Изобретение относится к машиностроению, а именно к технике уравновешивания роторных машин.
Наиболее близким техническим решением к заявляемому объекту является способ и устройство для уравновешивания вибрационных нагрузок в роторных машинах по авторскому свидетельству СССР №1373928, F 16 F 15/10 от 13.05.85, в котором динамические нагрузки уравновешивают в противофазе движению источнику колебаний, а устройство для осуществления способа содержит механизм синхронизации, обеспечивающий противофазность движения источнику колебаний.
Недостатком известного устройства является сравнительно невысокая эффективность из-за отсутствия возможности создания вектора момента сил, направленного по оси вращения ротора и гармонически изменяющегося по модулю.
Целью изобретения является повышение эффективности уравновешивания вибрационных нагрузок в роторных машинах путем введения дополнительных вращающихся вибраторов, размещенных в корпусе машины вне ротора.
Это достигается тем, что в способе уравновешивания вибрационных нагрузок в роторных машинах, при котором используют противофазное источнику колебаний движение инерционных масс, в корпусе роторной машины размещают два механизма, в которых размещают вращаемые управляемыми электроприводами дебалансные вибраторы; причем одним механизмом создают вектор силы, вращающийся в плоскости, перпендикулярной оси вала, и настраивают его по модулю от нулевого значения до максимальной величины и меняют фазу вращения суммарного вектора, при этом по модулю величина силы может пульсировать с более высокой частотой, кратной частоте вращения, а другим механизмом создают момент сил, вектор которого направлен по оси вращения ротора, при этом по модулю этот вектор изменяют по гармоническому или полигармоническому закону.
Это достигается тем, что в устройстве уравновешивания вибрационных нагрузок в роторных машинах, содержащем блок синхронизации, обеспечивающий противофазность движения инерционной массы движению источника колебаний, блок синхронизации выполнен в виде двух механизмов, в каждом из которых расположены четыре дебалансных вибратора с равными дебалансами, которые располагаются как на равных расстояниях от оси ротора, причем вибраторы вращаются с оборотами, равными оборотам ротора, так и симметрично относительно оси вала, причем вращаются вибраторы синхронно таким образом, что их векторы сил всегда параллельны, а суммарный вектор проходит через ось вала, при этом взаимная ориентация фаз двух пар дебалансных вибраторов от 0 до 180 градусов изменяет величину модуля суммарного вектора дебаланса от нуля до максимума, а на основное вращение дебалансных вибраторов обоих механизмов накладываются пульсации угловой скорости, фазы которых обеспечивают уравновешивание высших гармоник реактивного момента, причем нахождение фаз вращения дебалансных вибраторов происходит путем анализа сигналов кинематических и силовых датчиков вибрации, сигналы которых обрабатываются входящим в систему уравновешивания нейрокомпьютером, который по сигналам датчиков вибраций в поисковом режиме экстремального регулятора производит минимизацию вибрационных сигналов на соответствующих частотах путем поиска абсолютных или относительных фаз пар вращающихся дебалансных вибраторов.
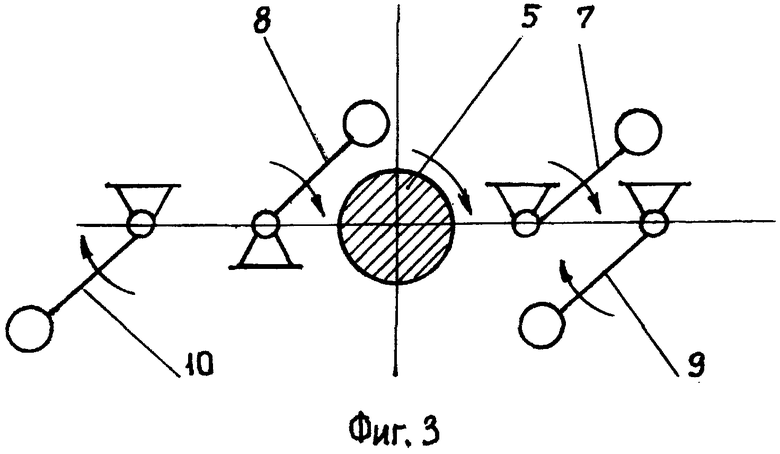
На фиг.1 приведена общая схема, иллюстрирующая реализацию способа, на фиг.2 показана максимальная величина суммарного дебаланса, на фиг.3 приведена нулевая величина суммарного дебаланса, на фиг.4 приведена промежуточная величина суммарного дебаланса, на фиг.5 приведена схема электропривода, вращающего синхронно две пары дебалансных вибраторов.
