Изобретение используется в теплотехнике при автоматизации теплоэнергетических объектов каскадным регулированием.
Известен способ каскадного регулирования [1] в котором сигнал задания регулируемой величины и сигнал текущего значения регулируемой величины поступают на вход регулятора. При отклонении регулируемой величины выходной сигнал регулятора поступает на вход интегратора (интегрируется). Недостаток этого способа заключается в том, что возмущения, вносимые изменением нагрузки существенно увеличивают время переходного процесса.
Известен способ каскадного регулирования технологического параметра теплоэнергетического объекта [2] в котором сигнал задания регулируемого параметра дифференцируется с постоянной времени, величина которой зависит от нагрузки объекта и при нагрузке объекта меньше заданной величины, соответствующим образом корректируется регулирующее воздействие. Недостатком этого устройства является то, что параметры динамической настройки регулятора не зависят от внутренних возмущений в объекте, наличие которых увеличивает длительность переходных процессов, ухудшает динамическую точность регулирования.
Цель изобретения повышение динамической точности регулирования при внутренних возмущающих воздействиях в теплотехническом объекте.
Цель достигается тем, что в способе каскадного регулирования путем изменения положения регулирующего органа по динамически преобразованной сумме отклонения стабилизируемой величины от заданного значения и корректирующего сигнала, пропорционального динамически преобразованному сигналу отклонения регулируемого параметра от сигнала задания, сигнала коррекции по дифференциальному сигналу задания при нагрузке объекта меньше заданной, вычисляют производную от текущего значения регулируемого параметра и отношение между производной заданного значения регулируемого параметра и производной измеренного текущего значения регулируемого параметра и по этому отношению формируют коэффициент динамической настройки суммы сигналов отклонения стабилизируемой величины от заданного значения и корректирующего сигнала. Отношение производной задания к производной текущего значения регулируемой величины зависит не только от нагрузки, которая является внешним возмущением, но зависит и от внутренних возмущений в регулируемом объекте. Чем больше соотношение производных, тем больше постоянная времени регулируемого объекта и требуется увеличение коэффициента динамической настройки. Если увеличение соотношения производных обусловлено большей скоростью изменения задания, то также возникает необходимость в увеличении коэффициента динамической настройки. Введение коэффициента динамической настройки по соотношению производных сигнала задания и сигнала текущего значения регулируемого параметра позволило адаптировать регулятор не только по измененному сигналу задания, но и по значению внутренних параметров объекта, что повысило быстродействие системы регулирования.
На чертеже изображена структурная схема устройства, позволяющего осуществить предлагаемый способ.
Система включает в себя блок задания 1, сумматор 2, датчик 3 регулируемого параметра, ПИ-корректирующий регулятор 4, сумматор 5, стабилизирующий регулятор 6, датчик 7 стабилизируемой величины; регулирующее устройство 8, блок коррекции 9, датчик нагрузки 10, сумматор 11, задатчик нагрузки 12, исполнительный блок 13, дифференциатор 14, делитель 15, дифференциатор 16, блок формирования 17.
Выход задатчика регулируемого параметра 1 подключен к отрицательному входу первого сумматора 2 и к первому входу дифференциатора 14. Выход дифференциатора 14 подключен через исполнительный блок 13 на второй положительный вход сумматора 2. На первый вход блока делителя 15 поступает выходной сигнал дифференциатора 14, а на второй вход выходной сигнал дифференциатора 16. Выход блока деления (соотношения) 15 подключен через формирователь 17 на вход настройки ПИ-корректирующего регулятора 4. Выход сумматора 2 подключен на первый вход ПИ-корректирующего регулятора, выход которого подключен на положительный вход сумматора 5. Выход датчика стабилизируемой величины 7 подключен на отрицательный вход сумматора 5, выход которого подключен на вход стабилизатора 6, управляющего регулирующим устройством 8. Датчик нагрузки 10 подключен на отрицательный вход сумматора 11 и на вход блока коррекции 9, выходы которого подключены к входу настройки дифференциатора 14 и на вход настройки ПИ-корректирующего регулятора 4 соответственно, а третий выход подключен к входу настройки стабилизирующего регулятора. Выход сумматора 11 подключен к входу исполнительного блока 13. Выход сумматора 2 подключен к основному входу ПИ-корректирующего регулятора 4. Выход задатчика нагрузки 12 подключен к положительному входу сумматора 11. Выход датчика регулируемого параметра подключен на вход дифференциатора 16. Задатчики регулируемого параметра 1 и нагрузки 12 формируют сигналы, величина которых соответствует заданному значению регулируемого параметра и нагрузки.
Сумматоры 2, 5 и 11 сравнивают заданные и действительные значения регулируемого параметра, стабилизируемого параметра и нагрузки соответственно.
Датчики 3, 7 и 10 определяют текущие значения регулируемого параметра, стабилизируемого параметра и нагрузки соответственно.
Корректирующий 4 и стабилизирующий 6 регуляторы по величине ошибки регулирования формируют управляющие сигналы. Величина управляющего сигнала зависит от параметров настройки, изменения которых производится через дополнительные входы.
Регулирующее устройство 8 позволяет изменять регулирующее воздействие на объект, параметр которого стабилизируется.
