(54) СПОСОБ АВТОНОМНОГО ОПРЕДЕЛЕНИЯ МАЛЫХ УГЛОВЫХ
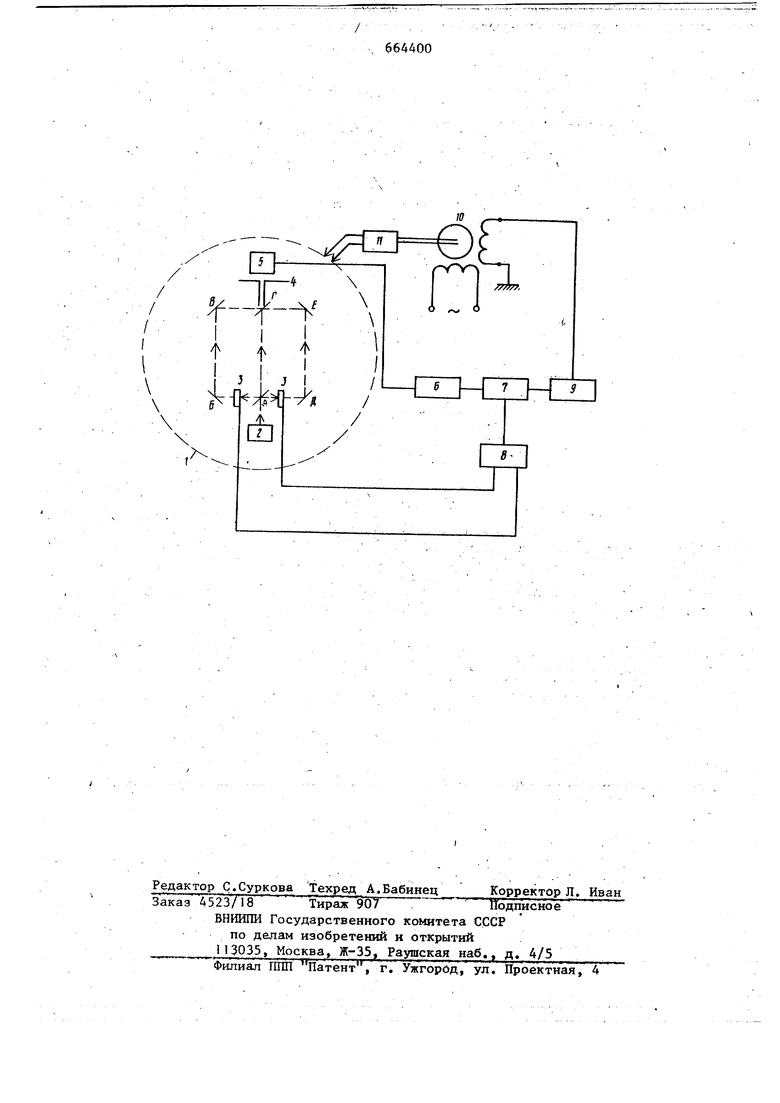
ПЕРЕМЕЩЕНИЙ ОБЪЕКТА :; -:-:;. V Л раном 4 сд щелью, за которым; установлен, фотоумножитель 5, соединеимый с Ш1зкоча1ст6тным узкополосным фильтром 6, выход которого соединен с фазовым дискриминатором 7, соединенным с гене ратором 8 коммутатора 3 и с усилителем сервопривода 9, связанного с пово ротной платформой 1 через исполнительный двигатель 10 с редуктором 1Ь Углрв ая скорость объекта определиется методом оптической интерферометрии путем измерения разности хода двух световых лучей. Интерференционная картина на экране 4 образуется за счет взаимодействия явух лучей; луча, прошедшего цуть от точки А до Г, и одного из лучей, прошедших контур АБВТ или АДЁГ. При врайгении объек та, например,- по .часовой стрелке, луч, прошедший контур АБВГ, будет сов падать с направлением вращения, а луч прошедший контур АДЕГ, направлен в пр тивоположную сторону За счет коммутации лучей коммутатором 3 с Частотой генератора 8 создается модуляция интерфе рёнцйоннойкартин:ьГ на экране в случае абсолготрого вращения платформы 1 т.ё, врйщЬния относительно системы отсчёта, определяемой йепбДвййсйыШ звездами. Фртрток фотоумножителя 5 пр :|2§;№м.г;тан6вйтся пёриоди ч функцией, прбпЬрцйр нальной световому пото- Icy, проходящему через щель экрана 4. Фильтр 6 выделяет из этой функций гармоническую составляющую ча стьты генератора 8. При помощи фазового дис криминатора 7 осуществляется селекция сигнала по направлению вращения объек та, который затем через сервоусилитель 9 вызывает вращение исполнительно го двигателя 10 и через редуктор 11 врЩёниё платформы в сторону, противбйодажную вращению объекта. Опредёлёние угловойскор|Ьсти предлaгae ьIм способом осуществпяётсяс чувствителы остью fflvy,iv,i jg где д 664400разность хода двух светобЫх лучей при вращении установки по часовой стрелке, а затем в противоположном направении;С - скорость света; S - проекция контура на штос- кость, перпендикулярную к оси вращения. Чувствительность обнаружения измерения малых разностей фаз может быть существенно повышена при помощи микрофазометрических измерений и доведена до величины порядка одной угловой секунды. Возможность измерения угловых скоростей порядка 0, РЗД позволяет использовать ч ; . , предлагаемый способ при построении систем стабилизации курса.; Формула изобретения . Способ автономного определения малых угловых перемещений объекта, ос,нрванньй на использовании эффекта ,Саньяка, о т д и ч а ю щ и и с я тем, что, с целью повьш1ения чувствительности измерений, луч мощного источника излучения, например квантовомеханического генераторэ, при помо.щи оптических средств расчленяют на три луча, один из которых направляют к экрану со щелью по кратчайшему пути а два других - по контурам равной площади в противрположных направлениях так, чтобы они поочередно при помощи коммутации интерферировали с первым лучом, создавая на щели модуляцию освещенности, которая при помощи фотопреобразователя и синхронного приемника образует на выходе последнего CHrnajj, пропорциональный по величине угловой скорости вращения объекта, а по фазе - направлению вращения.
/
t t