1
Изобретение относится к.судопойъему, в частности к тросопротаскивающйм устройствам.
Известен реактивный грунтсразмы вочный снаряд, содержащий корпус и приспособление для промывки туннеля 1.
- у
Недостатком указанного устройства является невозможность изменить направление движения в грунте в процессе 3аводки стропа без воздействия на стенки образуемого туннеля.
Наиболее близким к предлагаемому является тросопротаскивающее: устройство, содержащее корпус, привод для тягйобразования, систему ориентации и систему управления с дебалансами 2.
Однако известное устройство не обеспечивает заводки стропа по опти-маЛьной траектории вследствии низкой эффективности системы управления Реактивные струи из сопел размывают стенки туннеля, что приводит к неопределенности в положении корпуса уст;ройства и к неоднозначности управляющего воздействия. При встрече с твердым включением породы, оказавшимся на пути движения устройства, оно останавливается и размыкает камеру, в
которой не может занять фиксированное положение, а осуществляет коле ания вплоть до поворота на 180 или параллельному самому себе проседания В связи с этим последующая коррекция направления чрезвычайно затруднительна и не может быть осуществлена с достаточной точностью, так как проседание корпуса устройства вносит недопустимую ошибку в систему ориентации .
Целью изобретения является повышение точности заводки стропа по заданной траектории.
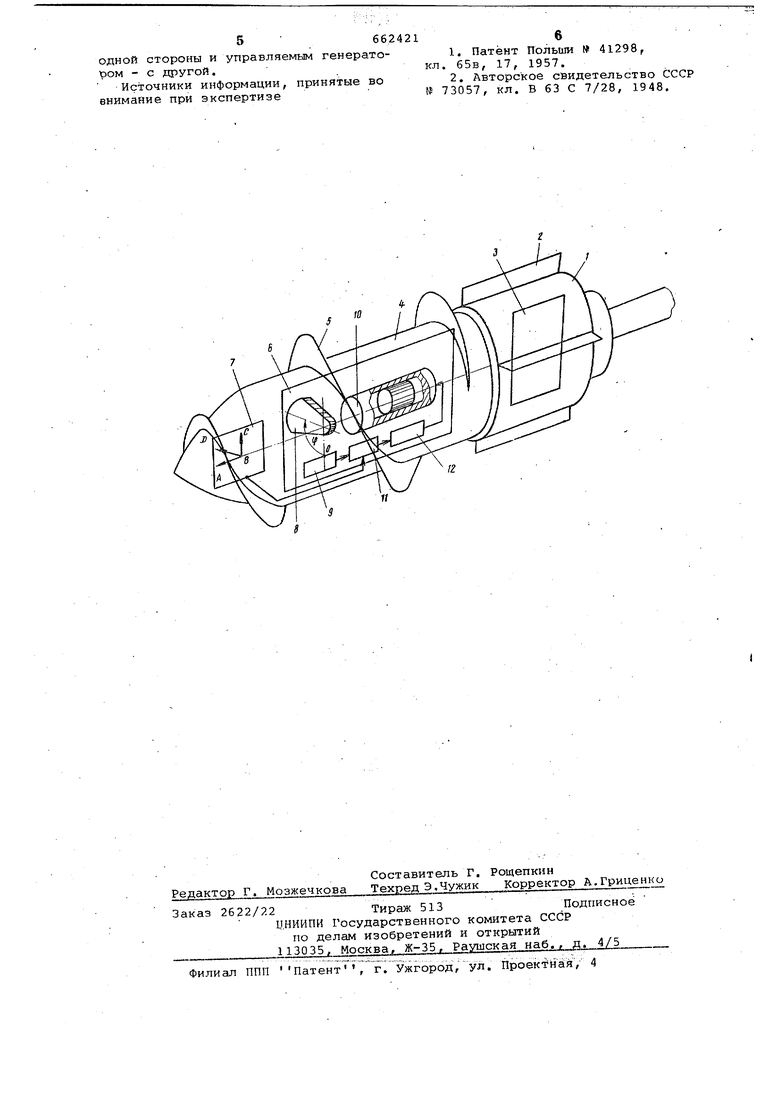
Это достигается тем, что система управления содержит блок задержки синхронизации амплитуд колебаний радиального .и продольного небалансов, датчик нулевого пблсэясёния радиального дебаланса, управляемый генератор колебаний продольного дебаланса и датчик системы ориентации, причем блок задержки синхронизации амплитуд колебаний радиального и продольного дебалансов включен между датчиком нулевого положения радиального дебаланса и датчиком системы ориентации с одной стороны и управляемым генератором с другой. На чертеже изображено тросопротас ивающее устройство, обмий вид. Устройство состоит из корпуса, хвостовая часть 1 которого/имеющая стабилизирующее оперение 2, снабжена приводом.3 для тягообразования, а но совая часть 4, имеющая винтовую нарезку 5, содержит систему 6 управле; Гния и систему 7 ориентации. Система управления устройства содержит радиальный дебаланс 8, датчик 9 нулевого положения радикального дебалаНса, представляющий собой отвес, продольньай дебаланс 10, блок 11 задержки синхронизации амплитуд колеба ний радиального и продольного дебалансов и управляемый генератор 12 ко лебаний продольного дебаланса. Для реализации криволинейной траектории заданного радиуса кривизны корпусу тросопротаскивающегр устройства с помощью дебалансов сообщают систематическое корректирующее управ ляющеё воздействие, образующееся как результат влияния направленной вибра ции .на физико-механические свойства грунта.. При врагДении радиального дебаланс 8 возникает возмущающая сила, котора ВВОДИТ носовую часть снаряда в ра диальную вибрацию, , Управляющее воздействие возникает . за счет того, что удар продольного дебаланса происходит в тот момент, когда корпус снаряда в процессе ра.ди альной вибрации отклоняется ,в..HanpaB лении, соответствующем направлению необходимой коррекции, определяемому по сигналам датчиков системы 7 ориен тации. Если направление продольной .оси движения снаряда представить стрелкой АВ, а направление необходимой коррекции - стрелкой ВС, то. направленная вибрация должна сообщаться, в направлении BD. Для этого на один вход блока 11 задержки подаются импульсы с датчика 9.нулевого положения в момен ты7кбгдарадиальный дебаланс проходит нулевое положение в точке О, а на второй вход блока 11 подается сигнал с датчика системы 7 ориентации. На выходе блока .11 образуются импульсы, сдвинутые по фазе относительно импульсов с датчика 9 на величину, пропорциональную сигналу с датчика сие.