Изобретение относится к оборонной технике, а именно к радиотехническим системам наведения оружия, размещенного на подвижных объектах - носителях оружия, и может использоваться на вертолетах для борьбы с танками, катерами, вертолетами и другими целями.
Вооружение боевого вертолета должно обеспечивать эффективную стрельбу по малоразмерным наземным, надводным и воздушным целям на дальности прямой видимости (до 10-15 км) при относительно малых размерах, массе, а также обеспечивать малое время реакции и низкую стоимость решения боевой задачи.
Известный противотанковый комплекс “Хот” (см., например, Шунков В.Н. Ракетное оружие. - Минск: Попурри, 2001, с. 332-333), которым оснащаются боевые вертолеты РАН-1, РАН-2 вооруженных сил Франции и Германии, имеет систему наведения, которая является аналогом заявляемой и содержит оптический прицел, оптический (инфракрасный) пеленгатор излучения ракеты, вычислитель (счетно-решающее устройство) и аппаратуру передачи по проводам команд управления на управляемые ракеты (УР), установленные на пусковых установках (подвесках) вертолета и содержащие блок управления, реактивные двигатели и источник инфракрасного (ИК) излучения. Работа такой системы наведения происходит следующим образом.
Сначала выбирают с помощью оптического прицела цель для атаки, после чего наводят на цель перекрестье прицела и производят пуск управляемой ракеты. При этом вертолет пилотируют так, чтобы цель, по возможности, оставалась в перекрестье прицела. После старта в заднем торце ракеты зажигают яркий источник излучения (трассер), которое принимают пеленгатором, измеряют угловые координаты источника излучения в системе координат оптического прицела и отображают положение ракеты на индикаторе, встроенном в оптический прицел, в виде световой отметки ракеты, которую также наблюдают в окуляр прицела. Задачу наведения ракеты решают путем совмещения в окуляре прицела отметки ракеты с изображением цели. Управление траекторией движения УР производят с помощью рукоятки пульта управления (кнюппеля), которую наклоняют влево-вправо и вперед-назад, чем формируют соответствующие команды управления траекторией движения УР влево-вправо и вверх-вниз. Команды управления передают на УР по проводам, которые соединяют ее с пультом управления. Изменение длины проводов обеспечивают их разматыванием с катушки, установленной на управляемой ракете.
Недостатками такой системы наведения являются: низкая вероятность попадания в малоразмерную цель из-за недостаточной точности сопровождения цели, обусловленной непосредственным участием летчика-оператора в процессе наведения, т.е. в удержании при ручном наведении совмещенного состояния движущегося изображения цели и подвижной отметки ракеты; ограниченная возможность маневрирования вертолета при наведении, т.е. малые допустимые углы курса и тангажа из-за существенного снижения точности наведения при больших углах маневрирования, и ограниченная дальность пусков из-за опасности обрыва проводов, что снижает живучесть вертолета при действии против него огневых средств противника; невозможность использования системы в условиях нарушения оптической видимости, т.е. при низком уровне освещенности, наличии дождя, пыли, дыма или тумана, т.к. это маскирует цель и/или ракету и нарушает процесс наведения.
Недостатки, связанные с ограничениями на маневренность вертолета, устранены в известной системе управления вооружением летательного аппарата, приведенной в описании изобретения к патенту RU 2150070 С1, кл. F 41 G 3/22, 2000, которая является ближайшим аналогом предлагаемой системы наведения оружия и содержит бортовые радиолокационную и оптиколокационную станции, бортовые комплексы аппаратуры наведения (автоматической радиолинии) и навигационного оборудования, индикаторы прицельной, навигационной и пилотажной информации, комплекс радиотелеметрической связи и целераспределения в групповом бою, через линии передачи информации подключенные к бортовой цифровой вычислительной машине (вычислителю) и к двум оконечным устройствам, связанным через блоки управления с пультами задания режимов и оперативной настройки (пультами управления).
Работа такой системы происходит следующим образом. Сначала производят поиск цели, перемещая поле зрения бортовой оптиколокационной станции (БОЛС) по зоне обзора либо устанавливая поле зрения БОЛС на цель, обнаруженную радиолокационной станцией. Видеоизображение поля зрения БОЛС выводят на прицельный индикатор. Если цель для атаки выбрана, то совмещают центр поля зрения БОЛС с целью и с пульта управления подают команду “Захват”, которой включают режим слежения БОЛС за целью. Этим обеспечивают независимость “захваченного” поля зрения от пространственной ориентации вертолета. Угловое положение линии визирования цели в БОЛС измеряют датчиками угла азимута и угла места в системе координат, связанной с вертолетом, и передают их в вычислитель. После команды “Захват” положение изображения цели на экране прицельного индикатора не зависит от маневрирования вертолета, чем облегчается процесс прицеливания.
Для проведения стрельбы ракетой вертолет разворачивают в сторону цели так, чтобы линия визирования цели соответствовала направлению пуска ракеты, находящейся на подвеске вертолета. Затем с пульта управления подают команду “Пуск”, по которой производят подготовку к пуску и старт ракеты. Одновременно с этим на экране индикатора формируют прицельную марку (курсор), положением которой указывают текущее положение ракеты в системе координат индикатора, а изменение положения прицельной марки на экране индикатора производят по сигналам с пульта управления и значения устанавливаемых координат прицельной марки выдают с пульта управления в вычислитель.
После схода ракеты с подвески вертолет может изменять свою пространственную ориентацию в широком диапазоне углов. На экране индикатора по информации БОЛС наблюдают неподвижное изображение атакуемой цели и подвижную отметку ракеты. Задачу наведения управляемой ракеты на цель сводят к совмещению прицельной марки на экране индикатора с отметкой ракеты, при этом в вычислителе производят расчет углов рассогласования между линией визирования ракеты, соответствующей положению прицельной марки, удерживаемой летчиком-оператором на отметке ракеты, и линией визирования цели, за которой следит БОЛС, в горизонтальной и вертикальной плоскостях, пересчитывают их в параметры команд управления траекторией ракеты, которые затем пересылают в аппаратуру наведения (автоматическую радиолинию) и далее передают эти команды на ракету для их отработки, что сводит к нулю отклонения линии визирования ракеты от линии визирования цели; так обеспечивается управление траекторией полета ракеты, что отображается на экране индикатора сближением отметки ракеты с изображением цели.
Таким образом, в процессе наведения ракеты на цель образуется замкнутый контур полуавтоматического наведения, одним из звеньев которого является летчик-оператор и в котором наведение прицельной марки на цель производится вручную, а управление ракетой - автоматически с помощью командной системы управления с передачей команд по радиолинии.
Однако рассмотренная полуавтоматическая система наведения обладает двумя существенными недостатками: во-первых, недостаточной вероятностью попадания в малоразмерную цель из-за ошибок наведения ракеты, обусловленных непосредственным участием летчика-оператора в процессе наведения; во-вторых, невозможностью использования системы в условиях нарушения оптической видимости, т.е. при низком уровне освещенности, наличии дождя, пыли, дыма или тумана, т.к. это маскирует цель и/или ракету и нарушает процесс наведения.
Задачей предлагаемого технического решения является автоматизация процесса наведения, исключающая ошибки наведения, обусловленные непосредственным участием летчика-оператора, и обеспечение возможности применения системы в условиях нарушения оптической видимости цели.
