дом блока лля слежения за задержкой, выход которого соединен с,вторым входом первого перемножителя, а также фазовый детектор, выход которогЬ через последовательно соединенные фильтр нижних частот и управляемый с тактовый генератор соединен с первым входом фазового детектора, введены третий и четвертый перемножители, второй синхронный детектор, первый и второй фазовращатели, допЬлнительяый фильтр нижних частот и управля- ёмый делитель частоты, причем выход уйравляемогЬ тактового генератора через последовательно соединенные первый фазовршдатёль, второй синхронный детектор, третий перемножи- 5 гель и дополнительный фильтр нижних частот соединен с первым входом управляемого делителя частоты, выход которого соединен с первым входом четвертого перемножителя, Д1ругим вхо- 20 ом управлйклдего блока и через второй фазовращатель с другим вхйдам третьего перемножптеля, при этом выход второго перемножителя соединен с другим входом второго синхронного 25 етектора и с вторым входом четвертого перемножителя, выход которого соединен с вто{млм входом фазового-детектора, при этом выход управляемого тактового генератора соединен с дру- зо гим входом управляемого делителя часоты,.
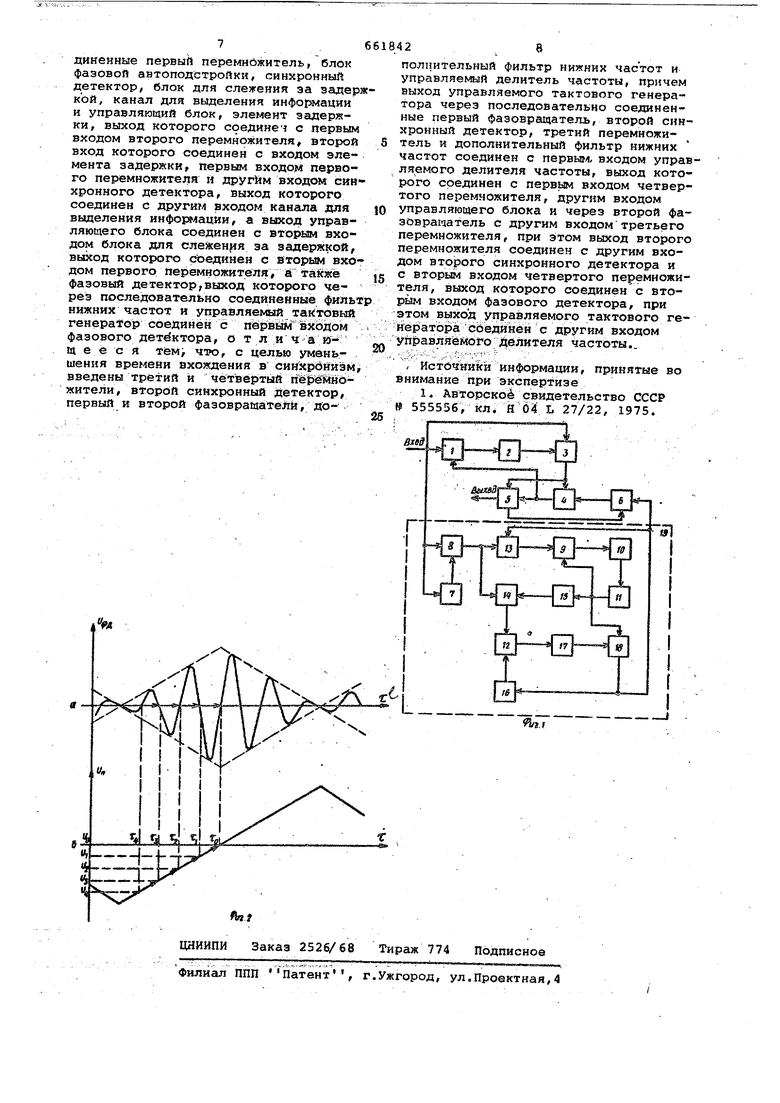
На фиг. 1 приведена структурная электрическая схема устройства; на фиг. 2 - временные диаграммы, иллю- 35 стрируюцие принцип работы синхроканала. .