Блок коррекции 9 по сигналу с выхода датчика нагрузки 10 формирует сигналы, определяющие постоянную времени дифференциатора 14, коэффициенты ПИ-корректирующего регулятора и параметры стабилизирующего регулятора.
Исполнительный блок 13 осуществляет подключение выходного сигнала дифференциатора 14 как корректирующий сигнал на вход сумматора 2, если действительное значение нагрузки меньше 70% от заданного.
Дифференциаторы 14 и 16 находят производные заданного и текущего значения соответственно регулируемого параметра.
Делитель 15 осуществляет деление производной от сигнала задания на производную от сигнала текущего значения регулируемого параметра.
Формирователь 17 по сигналу с выхода делителя 15 соответствующим образом изменяет параметры ПИ-корректирующего регулятора 4.
При постоянной нагрузке и при отсутствии возмущающих воздействий на регулируемую величину параметры ПИ-корректирующего регулятора и стабилизирующего регулятора остаются без изменения.
При изменившейся нагрузке адаптацию параметров регуляторов 4 и 6 производит блок коррекции 9.
Входной сигнал ПИ-корректирующего регулятора 4 изменяется в зависимости от входного корректирующего сигнала, подключаемого при изменении сигнала задания и нагрузки существенно меньшей заданной.
При появлении внутренних возмущающих воздействий в объекте регулирования, или внешних возмущающих воздействиях, или при изменении производной от сигнала задания меняется соотношение между производной сигнала задания и производной сигнала текущего значения регулируемой величины. Введенные элементы 15 и 16 находят это соотношение и соответствующим образом через формирователь 17 изменяют параметры ПИ-корректирующего регулятора 4. Увеличение этого соотношения приводит к увеличению коэффициента динамической настройки ПИ-корректирующего регулятора 4, а уменьшение к уменьшению динамической настройки.
Таким образом коррекция параметров динамической настройки осуществляется не только при изменении нагрузки, но и при изменении параметров, обусловленных внутренними возмущениями, что уменьшает постоянную времени замкнутой системы и соответственно повышает быстродействие системы. Уменьшение длительности переходного процесса повышает динами- ческую точность системы, система становится более устойчивой, что повышает ее надежность, увеличивает срок службы оборудования, что приводит к экономическому эффекту.
Использование: теплотехника, при автоматизации теплоэнергетических объектов. Сущность изобретения: выходной сигнал датчика регулируемой величины дифференцируется в блоке 16, после чего блоком 15 находится соотношение между производной от сигнала задания регулируемого параметра, поступающего с выхода блока 14 и производной сигнала текущего значения регулируемой величины, поступающей с выхода блока 16. По сигналу соотношения между производными формируется в блоке формирования 17 сигнал коэффициента настройки ПИ-корректирующего регулятора. 1 ил.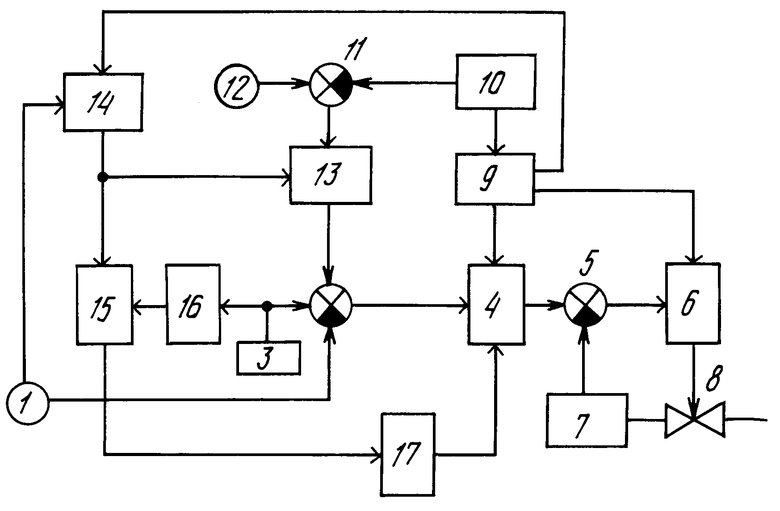
СПОСОБ КАСКАДНОГО РЕГУЛИРОВАНИЯ ТЕХНОЛОГИЧЕСКОГО ПАРАМЕТРА ТЕПЛОЭНЕРГЕТИЧЕСКОГО ОБЪЕКТА путем изменения положения регулирующего органа по динамически преобразованной сумме отклонения стабилизируемой величины от заданного значения и корректирующего сигнала, пропорционального динамически преобразованному сигналу отклонения регулируемого параметра от сигнала задания, и сигнала коррекции по дифференциальному сигналу задания при нагрузке объекта меньше заданной, отличающийся тем, что вычисляют производную от текущего значения регулируемого параметра и отношение между производной заданного значения регулируемого параметра и производной измеренного текущего значения регулируемого параметра и по этому отношению формируют коэффициент динамической настройки суммы сигналов отклонения стабилизируемой величины от заданного значения и корректирующего сигнала.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ каскадного регулированияТЕХНОлОгичЕСКОгО пАРАМЕТРАТЕплОэНЕРгЕТичЕСКОгО Об'ЕКТА | 1979 |
|
SU848879A1 |
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