Решение указанной задачи достигается за счет того, что вертолетная система наведения оружия, содержащая установленные на вертолете вычислитель, передатчик, датчики угла азимута и угла места, индикатор, пульт управления, снабжена антенной, установленной на заднем торце ракеты, приемником ракеты, дешифратором команд, блоком управления, синхронизатором ракеты, измерителем угловых отклонений, при этом антенна соединена со входом приемника ракеты, выход которого подключен к входу дешифратора команд, а первый вход блока управления подключен к выходу дешифратора команд, а также установленными на вертолете формирователем команд, блоком управления приводом антенны, приводом антенны, блоком сопряжения, антенным устройством с электронным управлением луча, приемником, аналого-цифровым преобразователем, процессором сигналов, вторым вычислителем, блоком электронного управления антенной и синхронизатором, при этом первый вход передатчика подключен к первому выходу формирователя команд, выход датчика угла азимута и выход датчика угла места связаны соответственно с первым и вторым входами первого вычислителя, выход первого вычислителя соединен с первым входом блока управления приводом антенны, выход которого подключен к входу привода антенны, а первый выход пульта управления соединен с первым входом блока сопряжения, первый выход которого подключен к второму входу блока управления ракеты, первый вход синхронизатора ракеты подключен к второму выходу дешифратора команд, второй вход - к второму выходу блока сопряжения, а первый выход - к второму входу приемника ракеты, первый вход измерителя угловых отклонений подключен ко второму выходу приемника ракеты, второй вход - к второму выходу синхронизатора ракеты, выход - к третьему входу блока управления, а второй вход дешифратора команд подключен к третьему выходу блока сопряжения, при этом вход антенного устройства подключен к выходу передатчика, выход антенного устройства подключен к последовательно соединенным приемнику и аналого-цифровому преобразователю, выход которого подключен к первому входу процессора сигналов, второй вход которого соединен с четвертым выходом второго вычислителя, первый выход процессора сигналов соединен с первым входом второго вычислителя, а второй выход процессора сигналов - с индикатором, второй вход второго вычислителя соединен со вторым выходом пульта управления, третий вход второго вычислителя связан с первым выходом синхронизатора, первый выход второго вычислителя подключен к блоку электронного управления антенной, выход которого соединен со вторым входом антенного устройства, второй выход второго вычислителя подключен к первому входу формирователя команд, третий выход второго вычислителя подключен к третьему входу первого вычислителя, второй, третий, четвертый и пятый выходы синхронизатора соединены соответственно со вторым входом блока сопряжения, со вторым входом передатчика, со вторым входом формирователя команд и со вторым входом аналого-цифрового преобразователя, второй выход формирователя команд подключен к третьему входу блока сопряжения, четвертый вход первого вычислителя подключен к пилотажно-навигационному комплексу вертолета, а второй вход блока управления приводом антенны соединен с третьим выходом пульта управления.
На фиг.1 представлена блок-схема предлагаемой вертолетной системы наведения оружия; на фиг.2 - блок-схема антенного устройства с электронным управлением луча; на фиг.3 - схема конического сканирования диаграммы направленности антенного устройства и эпюры изменения амплитуды сигналов для различного положения цели относительно оси вращения диаграммы направленности; на фиг.4 - блок-схема приемника ракеты; на фиг.5 - блок-схема измерителя угловых отклонений ракеты.
Вертолетная система наведения оружия (фиг.1) содержит установленные на управляемой ракете 1 антенну 2 ракеты, расположенную на заднем торце ракеты, приемник 3 ракеты, дешифратор команд 4, блок управления 5, синхронизатор 6 ракеты и измеритель угловых отклонений 7. На вертолете установлены первый вычислитель 8, формирователь команд 9, передатчик 10, блок управления 11 приводом антенны, привод 12 антенны, датчики угла азимута 13 и угла места 14, индикатор 15, пульт управления 16, блок сопряжения 17. На вертолете размещены также антенное устройство 18 с электронным управлением луча, приемник 19, аналого-цифровой преобразователь 20, процессор сигналов 21, второй вычислитель 22, блок электронного управления 23 антенной и синхронизатор 24.
На управляемой ракете антенна 2 ракеты соединена с первым входом приемника 3 ракеты, первый выход которого подключен к первому входу дешифратора команд 4, а первый вход блока управления 5 ракетой подключен к первому выходу дешифратора команд. Первый вход синхронизатора 6 ракеты подключен к второму выходу дешифратора команд 4, второй вход синхронизатора 6 - к второму выходу блока сопряжения 17, а первый выход синхронизатора 6 - к второму входу приемника 3 ракеты. Первый вход измерителя угловых отклонений 7 ракеты подключен к второму выходу приемника 3 ракеты, второй вход измерителя угловых отклонений 7 - к второму выходу синхронизатора 6 ракеты, выход измерителя угловых отклонений 7 - к третьему входу блока управления 5. Второй вход дешифратора команд 4 управляемой ракеты подключен к третьему выходу блока сопряжения 17.
На вертолете первый вход передатчика 10 подключен к первому выходу формирователя команд 9, выходы датчика угла азимута 13 и датчика угла места 14 связаны соответственно с первым и вторым входами первого вычислителя 8, выход первого вычислителя 8 соединен с первым входом блока управления 11 приводом антенны, выход которого подключен к входу привода 12 антенны. Первый выход пульта управления 16 соединен с первым входом блока сопряжения 17, первый выход которого подключен к второму входу блока управления 5 управляемой ракеты. Первый вход антенного устройства 18 подключен к выходу передатчика 10. Выход антенного устройства подключен к последовательно соединенным приемнику 19 и аналого-цифровому преобразователю 20, выход которого подключен к первому входу процессора сигналов 21, второй вход которого соединен с четвертым выходом второго вычислителя 22.
Первый выход процессора сигналов 21 соединен с первым входом второго вычислителя 22, а второй выход процессора сигналов 21 - с индикатором 15. Второй и третий входы второго вычислителя 22 соединены соответственно со вторым выходом пульта управления 16 и первым выходом синхронизатора 24. Первый выход второго вычислителя 22 подключен ко входу блока электронного управления 23 антенной, выход которого соединен со вторым входом антенного устройства 18. Второй выход второго вычислителя 22 подключен к первому входу формирователя команд 9. Третий выход второго вычислителя 22 подключен к третьему входу первого вычислителя 8. Второй, третий, четвертый и пятый выходы синхронизатора 24 соединены соответственно со вторым входом блока сопряжения 16, со вторым входом передатчика 10, со вторым входом формирователя команд 9 и со вторым входом аналого-цифрового преобразователя 20. Второй выход формирователя команд 9 подключен к третьему входу блока сопряжения 17. Четвертый вход первого вычислителя 8 подключен к пилотажно-навигационному комплексу вертолета. Второй вход блока управления 11 приводом антенны соединен с третьим выходом пульта управления 16.
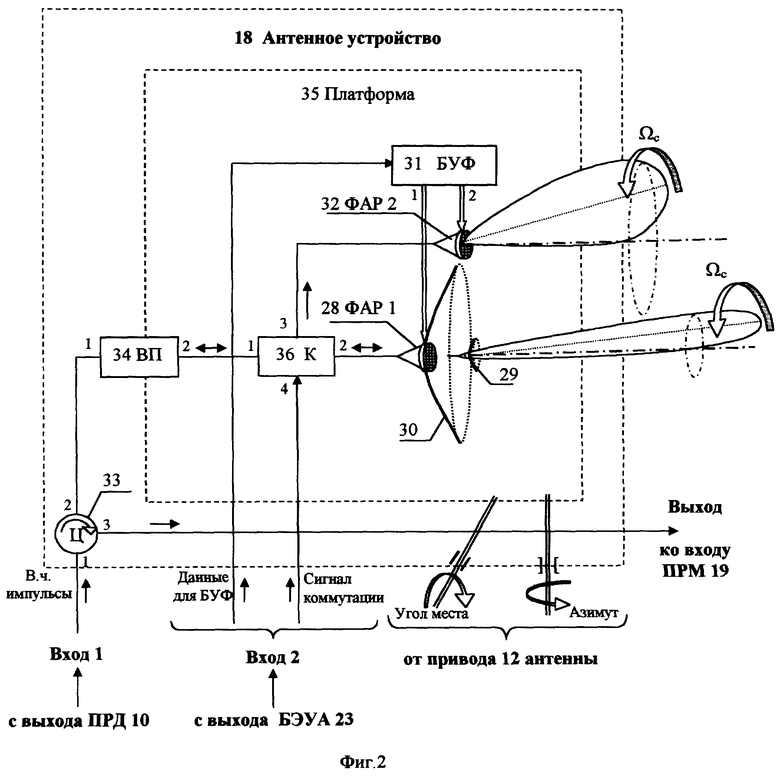
Антенное устройство 18 (фиг.2) содержит первую фазированную антенную решетку (ФАР) 28 проходного типа, которая является облучателем двухзеркальной антенной системы Кассегрена с контррефлектором 29 и рефлектором 30, формирующую луч с узкой диаграммой направленности (см., например, Справочник по радиолокации. - М.: Советское радио, 1977, т.2 “Радиолокационные антенные устройства”, с. 112-114, 183-184). Фазированная антенная решетка 28 содержит облучатель, коллимирующую линзу, а также входные и выходные элементарные излучатели, соединенные через ферритовые фазовращатели (см., например, указанный Справочник по радиолокации, т.2, с. 183-188). Управление фазовращателями производится через первый выход блока управления 31 фазовращателями (БУФ). Антенное устройство 18 содержит также вторую фазированную антенную решетку 32, аналогичную первой, но формирующую широкий луч. Блок управления 31 фазовращателями управляет ферритовыми фазовращателями фазированных антенных решеток 28, 32 поочередно, первой фазированной антенной решеткой 28 через первый выход, второй фазированной антенной решеткой 32 через второй выход. Антенное устройство 18 содержит также циркулятор 33, вращающиеся переходы 34 и коммутатор 36, обеспечивающие совместно с фидерными трактами передачу высокочастотных зондирующих сигналов от передатчика 10 к ФАР 28, 32 и принятых эхо-сигналов от ФАР 28 к приемнику 19.