Устройство для приема фазоманипулированных псевдослучайных сигналов
содержит последовательно соединенйые 40 первый перемножитель 1, блок 2, предназначенный для фазовой автоподстройки, синхронный детектор 3, блок 4, предназначенный для слежения за задержкой, канал 5, предназначенный для 45 выделения информации, управляющий блок 6, элемент задержки 7, выход которого соединен с первым входом второго перемножителя 8, второй вход Которого соединен с входом элемента gn задержки 7, первым входом первого перемножителя i и другим входом синхронного детектора 3, выход которого соединен с другим входом канала 5, а выход управляющего блока 6 соединен „
с втЬрым входом блока 4, выход которого соединен с вторым входов первого перемножителя 1, а также фазовый де тёктор 9, вььсод котЬрого черё З пбследова:тельно соединенные фильтр 10 нижних частот и управляемый тактовый 60 генератор 11 соедийен с первым входом фазового Детектора 9, третий и четвертый пёремножители 12 и 13, второй синхронный детектор 14, первый и вторрй ф§1зЬвраща;тели l5 и 16, дополни- 65
.Тел1ьный фильтр 17 и управляемый дели(тель 18 частоты, причем выход управляемого тактового генератора 11 через последовательно соединенные первый фазовращатель 15, второй синхронный детектор 14, третий перемножитель 12 и дополнительный фильтр 17 нижних частот соединен с первым входом управляемого делителя 18 частоты/ выход которого соединен ,с первым входом четвертого перемнржителя 13, другим входом управляющего блока б и через второй фазовращатель 16 с другим входом третьего перемножителя 12, при этом выход второго перемножителя 8 соединен с другим входом Второго синхронного детектора 14 и с вторым входом четвертого перемножителя 13, выход которого соединен с вторым вхоДом фазового детектора 9, при этом выход управляемого тактового генератора 11 соединен с другим входом управляемого делителя 18, канал синхрЬнизации 19,
Устройство работает cлeдs oL им образом.
В синхронном режиме В1:олной фазоманипулированный сигнал по закону бинарной псевдослучайной последовательности поступает на вход устррйства и в первом перемножнтеле 1 преобразуется в гармонический сигнал за счет перемножения с опорным бинарнш сигналом, поступающим с выхода блока 4 и фильтруется блоком фазовой автоподстройки 2, Этот же входной сигнал в синхронном детекторе 3 преобразуется в бинарную последовательность, так как на второй вход его поступает гармонический сигнал с .выхода блока фазовой автоподстройки 2. Выделенный бинарный сигнал поступает в блок 4 и.в канал 5 для выделения информгщии. Блок 4 для слежения за задержкой следит за временным положением фазоманипулированного сигнала путем определения максимума взаимной корреляции принимаемого и опорного сигналов. Канал 5 для выделения информации путем сравнения принимаемой последовательности с опорныгл сигналом осуществляет выделение информационных импульсов, которые поступают на erio первый вьсЕод. Сигнал о наличии либо отсутствии синхронизации с второго выхода канала 5 для выделения информации поступает на управляющий блок 6
В случае отсутствия синхронизации управляющий блок б подключает.выход канала синхронизации 19 к установочному входу блока 4. При этом импульсы канала синхронизации 19, несущие информацию о временном положении принимаемого сигнала, возвращают приемное устройство в положение синхрониз.ма.
Работа канала синхронизации 19 зак шдчается в следующем.
5 Сигнал с входа пpинимae югo устрой ства поступает на устройство для выделения тактовой частоты, образованное элементом задержки 7 и вторым перемножителем 8. При этом в спектре произведения фазоманипулированного псевдослучайного сигнала и этого же сигнала, смещенного во времени на половину периода тактовой частоты, содержится составляющая тактовой частоты псевдослучайного сигнала. Ввиду того, что манипуляция псевдослучайного сигнала по задержке приводит к манипуляции фазы тактовой частоты на , фаза вьщеленного колебания тактовой частоты изменяется в соответствии с бинарными информационными посылками. Для снятия этой фазовой манипуляции с целью получения гармонического сигнала . сигнал с выхода устройства для выделения тактовой частоты поступает ,на четвертый перёмножитель13, на второй вход которого пода ется меандровый сигнал, соответствующий информационныг- посылкам. Выделенный гармонический сигнал тактовой частоты фильтруется блоком фазовой автоподстройки тактовой.