Общая схема, иллюстрирующая реализацию способа уравновешивания вибрационных нагрузок роторной машины, приведена на фиг.1. Роторная машина содержит исполнительные органы и механизмы, создающие выходной (двигатель) или воспринимающие входной (электрогенератор, насос, компрессор) крутящий момент на валу ротора. Через опорные подшипники ротора на корпус передаются неуравновешенные вибрационные силы, в основном, из-за инерционных дебалансов ротора, но, возможно, из-за пульсаций электромагнитных полей, пульсаций давления жидкости и газа, зазоров в подшипниках, дискретности рабочих полостей, лопастных колес, обмотки статоров и роторов электромашин, зубчатых передач и других возможных факторов.
Устройство для уравновешивания вибрационных нагрузок в роторных машинах содержит механизм уравновешивания 1, который размещается вблизи опорных подшипников ротора в плоскости, перпендикулярной оси вала. Число таких устройств может быть равно (или меньше) числа опорных подшипников. Эти устройства предназначены для компенсации неуравновешенных сил инерции, которые передаются с вращающегося ротора на опоры. Вблизи опор машины на основании в корпусе размещаются элементы механизма 2, которые предназначены для уравновешивания и ликвидации попадания на опоры машины пульсаций реактивного (равного по величине и противоположного крутящему) момента и связанных с ним дополнительных динамических сил. Каждый из перечисленных механизмов содержит четыре вращающихся дебалансных вибратора. Вращение вибраторов осуществляется управляемыми прецизионными электроприводами. Частота вращения механизма 1 равна частоте вращения ротора, а механизма 2 - равна или кратна частоте вращения ротора.
Для обеспечения такого вращения с учетом требования точного поддержания нужных фаз в положениях вращающихся дебалансов предлагаемое техническое решение обеспечивается современными средствами механотроники (соединения механики, автоматики, электроники и информатики). Система уравновешивания оснащена датчиками вибраций и вычислительной системой на основе нейрокомпьютера.
Элементы механизмов 1 располагаются в корпусе машины вблизи опорных подшипников ротора (фиг.1), а механизмов 2 - вблизи опор корпуса на основании, предпочтительно между опорами в поперечной плоскости, воспринимающими реактивный момент, равный по величине и противоположный крутящему. Вибрационное состояние механизмов 1 и 2 контролируется вибродатчиками 3 (измерением кинематических или силовых параметров, а также тех и других совместно). Вибрационные сигналы поступают в управляющий нейрокомпьютер 4. Нейрокомпьютер формирует в реальном времени управляющие сигналы на вращательные электроприводы дебалансных вибраторов всех механизмов 1 и 2 для снижения вибраций, регистрируемых вибродатчиками. Вращающийся вал 5 механизма 1 (фиг.2) расположен в подшипнике, который находится в корпусе 6. В поперечной плоскости подшипника ось, пересекающая ось вала 5, в свою очередь пересекается осями валов четырех дебалансных вибраторов, параллельных оси вала 5. Оси этих вибраторов расположены попарно на равных расстояниях от оси вала 5, они показаны на схеме фиг.2 как 7-8 и 9-10. Величины дебалансов всех вибраторов равны. Все четыре вибратора вращаются с основной угловой скоростью вала 5 в направлении вращения вала 5 (пульсации угловой скорости в пределах одного оборота могут формироваться специально). Пара вибраторов 7-8 вращается синхронно в одной фазе положения дебалансов. То же относится в паре 9-10. То есть дебалансы 7-8 и 9-10 образуют попарно параллельные вращающиеся силы и суммарные векторы попарно проходят через ось вращения вала 5. Эти векторы после настройки в основном вращаются с угловой скоростью вала 5. Абсолютные и относительные фазы пар 7-8 и 9-10 регулируются электроприводами. Вибраторы 7-8 расположены в корпусном блоке 11, вибраторы 8-10 в корпусном блоке 12. Для регулирования фаз валы вибраторов 7, 8, 9 и 10 имеют дискретные датчики угловых положений 13, 14, 15 и 16. Вибрация всего блока контролируется многокомпонентным вибродатчиком 4. Взаимное регулирование относительной фазы пар вибраторов 7, 8 и 9, 10 позволяет изменять суммарную величину дебаланса вибраторов от нуля до максимального значения.