Первое плечо циркулятора 33 является первым входом антенного устройства 18, через который поступают зондирующие импульсы от передатчика 10. Второе плечо циркулятора 33 соединено с неподвижным (первым) плечом вращающихся переходов 34, которые обеспечивают движение подвижной части антенного устройства 18 - платформы 35 в двух взаимно перпендикулярных плоскостях (по азимуту и углу места) без нарушения тракта прохождения высокочастотных сигналов при повороте платформы 35. Третье плечо циркулятора 33 является (см. фиг.2) выходом антенного устройства 18, который подключен ко входу приемника 19. Второе плечо вращающихся переходов 34 соединено с первым плечом коммутатора 36, который в нормально замкнутом положении соединяет первое плечо со вторым плечом, соединенным фидером с первой ФАР 28, а при наличии сигнала коммутации на четвертом управляющем входе соединяет первое плечо с третьим плечом, соединенным со второй ФАР 32.
Все элементы антенного устройства 18 кроме циркулятора 33, неподвижной части вращающихся переходов 34 и внешних окончаний гибких электрических соединений, подводящих сигналы к блоку управления фазовращателями 31 и к коммутатору 36 от второго входа антенного устройства 18, жестко закреплены на платформе 35, которая допускает поворот в угловом секторе ±60° по азимуту и углу места с помощью привода 12 антенны, причем ориентация платформы 35 контролируется датчиками углов 13 и 14. Вход БУФ 32 и четвертый вход коммутатора 36 подключены к выходу блока электронного управления 23 антенной. При работе в режиме обнаружения целей для формирования диаграммы направленности используется только ФАР 28.
Блок управления фазовращателями 31 представляет собой цифроаналоговый преобразователь, формирующий электрические импульсные сигналы установки степени намагничивания каждого из ферритовых фазовращателей в ФАР, пропорциональные численным значениям соответствующих цифровых данных, поступающих от блока электронного управления 23 антенной.
Предлагаемая система управления оружием работает следующим образом.
Первоначально решают задачу обнаружения целей. В этом режиме аппаратура системы наведения, установленная на вертолете, работает как импульсно-доплеровская радиолокационная система, в которой антенное устройство 18 совершает обзор заданной части пространства с помощью привода антенны в соответствии с управляющими сигналами с пульта управления 16 на блок управления приводом 11 антенны, а также на второй вычислитель 22. С 3-го выхода синхронизатора на второй вход передатчика 10 подаются периодические импульсные сигналы, в соответствии с которыми передатчиком генерируются импульсные сигналы с высокочастотным заполнением, подаваемые на 1-й вход антенного устройства 18. Сигналы передатчика 10 затем поступают на первый вход циркулятора 33, затем на его второе плечо и далее на первое плечо вращающихся переходов 34, которые обеспечивают прохождение высокочастотных сигналов на 1-е плечо коммутатора 36. Коммутатор 36 находится в положении, обеспечивающем прохождение высокочастотных сигналов между 1-м и 2-м плечами и обратно. Управляющими сигналами от блока электронного управления 23 антенной блок управления формирователями 31 устанавливает фазовращатели ФАР 28 в исходное положение, при котором максимум диаграммы направленности узкого луча антенного устройства совпадает с его оптической осью, т.е. геометрическим местом точек, совпадающим с нормалью к плоскости раскрыва рефлектора 30. Далее сигналы передатчика 10 подаются на ФАР 28 и через двухзеркальную систему формирования узкого луча излучаются в направлении цели как зондирующие сигналы.
Одновременно с этим с третьего плеча циркулятора 33 на вход приемника 19 подаются эти же высокочастотные сигналы меньшей мощности для подстройки частоты гетеродина приемника 19, что обеспечивает когерентную обработку эхо-сигналов, приходящих на вход приемника.
Отраженные от цели 25 эхо-сигналы принимаются через ФАР 28 узким лучом антенного устройства 18 и по цепочке: зеркальная система 30, 29 - ФАР 28 - 2-е и 1-е плечо коммутатора 36 - вращающиеся переходы 34 - 2-е и 3-е плечо циркулятора 33 - выход антенного устройства 18 поступают на вход приемника 19, преобразующего их на промежуточную частоту; преобразованные сигналы усиливают и детектируют в амплитудно-синхронном детекторе приемника 19. С выхода приемника 19 эхо-сигналы в виде видеоимпульсов поступают на аналогово-цифровой преобразователь 20, где производят их преобразование в цифровую форму (квантуют по времени и амплитуде), после чего выдают в процессор сигналов 21.
В процессоре сигналов 21 производят накопление, свертку, пороговую обработку, а также дальномерные и доплеровские измерения и привязку принятого эхо-сигнала к угловому положению луча антенного устройства 18 при прохождении луча антенного устройства через цель, в результате которых определяют координаты и радиальную скорость цели при каждом периоде обзора пространства лучом антенного устройства 18. С 1-го выхода процессора сигналов 21 цифровые данные о параметрах цели, полученные в каждом периоде обзора, передаются во второй вычислитель 22, где по нескольким периодам обзора производят завязку трассы цели, уточняют ее координаты и скорость. Кроме того, процессор сигналов формирует видеоинформацию о целях, предназначенную для отображения на индикаторе 15 в каждом периоде обзора.
Процессор сигналов 21 может быть реализован, например, на специализированной комбинированной многопроцессорной ЭВМ для обработки радиолокационных сигналов и для решения задач управления в реальном масштабе времени типа “Багет-55-04” (см. Каталог продукции конструкторского бюро “Корунд-М” “Багет-семейство ЭВМ для специальных применений”, изд.3-е. - М., 2000, с.19). Эта ЭВМ состоит из программируемого процессора сигналов и управляющего вычислительного устройства, объединенных общей магистралью цифрового обмена, а также имеет модули интерфейса для внешнего обмена информацией. Эта ЭВМ имеет открытую архитектуру, т.е. может быть дополнена графическим контроллером, например мезонинной платой типа БТМ 23-01 (см. указанный Каталог, с. 37), с помощью которого цифровая информация о координатах целей преобразуется в видеоинформацию и выдается через второй выход процессора сигналов 21 на вход индикатора 15.
Второй вычислитель 22 управляет работой процессора сигналов 21 и первого вычислителя 8 в различных режимах работы системы наведения по командам с пульта управления 16, а также выдает данные для работы процессора сигналов 21, первого вычислителя 8, блока электронного управления 23 антенным устройством и формирователя команд 9.
Второй вычислитель 22 может быть реализован, например, на ЭВМ для управления объектами в реальном масштабе времени типа “Багет-53” (см. указанный выше Каталог продукции конструкторского бюро “Корунд-М”, с. 13). Эта ЭВМ состоит из процессора, оперативного и репрограммируемого запоминающих устройств, модулей интерфейса для обмена информацией с внешними устройствами по стандарту ARINC 429 и по стандарту MIL STD 1553 В, объединенных общей магистралью цифрового обмена. Эта ЭВМ имеет открытую архитектуру и может быть дополнена модулем параллельного интерфейса по ГОСТ 26765.51-86 для обмена информацией с другими ЭВМ или цифровыми блоками.
