО ПАРА В МНОГОТОПЛИВНОМ ПАРОГЕНЕРАТОРЕ | 1991 |
|
RU2044214C1 |
.
Ж
- .;/ л/Уг-о ; //