На фиг.2 показана максимальная величина суммарного дебаланса, когда пары 7, 8 и 9, 10 находятся в одной фазе вращения. На фиг.3 приведена нулевая величина суммарного дебаланса, когда пары 7, 8 и 9, 10 находятся в противофазе, на фиг.4 приведена промежуточная величина суммарного дебаланса. Абсолютная фаза дебаланса вибраторов регулируется, чтобы было найдено противофазное положение вектора суммарного дебаланса к дебалансу ротора, действующему на данный опорный подшипник (фиг.4).
Корпусный блок механизма 2 располагается вблизи опор корпуса роторной машины на основании. На эти опоры передается реактивный момент, равный по величине и противоположный по направлению крутящему моменту (фиг.1). Частота оборотов дебалансных вибраторов выбирается равной произведению оборотов вала на число дискретных рабочих органов (число лопаток, число цилиндров). Управляемые электропривода вращают синхронно две пары дебалансных вибраторов, пару 17, 18 и 19, 20. Все вибраторы вращаются в одном направлении (фиг.5). Направление векторов сил вибраторов 17, 18 и 19, 20 равно 180 град. Величины дебалансов и расстояния между осями вибраторов пар 17, 18 и 19, 20 выбираются таким образом, что амплитудные значения моментов сил, образованных парами 17, 18 и 19, 20, равны. Абсолютные и относительные фазы пар 17, 18 и 19, 20 регулируются управляемыми электроприводами. При относительной фазе пар 17, 18 и 19, 20 равный нулю суммарный момент от дебалансов будет максимальный, а при относительной 180 град. (показано на фиг.5 пунктиром) - равен нулю. Дискретные положения датчики 21, 22, 23 и 24 валов вибраторов обеспечивают регулирование электроприводами абсолютных и относительных фаз пар вибраторов 17, 18 и 19, 20 при вращении.
Предлагаемый способ осуществляют следующим образом.
Системой уравновешивания, реализованной механизмом 1, создают вектор силы, вращающийся в плоскости, перпендикулярной оси вала, причем вектор настраивают по модулю от нулевого значения до максимальной величины и меняют фазу вращения суммарного вектора. Кроме того, по модулю величина силы может пульсировать с более высокой частотой, кратной частоте вращения. Механизмом 2 создают момент сил, вектор которого направлен по оси вращения ротора. По модулю этот вектор изменяется по гармоническому или полигармоническому закону. Фазы отдельных гармоник находятся в определенном соотношении. Фазы пульсации имеют определенное соотношение с фазами вращения.