Обнаруженные цели в виде яркостных отметок отображаются в прямоугольных координатах на экране индикатора 15, который представляет собой устройство отображения телевизионного типа, например цифровой дисплей. По изображению на экране анализируют радиолокационную информацию, т.е. отметки подвижных целей и неподвижных местных предметов, и производят выбор цели для атаки. Одновременно с радиолокационной информацией процессор сигналов 21 формирует и выдает на индикатор 15 дополнительную информацию, такую как шкала дальности, символы подвижных целей, прицельную марку, буквенно-цифровые сообщения о состоянии оружейных подвесок вертолета, готовность ракеты к пуску, сообщения о выходе цели из допустимой зоны по дальности и углам, пилотажные и навигационные параметры вертолета.
Экранные координаты прицельной марки так же, как и радиолокационная информация, привязаны к связанной с вертолетом системе координат. Управление положением прицельной марки на экране производят через пульт управления 16 и второй вычислитель 22, который выдает данные об устанавливаемых с пульта 16 координатах прицельной марки в видеоконтроллер процессора сигналов 21 через второй вход процессора сигналов.
Летчик-оператор, наблюдая на экране индикатора 15 фоноцелевую обстановку, выбирает цель для обстрела и накладывает на нее прицельную марку, используя пульт управления 16, после чего с пульта управления выдает команду “Захват”, которая поступает во второй вычислитель 22, и включает режим захвата цели. При этом во втором вычислителе 22 включается алгоритм сопровождения цели 25 по дальности и вырабатывается и выдается в первый вычислитель 8 целеуказание для поворота подвижной части антенного устройства 18 (платформы 35) в направлении на цель. В качестве исходных данных для такого целеуказания используются экранные координаты прицельной марки. Первый вычислитель 8, который может быть реализован, например, на техническом средстве того же типа, что и второй вычислитель 22, т.е. на ЭВМ “Багет-53”, вырабатывает цифровые данные для блока управления 11 приводом антенны по азимуту и углу места, в котором они преобразуются в аналоговые сигналы, поступающие затем на привод 12 антенны. Платформа 35 антенного устройства 18 начинает поворачиваться исполнительными элементами привода 12 таким образом, чтобы максимум диаграммы направленности узкого луча был установлен в направлении на цель, т.е. в положение, при котором показания датчиков углов 13 и 14, переданные в первый вычислитель 8, где их сравнивают с заданным целеуказанием, совпадут с последним. После того, как заданные углы отработаны антенным устройством 18, включается алгоритм слежения за угловыми координатами цели 25 коническим сканированием узкого луча антенного устройства с частотой Ωс (см., например, М. Сколник. Введение в технику радиолокационных систем. - М.: Мир, 1965, с. 214-217).
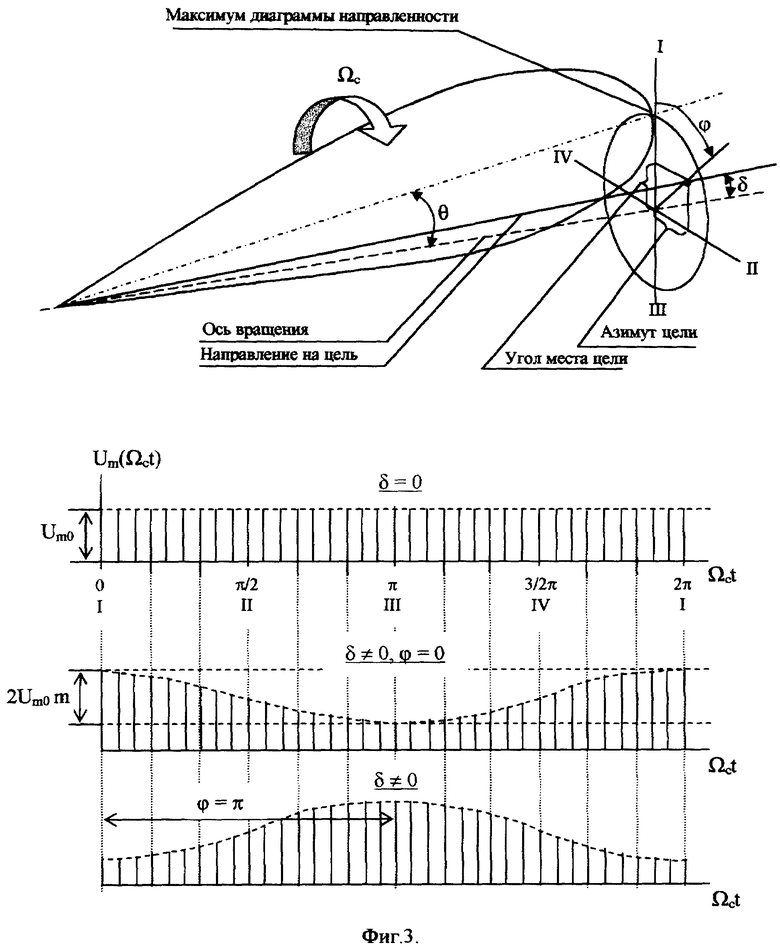
Коническое сканирование луча производят вокруг оси, первоначально определяемой положением центра прицельной марки при выдаче команды на захват цели, но по мере работы колец слежения за угловым положением цели рассогласование между линией визирования 26 цели и равносигнальным направлением луча уменьшается до определенного уровня, при котором второй вычислитель 22 сформирует признак исполнения команды “Захват”, который отображается на экране индикатора 15 соответствующим сообщением для летчика-оператора. Рассмотрим этот процесс подробнее. Частота сканирования Ωс задается синхронизатором 24, который выдает в реальном времени цифровые данные о текущей фазе колебаний частоты Ωс через 1-й выход на 3-й вход второго вычислителя 22, при этом частота дискретизации Ωдс, т.е. частота изменения положения сканирующего луча в пространстве, выбирается намного большей частоты конического сканирования, например Ωдс=16Ωс. Для увеличения быстродействия системы слежения частота конического сканирования должна составлять несколько десятков оборотов в секунду, например, Ωс=100·2π радиан/с. Во втором вычислителе 22 этот сигнал частоты Ωс используется, во-первых, для электронного управления коническим сканированием луча антенны, во-вторых, в качестве опорного сигнала для измерения углового отклонения равносигнального направления сканирующего луча от линии визирования цели в интересах парирования этих отклонений путем перемещения оси сканирования платформы 35 антенного устройства 18 в нужную сторону.
Синхронизатор 24 представляет собой устройство, обеспечивающее синхронную работу составных частей системы наведения, и содержит задающий генератор, делители частоты и схемы формирования: высокостабильных импульсных сигналов для запуска передатчика 10 и аналого-цифрового преобразователя 20; цифрового и аналогового сигналов частоты конического сканирования луча, первый из которых подается в реальном времени на второй вычислитель 22, а второй - в блок сопряжения 17, где он используется для предстартовой установки фазы колебаний частоты Ωс синхронизатора 6 ракеты; импульсных сигналов, выдаваемых в формирователь команд 9 при прохождении фазы частоты Ωс через 0 и через π, для формирования им соответствующих синхромаркеров (маркеров) М0 и Мπ с целью последующего включения их в состав данных, передаваемых на управляемую ракету.
Коническое сканирование узкого луча производят следующим образом. Во втором вычислителе 22 включают алгоритм, циклически вычисляющий направляющие косинусы для управления фазовращателями ФАР 28, обеспечивающие установку максимума диаграммы направленности узкого луча под углом θ к оси вращения луча, т.е. под углами θаз(ti) по азимуту и θум(ti) по углу места, в дискретные моменты времени ti с интервалом τдc=ti+1-ti, который в нашем примере составляет τдc=1/1600=0,625 мс. В каждый момент времени ti значения направляющих косинусов луча соsθаз(t), соsθум(t) являются функциями текущей фазы ϕ опорного колебания с частотой Ωс:

Угол сканирования луча θ выбирают таким образом, чтобы уровень пересечения диаграмм направленности в противоположных точках конуса, описываемого лучом, был не более 3 дБ относительно максимума диаграммы направленности, например составляет 1,5 дБ.