частоты, образованным последовательным включением фазового детектора 9, фильтра 10 и управляемого тактового генератора 11/ выход которого подключен к второму входу фазового детектора 9. Отфильтрованный гармонический сиг нал тактовой частоты с выхода управляемого тактового генератора 11 через первый фазовращатель 15 поступает на вход второго синхронного детектора 14, на второй вход которого Приходит ФМ-сигнал тактовой частоты с выхода второго перемножителя 8. В результате на выходе второго синхронного детектора 14 выделяется меандровый сигнал в соответствий с информационными посылками. Выделенны таким образом меандровый сигнал филь руется в следящем корреляторе, в сос тав которого входят третий перемножи тель 12, дополнительный фильтр 17 нижних частот, управляемый делитель частоты 18, второй фазовращатель 16. При этом, в результате перемножения выделенного информационного меандра ц меандрового сигнала управляемого делителя частоты 18, проходящего через второй фазовращатель 16 на второй вход третьего перёмножителя 12 и фильтрации с помощью дополнительного фильтра 17, на входе последнего появляется напряжение, пропорциональ ное значению взаимной корреляционно функции этих сигналов. Это напряжени управляет коэффициентом деления .упра лелитедя частоты 18, так что временное рассогласование между этим сигналами стремится к нулю.Этот процесс иллюстрируется связанными между собой дискриминационными характерис6тиками блока фаловой автоподстройки тактовой частоты (см.фиг.2а) и следящего коррелятора, (см. фиг. 2б) . Предположим, что is начальный момент расстройка между принимаемым и опорным меандровым сигналами равна Т. . При этом на выходе третьего перемножителя 12 напряжение равно U которое изменяет коэффициент деления управляемого делителя частоты 18, что приводит к дискретному изменению задержки от Т к t j и так далее до Т, пока напряжение на выходе третьего перемножителя не станет равно нулю (либо будет находиться в пределах зоны нечувствительности). В дальнейшем блок фазовой автоподстройки тактовой частоты осуществляет слежение за фазой тактовой частоты и за счет постоянного коэффициента деления, а фазой меандрового сигнала, поддерживая максимум взаимной корреляции дежду принимаемым и опорным меандровыми сигналами. Так как информационный меандр привязан по временному положению к началу псевдослучайной последовательности, то импульсы с выхода делителя 18 несут информацию о временном положении псевдослучайной последовательности, что позволяет ввести приемное устройство в целом в положение синхронизма. Применение предложенного устройства позволяет получить помехоустойчивость следящих крлец. такой же, как у известного, тай как полоса пропускания следящего коррелятора во много раз меньше полосы блока фазовой автрподстрЬйки тактовой частоты, что приводит к практически безошибочному снятию манипуляции сигнала такторой частоты; В то же время применение следящего коррелятора за временным положением информационного меандра позволяет с большой точностью производить наведение импульсов вби;вания кода в устройстве для слежения за задерзккой, что в среднем сокращает количество попыток вбивания до достижения правильного результата. Кроме того, данное устройство не подвержено влиянию допплеровского смещения тактовой частоты, что в известном устройстве приводило к нежелательным эффектам отклонения импульса вбивания от номинального значения, так как переходный процесс в блоке фазовой автоподстройки частоты при перескоке фазы на 180° зависит от начальньрс условий, которые изменяются в соответствии с допплеровским смещением тактовой частоты. Формула изобретения Устройство для приема фазоманипулиро.ванных псевдослучайных сигналов, содержащее последовательно сое
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий фильтр для обработки фазоманипулированного псевдослучайного радиосигнала | 1985 |
|
SU1370793A1 |
| Устройство для приема фазоманипулирован-НыХ пСЕВдОСлучАйНыХ СигНАлОВ | 1979 |
|
SU809645A2 |
| Устройство для корреляционного приема сложных фазоманипулированных сигналов | 1980 |
|
SU930719A1 |
| Устройство приема фазоманипулированных псевдослучайных сигналов | 1980 |
|
SU879813A1 |
| Устройство для приема псевдослучайныхфАзОМАНипулиРОВАННыХ СигНАлОВ | 1979 |
|
SU815962A1 |
| Устройство для приема фазоманипулированных псевдослучайных сигналов | 1975 |
|
SU555556A1 |
| Устройство тактовой синхронизации псевдослучайных последовательностей | 1982 |
|
SU1048581A1 |
| СЛЕДЯЩИЙ ФИЛЬТР С ПЕРЕКРЕСТНОЙ ДЕМОДУЛЯЦИЕЙ И ПРОГРАММНЫМ УПРАВЛЕНИЕМ | 1970 |
|
SU259972A1 |
| УСТРОЙСТВО ДЛЯ ПРИЕМА ШУМОПОДОБНЫХ СИГНАЛОВ | 1992 |
|
RU2097925C1 |
| Корреляционный приемник сложных фазоманипулированных сигналов | 1981 |
|
SU1046943A1 |