Поиск величины векторов, закона изменения модуля за оборот ротора производятся по датчикам вибрации по принципам действия экстремального регулятора в поисковом режиме. Регулируются мгновенные скорости вращения и фазы электроприводов вращающихся дебалансных вибраторов. Находятся минимальные величины вибраций в контрольных точках, то есть находится такое положение фаз вращающихся дебалансов, что векторы инерционных сил и величины пульсаций моментов от инерционных сил оказываются в противофазе с вектором неуравновешенных сил и пульсаций реактивного момента.
Управляющий нейрокомпьютер формирует управление в поисковом режиме путем минимизации вибрационных сигналов датчиков 3 (фиг.1, 2 и 3). Используя алгоритмы экстремального управления, автоматически находят минимум сигналов датчиков 3. Силы и моменты сил, создаваемые дебалансными вибраторами механизмов 1 и 2, уравновешивают силы и моменты, передаваемые на корпус роторной машины от вращающегося ротора за счет установки в противофазные этим силам и моментам положение. Алгоритм поиска следующий.
Устройство для уравновешивания вибрационных нагрузок в роторных машинах работает следующим образом.
Автоматически поддерживается угловая скорость пар вибраторов 7, 8 и 9, 10 равной скорости вращения ротора. Регулируется по фазам абсолютное и относительное положение пар вибраторов 7, 8 и 9, 10, пока по показаниям вибродатчика 3 (фиг.2) не будет достигнут минимум. Это означает, что автоматически найдены величина и фаза суммарного дебаланса, уравновешивающего приведенный к данной опоре ротора дебаланс ротора. Датчиками 3 анализируется вибрация на удвоенной частоте оборотов. На основной период, равный времени одного оборота вибраторов, накладывается гармоника с ускорением на первом полупериоде и замедлением на втором полупериоде. Варьируется амплитуда этого процесса и его начальная фаза для пар вибраторов 7, 8 и 9, 10. Методика поискового экстремального регулирования заключается в том, что находится минимум вибраций датчиков 3 на двойной частоте. Та же схема используется для более высоких гармоник - третьей, четвертой оборотной частоты и т.д.
Аналогичная схема применяется и в работе механизма 2. Отличие состоит в том, что базовая скорость вращения пар вибраторов 17, 18 и 19, 20 равна произведению частоты оборотов ротора, умноженной на число дискретных рабочих элементов (число лопастей, число цилиндров). Алгоритм работы системы экстремального поискового регулирования, осуществляемый нейрокомпьютером 4 от датчиков 3 аналогичен описанному для механизмов 1.
Относительная фаза гармоники момента, создаваемого каждой парой вибраторов изменяет величину амплитуды момента от нуля до максимума, а абсолютная фаза гармоники суммарного момента занимает в результате компьютерного поиска по показаниям датчиков вибраций положение, противофазное соответствующей гармонике, вектора реактивного момента.
На основное вращение дебалансных вибраторов обоих механизмов накладываются пульсации угловой скорости, фазы которых обеспечивают уравновешивание высших гармоник реактивного момента.