Для каждого момента времени ti значения направляющих косинусов для узкого луча из второго вычислителя 22 пересылаются в блок электронного управления 23 антенной, в котором производится расчет соответствующих им фазовых сдвигов высокочастотных сигналов для каждого элемента ФАР 28 с учетом геометрии решетки и оптической схемы формирования диаграммы направленности при похождении электромагнитных колебаний радиосигнала через двухзеркальную систему Кассегрена, длины волны излучаемых высокочастотных сигналов. Эти данные затем передаются на второй вход антенного устройства 18, откуда они поступают в блок управления 31 фазовращателями, где производится их преобразование из цифровой формы в аналоговую и передача в виде управляющих импульсных напряжений на обратимые ферритовые фазовращатели ФАР 28, которые обеспечивают необходимое фазирование проходящих через них высокочастотных сигналов как в сторону цели, так и в обратном направлении. В результате этого процесса в момент времени ti формируется луч, ориентированный в заданном направлении, и его положение сохраняется постоянным до следующего момента времени ti+1, при котором весь процесс повторяется. За один период частоты сканирования Ωс луч совершает полный оборот вокруг равносигнальной оси (оси вращения), совпадающей с оптической осью антенного устройства 18 (см. фиг.3). При отклонении равносигнальной оси луча от направления на цель 25 на угол δ амплитуда отраженных от цели и принимаемых антенным устройством 18 импульсных эхо-сигналов Uδ(t) изменяется в зависимости от времени по закону, близкому к гармоническому, с круговой частотой, равной угловой скорости вращения луча Ωс:

где Um0 - амплитуда, соответствующая нахождению цели на оси вращения диаграммы направленности антенны; m - глубина модуляции, являющаяся функцией δ; ϕ - начальная фаза.
При малых угловых отклонениях δ оси вращения диаграммы направленности луча от направления на цель значение m практически линейно зависит от этого отклонения, а фаза ϕ гармонической огибающей импульсов частоты Ωс соответствует направлению отклонения. Таким образом, огибающая амплитуды импульсов однозначно определяет величину и направление отклонения цели 25 от равносигнальной линии, т.е. является сигналом угловой ошибки (рассогласования).
Блок электронного управления 23 антенной может быть реализован, например, на малогабаритной встраиваемой бортовой ЭВМ для управления объектами в реальном масштабе времени типа “Багет-83” (см. указанный ранее Каталог КБ “Корунд-М”, с. 15), дополненной двумя модулями интерфейса БТ83-401, имеющими один мультиплексный канал ГОСТ 26765.52-87 и один канал параллельного интерфейса ГОСТ 26765.51-86.
Отраженные от цели эхо-сигналы принимаются узким лучом, т.е. проходят через систему зеркал на ФАР 28, откуда они через коммутатор 36 и вращающиеся переходы 34 поступают на второе плечо циркулятора 33, который обеспечивает их прохождение на его третье плечо, являющееся выходом антенного устройства 18, а оттуда на вход приемника 19. В приемнике 19 эхо-сигналы преобразуют в сигналы промежуточной частоты, которые усиливают и детектируют в амплитудно-синхронном детекторе приемника 19 и в виде видеоимпульсов эти сигналы передают в аналого-цифровой преобразователь 20, который преобразует их в цифровую форму и выдает в процессор сигналов 21. В процессоре сигналов 21 производят их накопление, свертку, пороговую обработку, а также дальномерные и доплеровские измерения, после чего выдают эти данные во второй вычислитель 22, в котором производится их селекция по дальности и скорости, пиковое детектирование, выделение фильтром-экстраполятором огибающей видеоимпульсов и получается таким образом сигнал рассогласования

Далее этот сигнал подвергается процедуре амплитудно-фазового различения (фазового детектирования) по азимуту и углу места, при этом опорные сигналы для амплитудно-фазового различения U0аз(t)=sinΩсt и U0ум(t)=соsΩсt уже имеются во втором вычислителе 22, так как они используются для расчета направляющих косинусов при коническом сканировании луча. Действие амплитудно-фазового различения эквивалентно перемножению входного Uδ(t) и опорного U0аз(t) или U0ум(t) сигналов и выделению из результата перемножения постоянной составляющей, т.е. сначала получают произведения ΔUаз(t) и ΔUум(t):

а после низкочастотной фильтрации выделяют из них постоянные составляющие сигналов рассогласования по азимуту и углу места соответственно Uаз и Uум:

где δ - угловое отклонение оси вращения луча антенны от направления на цель;
Uаз - сигнал рассогласования по азимуту;
Uум - сигнал рассогласования по углу места.
Эти сигналы рассогласования по азимуту и углу места являются медленно меняющимися функциями времени α(t) и β(t) и используются для расчета и выдачи в первый вычислитель 8 уточненных значений целеуказания. Первый вычислитель 8 производит расчет по ним и выдает уточненные управляющие данные по азимуту и углу места для блока управления приводом 11 антенны, который далее непосредственно управляет приводом 12 антенны так, чтобы уменьшить ошибки рассогласования между осью сканирования луча и направлением на цель. Таким образом замыкаются азимутальное и угломестное кольца слежения за угловым положением цели, что обеспечивает постепенное снижение сигнала рассогласования. Когда сигнал снижается до определенного установленного порога, то во втором вычислителе 22 вырабатывается сигнал признака “Захват”, который выдается через процессор сигналов 21 на индикатор 15 для уведомления летчика-оператора о том, что аппаратура перешла в режим автоматического сопровождения цели, т.е. линия визирования 26 совпала с равносигнальным направлением диаграммы направленности луча антенного устройства 18. По признаку “Захват” второй вычислитель 22 начинает производить расчет угловой скорости линии визирования цели по азимуту и углу места и выдавать ее в формирователь команд 9 на этапах подготовки к старту и наведения управляемой ракеты. Второй вычислитель 22 производит также расчет допустимой зоны пуска управляемой ракеты с учетом характеристик ракеты и дальности до цели и выдает данные о параметрах зоны пуска на видеоконтроллер процессора сигналов 21, который выводит их на индикатор 15.
По этим данным летчик-оператор руководит действиями пилота вертолета, который выводит вертолет на позицию пуска ракеты. Если позиция и ориентация вертолета соответствуют допустимым параметрам зоны пуска, то летчик-оператор подает с пульта управления 16 команду “Пуск”, которая параллельно поступает во второй вычислитель 22 через 1-й вход и в блок сопряжения 17, обеспечивающий предстартовую подготовку и последующий старт управляемой ракеты. По команде “Пуск” аппаратура переводится в режим наведения, при котором сохраняется слежение за захваченной целью, во втором вычислителе 22 запускается циклограмма коммутации мощности передатчика 10 между ФАР 28 и ФАР 32, а также запускается формирователь команд 9 на время подготовки к старту и наведения управляемой ракеты. Эта циклограмма представляет собой следующие друг за другом команды для блока электронного управления 23 антенной с интервалом времени, равным одной четвертой периода частоты сканирования луча антенны, по которым в блоке электронного управления 23 антенной формируются и передаются в антенное устройство 18 сигналы переключения коммутатора 36, обеспечивающие попеременное соединение первого плеча коммутатора со вторым плечом или третьим плечом.
Одновременно с этим в блоке электронного управления 23 антенной в каждом пакете данных управления фазовращателями 31 добавляется признак, указывающий для ФАР 28 или для ФАР 32 предназначены эти данные, что обеспечивает подключение выходов блока управления фазовращателями 31 к той ФАР, которая должна работать в данный момент времени. ФАР 32 конструктивно аналогична ФАР 28, но используется для формирования широкого луча, ширина диаграммы направленности которого в несколько раз больше ширины диаграммы направленности узкого луча. Диаграммы направленности обоих лучей отъюстированы таким образом, что при установке исходного (нулевого) положения фазовращателей ФАР 28 и ФАР 32, в дальней зоне антенного устройства 18 обеспечивается совпадение максимумов диаграмм направленности узкого и широкого лучей при отсутствии сканирования, а также совпадение осей сканирования лучей в процессе наведения ракеты. Попеременное включение узкого и широкого лучей используют для обеспечения встреливания управляемой ракеты в узкий луч наведения на начальном участке полета ракеты, когда возможны ее значительные отклонения от линии наведения. Коническое сканирование диаграмм направленности широкого и узкого лучей производят синхронно и синфазно с частотой Ωс.