темы 7 ориентации, которая будет равна времени поворота дебаланса 8 на угол Ч (для направления ВС f равен 180°), Выход блока 11 задержки подключен к управляемому генератору 12, который заставляет колебаться продольный дебаланс 10 синхронно срадиальным дебалансом 8, сообщая корпусу тросопротаскивающего снаряда-вибрацию, направленную в необходимом на правлении (в направлении BD) , Если. в этом направлении встречается твердое включение, которое не поддается режущим органам устройства, оно под действием управляющего воздействия .начнет плавный обход включения по границе твердой и мягкой породы. Плавные изменения углов, характеризу ющих положение оси корпуса устройства в пространстве, легко регистрируются .системой ориентации с высокой точностью. Систематическое управляющее воздействие в предлагаемом устройстве исключает возможность образования камер в местах разворота, т.е. исключает возм.ожнЪсть колебаний или про.седаний при коррекции направления. Такой режим движения не приводит к образованию ошибок в системе ориентации, позволяет однозначно и точно определять направление и величину систематического управляющего воздействия, что дает возможность с высокой точностью вести устройство по заданной оптимальной траектории. Достоинством описанного устройства является простота технического решения и легкость его применения на тросопротаскивающем снаряде любого типа. Особенно перспективно примене- ние его со шнекбвыми движителями. Наличие вибрации уменьшает сопротивление внедрению шнеков в грунт и одновременно способствует уплотнению стенок туннеля, предотвращая их обруше-ние и заиливание туннеля.. Автоматизированный тросопротаскивающий снаряд решает.задачу заводки стропбв с минимальными затратами водолазйого труда, исключает необходимость размыва и удаления больших масс грунта для образования туннеля, под корпусом судна и позволяет, таким образом, значительно сократить затраты времени и . материальных средств на заводку стропов. Формула изобретения Тросопротаскивающее устройство, содержащее корпус, привод для тягообразования, систему ориентации и систему управления с дебалансами, отличающееся тем, что, с целью повышения точности заводки стропа по заданной траектории, система управления содержит блок задержки синхронизации амплитуд к-олебаний радиального и продольного дебалансов, датчик нулевого положения радиального дебаланса, управляемый генератор колебаний продольного дебаланса и датчик системы ориентации, причем блок задержки синхронизации амплитуд колебаний радиального и продольного дебалансов включен между датчиком нулевого положения радиального дебалан-. са и датчиком системы ориентации с
5 6624216
одной стороны и управляемым генерато- 1. Патент Польши 41298, ром - с другой.кл. 65в, 17, 1957.
Источники информации, принятые во 2. Авторское свидетельство СССР внимание при экспертизе № 73057, кл. В 63 С 7/28, 1948.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЭКСТРЕННОЙ ДИАГНОСТИКИ ТРУБОПРОВОДОВ ВЫСОКОГО ДАВЛЕНИЯ | 2010 |
|
RU2442072C1 |
| СПОСОБ И УСТРОЙСТВО УРАВНОВЕШИВАНИЯ ВИБРАЦИОННЫХ НАГРУЗОК В РОТОРНЫХ МАШИНАХ | 2004 |
|
RU2282763C2 |
| Тросопротаскивающее устройство | 1975 |
|
SU536090A1 |
| Тросопротаскивающее устройство | 1975 |
|
SU569481A1 |
| Тросопротаскивающее устройство | 1975 |
|
SU525591A1 |
| СПОСОБ ВОЗБУЖДЕНИЯ ВИБРАЦИОННЫХ КОЛЕБАНИЙ ДЛЯ ПРОВЕДЕНИЯ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ И ДЕБАЛАНСНЫЙ ВИБРОВОЗБУДИТЕЛЬ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2387488C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЛОКАЛЬНЫХ УЧАСТКОВ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ С МАКСИМАЛЬНОЙ ДЕФОРМАЦИЕЙ | 2004 |
|
RU2272248C1 |
| Устройство для определения динамических характеристик грунта в скважине | 1978 |
|
SU771334A1 |
| СПОСОБ ИДЕНТИФИКАЦИИ СМЕЩЕНИЙ ОСЕВОЙ ЛИНИИ ТРУБОПРОВОДА | 2016 |
|
RU2621219C1 |
| СПОСОБ УПРАВЛЕНИЯ РЕАКТИВНЫМ СНАРЯДОМ | 2012 |
|
RU2502937C1 |