Нахождение фаз вращения дебалансных вибраторов происходит путем анализа сигналов кинематических и силовых датчиков вибрации, сигналы которых обрабатываются входящим в систему уравновешивания нейрокомпьютером, который по сигналам датчиков вибраций в поисковом режиме экстремального регулятора производит минимизацию вибрационных сигналов на соответствующих частотах путем поиска абсолютных из относительных фаз пар вращающихся дебалансных вибраторов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВИБРАЦИОННАЯ ТРАНСПОРТИРУЮЩАЯ МАШИНА | 2012 |
|
RU2532235C2 |
| СПОСОБ ВОЗБУЖДЕНИЯ РЕЗОНАНСНЫХ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ | 2010 |
|
RU2441714C1 |
| СПОСОБ УПРАВЛЕНИЯ ВОЗДЕЙСТВУЮЩЕЙ СИЛОЙ (ВАРИАНТЫ) И РЕГУЛИРУЕМЫЙ ВИБРАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2531518C1 |
| ВИБРОПРИВОД ДЛЯ СОЗДАНИЯ БИГАРМОНИЧЕСКИХ РЕЖИМОВ КОЛЕБАНИЙ | 2012 |
|
RU2499099C1 |
| СПОСОБ ВОЗБУЖДЕНИЯ КОЛЕБАНИЙ | 2019 |
|
RU2716862C1 |
| Способ настройки оптимального режима работы дебалансных роторных механизмов и устройство для его осуществления | 2022 |
|
RU2785473C1 |
| САМОБАЛАНСНАЯ ВИБРОЩЕКОВАЯ ДРОБИЛКА | 1995 |
|
RU2097131C1 |
| ВИБРАЦИОННЫЙ ПРИВОД ДЛЯ МАШИН С КРУГОВЫМИ КОЛЕБАНИЯМИ РАБОЧЕГО ОРГАНА | 1990 |
|
RU2028264C1 |
| КОНУСНАЯ РОТОРНАЯ ДРОБИЛКА | 2015 |
|
RU2595145C1 |
| СПОСОБ ВОЗБУЖДЕНИЯ ВИБРАЦИОННЫХ КОЛЕБАНИЙ ДЛЯ ПРОВЕДЕНИЯ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ И ДЕБАЛАНСНЫЙ ВИБРОВОЗБУДИТЕЛЬ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2387488C1 |



Изобретение относится к машиностроению, а именно к технике уравновешивания роторных машин. Способ уравновешивания вибрационных нагрузок в роторных машинах заключается в том, что в корпусе роторной машины размещают два механизма, в которых размещают вращаемые управляемыми электроприводами дебалансные вибраторы. Одним механизмом создают вектор силы, вращающийся в плоскости, перпендикулярной оси вала, и настраивают его по модулю от нулевого значения до максимальной величины и меняют фазу вращения суммарного вектора. По модулю величина силы может пульсировать с более высокой частотой, кратной частоте вращения, а другим механизмом создают момент сил, вектор которого направлен по оси вращения ротора, при этом по модулю этот вектор изменяют по гармоническому или полигармоническому закону. Устройство уравновешивания вибрационных нагрузок в роторных машинах содержит блок синхронизации, обеспечивающий противофазность движения инерционной массы движению источника колебаний. Блок синхронизации выполнен в виде двух механизмов, в каждом из которых расположены четыре дебалансных вибратора с равными дебалансами, которые располагаются как на равных расстояниях от оси ротора, причем вибраторы вращаются с оборотами, равными оборотам ротора, так и симметрично относительно оси вала. Вибраторы вращаются синхронно таким образом, что их векторы сил всегда параллельны, а суммарный вектор проходит через ось вала. Взаимная ориентация фаз двух пар дебалансных вибраторов от 0 до 180 градусов изменяет величину модуля суммарного вектора дебаланса от нуля до максимума. На основное вращение дебалансных вибраторов обоих механизмов накладываются пульсации угловой скорости, фазы которых обеспечивают уравновешивание высших гармоник реактивного момента. Нахождение фаз вращения дебалансных вибраторов происходит путем анализа сигналов кинематических и силовых датчиков вибрации, сигналы которых обрабатываются входящим в систему уравновешивания нейрокомпьютером, который по сигналам датчиков вибраций в поисковом режиме экстремального регулятора производит минимизацию вибрационных сигналов на соответствующих частотах путем поиска абсолютных или относительных фаз пар вращающихся дебалансных вибраторов. Техническим результатом является повышение эффективности уравновешивания вибрационных нагрузок в роторных машинах. 2 н.п. ф-лы, 5 ил.
| Гаситель колебаний | 1985 |
|
SU1373928A1 |
| ГРУЗ ДЛЯ БАЛАНСИРОВКИ РОТОРОВ ТУРБОМАШИН | 1999 |
|
RU2193766C2 |
| Способ определения плотности разрядов молнии в землю | 1987 |
|
SU1536336A1 |