При положении коммутатора 36, обеспечивающем соединение 1-го и 2-го плеча, работает диаграмма направленности узкого луча, который используется как на излучение, так и на прием, а передающий и приемные тракты работают так же, как и в режиме захвата цели. При переключении коммутатора 36 в положение соединения 1-го и 3-го плеч формируется диаграмма направленности широкого луча, которая используется только на излучение, причем на это время приемный тракт закрывается, обработка принятых сигналов не производится, и непрерывная работа кольца слежения за дальностью обеспечивается вторым вычислителем 22 за счет экстраполяции предыдущих результатов, а кольца слежения за азимутом и углом места цели - за счет цифрового фильтра-экстраполятора, имеющегося на выходе пикового детектора.
Формирователь команд 9 решает две задачи: во-первых, формирует и кодирует сигналы маркеров М0 в момент времени, соответствующий нулевому значению фазы колебаний частоты Ωс, и Мπ - при прохождении указанной фазы через π, поступающие на 2-й вход формирователя команд 9 с третьего выхода синхронизатора 24, во-вторых, кодирует цифровые значения угловой скорости линии визирования цели по азимуту и углу места, поступающие на 1-й вход формирователя команд 9 от 2-го выхода второго вычислителя 22. С 1-го выхода формирователя команд 9 на 1-й вход передатчика 10 периодически с частотой конического сканирования Ωс в моменты формирования маркеров М0 и Мπ выдается кодограмма (пакет данных), содержащая признак маркера (0 - для М0 и 1 - для Мπ) и параметры текущей радиокоманды для управляемой ракеты. Маркеры М0 и Мπ используют для взаимной синхронизации по фазе колебаний частоты Ωc в блоке синхронизации 6 ракеты и в синхронизаторе 24. В передатчике 10 кодограмму преобразуют в радиокоманду, например, используя времяимпульсную модуляцию, при которой за один период повторения зондирующих импульсов Ти передается один или пара радиоимпульсов, содержащих информацию одного двоичного разряда кодограммы, следующим образом: первый радиоимпульс передается всегда и занимает на временной оси положение, точно соответствующее периоду повторения Ти, и этому соответствует передача 0-го значения в текущем разряде кодограммы. Если имеется второй импульс, то он задерживается относительно первого на определенное время: задержка второго импульса на время τз соответствует передаче маркера М0, задержка на время 2τз - передаче маркера Мπ, а задержка на время 3τз - передаче значения 1 в текущем разряде кодограммы. При этом маркер всегда передается первым разрядом кодограммы.
Таким образом, процедура переноса информации на зондирующий сигнал в передатчике 10 сводится к подключению соответствующей линии задержки в цепи запуска модулятора передатчика, если в передаваемом разряде кодограммы стоит маркер или 1. В данном случае за один цикл конического сканирования луча могут быть переданы две кодограммы с объемом информации в каждой кодограмме не более числа периодов повторения зондирующих импульсов, укладывающихся на половине периода сканирования луча.
На этапе предстартовой подготовки ракеты, т.е. когда приемник 3 ракеты еще не готов к работе, со 2-го выхода формирователя команд 9 кодограмма команды передается на блок сопряжения 17 и далее на 2-й вход дешифратора команд 4 управляемой ракеты.
Блок сопряжения 17 предназначен для обеспечения взаимодействия аппаратуры конкретной управляемой ракеты, которая была назначена летчиком-оператором для данного выстрела из арсенала оружия, имеющегося на вертолете, с вертолетной аппаратурой системы наведения при подготовке к пуску и старту ракеты, в том числе для предварительной подачи на управляемую ракету электропитания, команд и сигналов управления подготовкой к старту и сигналов синхронизации. Блок сопряжения 17 содержит элементы коммутации электрических цепей пуска ракеты. На 1-й вход блока сопряжения 17 поступают команды управления подготовкой к старту от пульта управления 16. На 3-й вход блока сопряжения поступают команды управления траекторией ракеты на начальном участке трассы от формирователя команд 9. На 2-й вход блока сопряжения поступает опорный сигнал синхронизации аппаратуры ракеты частотой Ωс от синхронизатора 24. Через первый выход блока сопряжения 17 на блок управления 5 ракеты подаются предстартовые команды управления подготовкой управляемой ракеты к старту с пульта управления 16. Через второй выход блока сопряжения в синхронизатор 6 ракеты подаются сигналы предстартовой синхронизации от синхронизатора 24. Через третий выход блока сопряжения на дешифратор команд 4 ракеты передается предстартовая кодограмма управления начальным участком траектории ракеты от формирователя команд 9.
Блок управления 5 ракетой предназначен для обеспечения непосредственного управления траекторией движения ракеты по курсу и тангажу путем выработки управляющих сигналов для рулевых машинок ракеты по информации от собственных датчиков пространственной ориентации ракеты, в том числе автономное управление сразу после старта, управление по сигналам вертолетной системы наведения, а также обеспечение стабилизации траектории при отсутствии сигналов и команд вертолетной системы наведения.
После получения команды “Пуск” в блоке управления 5 ракеты производится раскрутка гироскопов и установка параметров управления в исходное положение, а также включение таймеров программного управления ракетой. В синхронизатор 6 ракеты подаются сигналы синхронизации, по которым устанавливаются частота конического сканирования, опорные напряжения по каналам курса и тангажа для измерителя угловых отклонений 7 и сигналы переключения каналов узкого и широкого лучей в приемнике 3 ракеты. В дешифратор команд 4 передается и запоминается значение угловой скорости линии визирования цели.
Синхронизатор 6 ракеты обеспечивает синхронную работу составных частей аппаратуры управляемой ракеты и содержит управляемый генератор, делители частоты и схемы формирования высокостабильных сигналов переключения приемных каналов узкого и широкого лучей на его первом выходе, которые поступают в приемник 3 ракеты, и высокостабильных опорных гармонических колебаний с частотой конического сканирования луча наведения на его втором выходе для измерителя угловых отклонений 7, а также фазовый различитель, на первый и второй входы которого подаются соответственно сигнал собственных колебаний с частотой Ωс и сигнал колебаний с той же частотой от синхронизатора 24, поступающий через блок сопряжения 17 при подготовке к старту ракеты или со второго выхода дешифратора команд 4 при наведении управляемой ракеты по лучу. Выход фазового различителя синхронизатора 6 ракеты подключен к управляющему входу управляемого генератора для поддержания синхронности и синфазности собственных колебаний синхронизатора 6 ракеты с частотой Ωс и сигналов переключения приемных каналов узкого и широкого лучей наведения с соответствующими частотам колебаний синхронизатора 24.
После старта ракеты условия пилотирования вертолета значительно облегчаются, т.к. первый вычислитель 8 производит учет изменений пространственной ориентации вертолета по данным об углах курса, крена и тангажа, поступающим от пилотажно-навигационного комплекса вертолета, вырабатывая данные для блока управления приводом 11 антенны, которые компенсируют эти изменения, что эквивалентно гиростабилизации платформы 35 антенного устройства 18.
Отключение режима наведения производится через расчетное время гарантированного подлета управляемой ракеты к цели, которое зависит от измеренной дальности до цели и известных баллистических характеристик ракеты и рассчитывается во втором вычислителе 22, где также производится формирование и передача в соответствующие блоки для исполнения признака окончания процесса наведения. Формирование этого признака производится программным способом с использованием собственного таймера второго вычислителя.
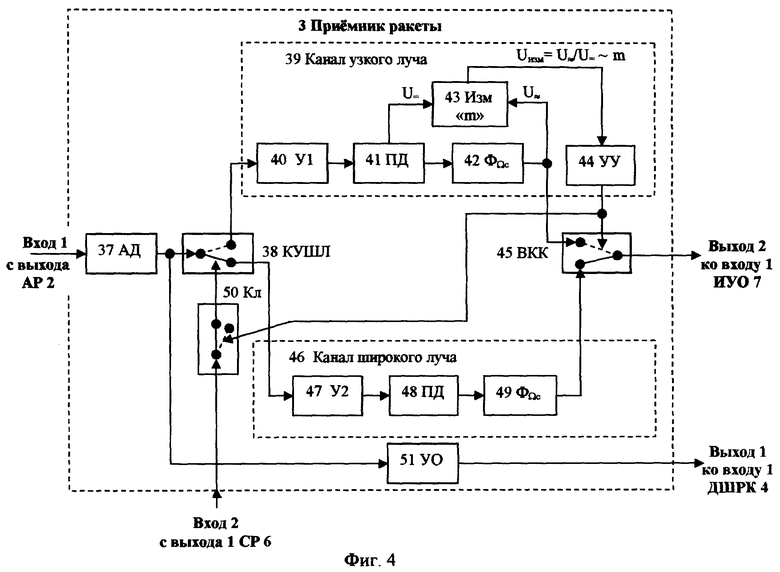
После схода управляемой ракеты с подвески вертолета прерываются ее связи с блоком сопряжения 17 и полет на разгонном участке происходит автономно под управлением ее блока управления 5. Затем начинает работать канал наведения с использованием широкого луча, а после того, как первоначальные отклонения ракеты от луча наведения 27 снизятся, в приемнике 3 ракеты происходит автоматический переход на узкий луч, по которому она наводится до встречи с целью. Этот переход производится при таком расположении торца ракеты относительно равносигнальной зоны сканирующего луча наведения, когда глубина модуляции на частоте Ωс в канале узкого луча 39 приемника 3 ракеты (см фиг.4) достигнет уровня, гарантирующего полет ракеты в рабочей зоне узкого луча наведения, например, когда глубина модуляции уменьшится до уровня менее 10%.
Рассмотрим процесс наведения управляемой ракеты по радиолучу подробнее. Зондирующие радиосигналы, излучаемые антенным устройством 18, принимаются антенной 2 ракеты, расположенной в заднем торце управляемой ракеты, и подаются на первый вход приемника 3 ракеты, блок-схема которого приведена на фиг.4. Приемник 3 ракеты содержит амплитудный детектор 37, входной коммутатор 38 сигналов узкого и широкого лучей, управляемый по сигналам синхронизатора 6 ракеты. Канал узкого луча 39 приемника 3 ракеты содержит первый усилитель 40 с автоматической регулировкой усиления, пиковый детектор 41 и фильтр-экстраполятор 42, пропускающий частоту Ωс, измеритель глубины модуляции 43 и устройство управления 44 выходным коммутатором 45 каналов. Приемник 3 ракеты еще содержит канал широкого луча 46, состоящий из второго усилителя 47 с автоматической регулировкой усиления, пикового детектора 48 и фильтра-экстраполятора 49, пропускающего частоту Ωс. Приемник 3 ракеты содержит также ключ 50 в цепи управления коммутатором 38 узкого и широкого лучей и усилитель-ограничитель 49 для формирования импульсных сигналов, выдаваемых на первый вход дешифратора команд 4. Усилители 40 и 47 предназначены для нормирования уровня напряжений на выходе каналов узкого и широкого лучей, т.е. выравнивания изменений амплитуды радиосигналов на втором выходе приемника 3 ракеты, обусловленных различием энергетического потенциала узкого и широкого лучей антенного устройства 18, а также для компенсации изменения уровня принимаемого сигнала при увеличении расстояния между управляемой ракетой и вертолетом. Пиковые детекторы 41 и 48 и фильтры-экстраполяторы 42 и 49 каналов идентичны.
Пришедшие на первый вход приемника 3 ракеты радиосигналы детектируются и видеоимпульсы зондирующих сигналов, модулированные по амплитуде, поступают на вход коммутатора 38 сигналов узкого и широкого лучей, который попеременно подключает эти видеосигналы ко входу канала узкого луча либо ко входу канала широкого луча сигналами переключения лучей, приходящими от синхронизатора 6 ракеты и свободно проходящими через нормально замкнутый ключ 50.
На второй выход приемника 3 ракеты, связанный с измерителем угловых отклонений 7 через выходной коммутатор 45, нормально замкнутый на выход канала широкого луча, выдается гармонический сигнал частотой Ωс, величина напряжения которого UΔ(t) пропорциональна величине углового отклонения ракеты от линии наведения, а фаза ϕ однозначно связана с направлением сдвига положения торца ракеты относительно точки пересечения линии наведения с плоскостью, нормальной к линии наведения и проходящей через торец ракеты

где U
В канале узкого луча имеется измеритель глубины модуляции 43, который выдает на своем выходе напряжение Uизм, пропорциональное отношению амплитуды колебаний на выходе фильтра-экстраполятора 42, равное U≈, к напряжению постоянной составляющей на выходе пикового детектора 44, равное U=, т.е Uизм=U≈/U= ~ m, где m - глубина модуляции, которое подается на вход устройства управления 44 выходным коммутатором каналов 45. Устройство управления 44 может быть реализовано, например, как триггер Шмидта, настроенный по входному напряжению таким образом, что при достижении Uизм уровня, соответствующего значению m≤10%, происходит переброс триггера Шмидта в другое устойчивое состояние. При этом он формирует сигнал переключения выходного коммутатора каналов 45 с канала широкого луча на канал узкого и в дальнейшем удерживает коммутатор 45 в этом положении. Одновременно с этим устройство управления 45 размыкает ключ 50 в цепи управления коммутацией входного коммутатора 38, который устанавливается в состояние подключения только канала узкого луча.
Коммутатор каналов 38 и ключ 50 могут быть реализованы с использованием принципов, изложенных в кн. “Аналоговые и цифровые интегральные схемы”./Под ред. С.В.Якубовского. - М.: Советское радио, 1979, с. 273-278, например, оба эти элемента могут быть реализованы на двухканальном переключателе, схема которого приведена на рис. 4.63 данного источника. Выходной коммутатор каналов 45 может быть реализован на основе многоканального МОП-коммутатора, приведенного в кн. В.Л. Шило “Линейные интегральные схемы”. - М., 1974, с. 258, рис. 8.10.
Видеоимпульсы с выхода амплитудного детектора 37 подаются также на усилитель-ограничитель 51, который может быть реализован, например, как ждущий мультивибратор, с выхода которого импульсы постоянной амплитуды подаются на дешифратор команд 4.
Дешифратор команд 4 декодирует и выделяет из потока импульсных сигналов, поступающих с приемника 3 ракеты, маркеры М0 и Мπ, с помощью которых восстанавливается гармоническое колебание с частотой Ωс, выдаваемое затем как эталонное в синхронизатор 6 ракеты. Кроме того, он поразрядно декодирует параметры радиокоманды, передаваемые с вертолета, восстанавливает кодограмму, содержащую данные об угловой скорости луча наведения по курсу и тангажу, преобразует их к аналоговому виду и передает в блок управления 5 ракеты.
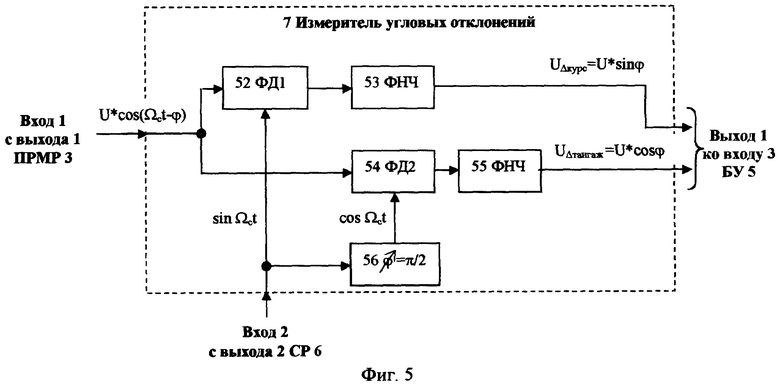
Измеритель угловых отклонений 7 выделяет из общего сигнала рассогласования UΔ(t) (3′), поступающего от приемника 3 ракеты, сигнал ошибки по курсу UΔкурс и сигнал ошибки по тангажу UΔтангаж ракеты относительно луча наведения и выдает эти данные в блок управления 5, который отрабатывает их через исполнительные элементы управления ракетой, сводя эти ошибки к нулю, т.е. выстраивая траекторию ракеты по лучу наведения. Измеритель угловых отклонений 7 (см. фиг.5) содержит два идентичных фазовых детектора 52, 54 и два идентичных фильтра нижних частот 53, 55, а также фазовращатель 56 на π/2 в цепи опорного сигнала фазового детектора 54 канала тангажа ракеты. Опорный сигнал для работы фазовых детекторов 52, 54 поступает от синхронизатора 6 ракеты. На выходе каналов курса и тангажа формируются управляющие напряжения, равные соответственно


которые поступают в блок управления 5 для формирования непосредственных управляющих воздействий на исполнительные элементы управления ракетой, преобразуя эти величины из угловых в линейные путем деления их значений на программную функцию дальности R(tпол), где tпол - полетное время, отсчитываемое таймером блока управления.
Таким образом, предлагаемая система наведения оружия обеспечивает автоматическое наведение управляемой ракеты без участия летчика-оператора после выбора им цели для атаки, задания режима захвата цели и выдачи команды “Пуск”. При наведении допускается маневрирование вертолета в широком диапазоне углов по курсу, крену и тангажу без срыва процесса наведения.
Известно (см., например, Черенкова Е.Л., Чернышев О.В. Распространение радиоволн. - М.: Радио и связь, 1984, с. 258-260, 104-106), что при распространении электромагнитных волн в атмосфере Земли происходит их дополнительное поглощение газами и водяными парами по сравнению с распространением в свободном пространстве. Степень поглощения, оцениваемая погонным ослаблением сигнала, увеличивается с ростом несущей частоты сигнала. Например, при распространении в наиболее часто встречающихся туманах с размерами капель 4-6 мкм погонное ослабление оптического сигнала при оптической видимости в тумане, равной 200 м, превышает погонное ослабление радиосигнала частотой менее 100 ГГц на величину более 90 дБ/км, что не позволяет использовать оптические сигналы в этих условиях. Использование радиодиапазона в системе наведения вместо оптического диапазона делает предлагаемую систему работоспособной при нарушении оптической видимости цели из-за дыма или тумана, а также при низком уровне освещенности, т.е. в ночных условиях.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОЛОКАЦИОННАЯ СИСТЕМА УПРАВЛЕНИЯ ПО РАДИОЛУЧУ | 2003 |
|
RU2249229C2 |
| ЗЕНИТНЫЙ РАКЕТНО-ПУШЕЧНЫЙ КОМПЛЕКС | 2006 |
|
RU2321818C1 |
| Система сопровождения целей и ракет зенитной боевой машины | 2019 |
|
RU2710994C1 |
| СИСТЕМА НАВЕДЕНИЯ ЗЕНИТНЫХ УПРАВЛЯЕМЫХ РАКЕТ БЛИЖНЕГО ДЕЙСТВИЯ | 2006 |
|
RU2324139C1 |
| БОРТОВАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ САМОЛЕТНОЙ СИСТЕМЫ УПРАВЛЕНИЯ ВООРУЖЕНИЕМ | 2001 |
|
RU2188436C1 |
| ВЕРТОЛЕТНАЯ ИМПУЛЬСНО-ДОПЛЕРОВСКАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2001 |
|
RU2191401C1 |
| ЗЕНИТНАЯ ПУШЕЧНО-РАКЕТНАЯ БОЕВАЯ МАШИНА | 2000 |
|
RU2191973C2 |
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2147136C1 |
| СИСТЕМА НАВЕДЕНИЯ ЗЕНИТНЫХ УПРАВЛЯЕМЫХ РАКЕТ БЛИЖНЕГО ДЕЙСТВИЯ | 2009 |
|
RU2394202C1 |
| ЗЕНИТНАЯ ПУШЕЧНО-РАКЕТНАЯ БОЕВАЯ МАШИНА | 2007 |
|
RU2348001C1 |
Изобретение относится к оборонной технике, а именно к радиотехническим системам наведения оружия, размещаемого на подвижных объектах - носителях оружия, и может использоваться на вертолетах для борьбы с танками, катерами, вертолетами и другими объектами. Задачей изобретения является автоматизация процесса наведения, исключающая ошибки наведения, обусловленные непосредственным участием человека-оператора, и обеспечение возможности применения системы в условиях нарушения оптической видимости цели. Технический результат - повышение эффективности вооружения. Решение указанной задачи достигается за счет того, что вертолетная система наведения оружия, содержащая установленные на вертолете вычислитель, передатчик, датчики угла азимута и угла места, индикатор, пульт управления, снабжена антенной, установленной на заднем торце ракеты, приемником ракеты, дешифратором команд, блоком управления, синхронизатором ракеты, измерителем угловых отклонений, соединенными между собой определенным образом. 5 ил.

Вертолетная система наведения оружия, содержащая установленные на вертолете вычислитель, передатчик, датчики угла азимута и угла места, индикатор, пульт управления, отличающаяся тем, что она снабжена антенной, установленной на заднем торце ракеты, приемником ракеты, дешифратором команд, блоком управления, синхронизатором ракеты, измерителем угловых отклонений, при этом антенна соединена со входом приемника ракеты, выход которого подключен ко входу дешифратора команд, а первый вход блока управления подключен к выходу дешифратора команд, а также установленными на вертолете формирователем команд, блоком управления приводом антенны, приводом антенны, блоком сопряжения, антенным устройством с электронным управлением луча, приемником, аналого-цифровым преобразователем, процессором сигналов, вторым вычислителем, блоком электронного управления антенной и синхронизатором, при этом первый вход передатчика подключен к первому выходу формирователя команд, выход датчика угла азимута и выход датчика угла места связаны соответственно с первым и вторым входами первого вычислителя, выход первого вычислителя соединен с первым входом блока управления приводом антенны, выход которого подключен ко входу привода антенны, а первый выход пульта управления соединен с первым входом блока сопряжения, первый выход которого подключен ко второму входу блока управления ракеты, первый вход синхронизатора ракеты подключен ко второму выходу дешифратора команд, второй вход - ко второму выходу блока сопряжения, а первый выход - ко второму входу приемника ракеты, первый вход измерителя угловых отклонений подключен ко второму выходу приемника ракеты, второй вход - ко второму выходу синхронизатора ракеты, выход - к третьему входу блока управления, а второй вход дешифратора команд подключен к третьему выходу блока сопряжения, при этом вход антенного устройства подключен к выходу передатчика, выход антенного устройства подключен к последовательно соединенным приемнику и аналого-цифровому преобразователю, выход которого подключен к первому входу процессора сигналов, второй вход которого соединен с четвертым выходом второго вычислителя, первый выход процессора сигналов соединен с первым входом второго вычислителя, а второй выход процессора сигналов - с индикатором, второй вход второго вычислителя соединен со вторым выходом пульта управления, третий вход второго вычислителя связан с первым выходом синхронизатора, первый выход второго вычислителя подключен к блоку электронного управления антенной, выход которого соединен со вторым входом антенного устройства, второй выход второго вычислителя подключен к первому входу формирователя команд, третий выход второго вычислителя подключен к третьему входу первого вычислителя, второй, третий, четвертый и пятый выходы синхронизатора соединены соответственно со вторым входом блока сопряжения, со вторым входом передатчика, со вторым входом формирователя команд и со вторым входом аналого-цифрового преобразователя, второй выход формирователя команд подключен к третьему входу блока сопряжения, четвертый вход первого вычислителя подключен к пилотажно-навигационному комплексу вертолета, а второй вход блока управления приводом антенны соединен с третьим выходом пульта управления.
| СИСТЕМА УПРАВЛЕНИЯ ВООРУЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 1999 |
|
RU2150070C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВООРУЖЕНИЕМ ИСТРЕБИТЕЛЯ | 1988 |
|
RU2024818C1 |
| DE 3714405 A1, 09.06.1988 | |||
| US 4383661 A, 17.05.1983. | |||

